

1. 서 론
2. 전산해석 기법
2.1 LBM 전산해석 기법
2.2 전산해석 모델 및 해석자 검증
2.3 전산해석 격자 및 유동 조건
3. 전산해석 결과
3.1 동체 표면의 유동특성 분석
3.2 동체 상하부 유동 간섭
3.3 받음각 조건에 따른 동체 박리 지점 분석
4. 결 론
1. 서 론
고속 및 장거리 작전 수행 능력에 대한 요구가 증가함에 따라, 차세대 회전익 항공기의 개발이 전 세계적으로 활발히 진행되고 있다. 특히 차세대 기동 헬리콥터는 고속성과 고기동성을 핵심 성능 목표로 설정하고 있으며[1], 기존 단일 로터 헬리콥터의 속도 한계를 극복하기 위한 다양한 형상이 제안되고 있다. 기존 단일 로터 헬리콥터는 구조적 제약으로 인해 전진 비행 속도가 약 150–200 kts 수준에 머무르며, 이로 인해 항속 거리 또한 제한적이다. 또한 이러한 속도 제한은 전진면(Advancing Side)에서 발생하는 충격파 현상의 영향도 있다[2]. 기존 헬리콥터의 속도 제한을 극복하기 위해, 복합형 추진 개념을 포함한 신개념 회전익 플랫폼들이 제안되고 있으며, 고속 비행을 위한 형상적 진화가 가속화되고 있다[3,4]. 대표적으로, 미국의 FLRAA(Future Long Range Assault Aircraft) 사업은 UH-60을 대체할 고속 기동 헬리콥터 개발을 목표로 하며, 동축 반전 로터(Coaxial Rotor) 및 전환형(Tilt Rotor) 플랫폼을 통해 250 kts 이상의 전진 비행 속도 달성을 지향하였다[5]. 유럽연합 및 NATO에서는 NGRC(Next Generation Rotorcraft Capability) 프로젝트를 통해 고속·장거리 기동, 생존성 향상, 다임무 수행 능력 등을 핵심 요구사항으로 설정하고 있으며, 복합형 및 전환형 플랫폼을 모두 잠재적 대안으로 검토 중이다. 이처럼 고속 회전익 항공기 개발을 위한 기술적 접근은 글로벌 차원에서 다양하게 추진되고 있다[6,7,8]. 한편, 국내의 지형적 특성은 회전익 항공기 운용 방식에 있어 추가적인 제약 요인으로 작용한다. 산악 지형과 도서 지역이 많아 기동 반경 확보에 제약이 크며, 활주로 기반의 운영이 제한되는 경우가 많다. 이러한 조건을 고려할 때, 활주로 없이 수직 이착륙이 가능하면서도 고속 비행 성능을 확보할 수 있는 동축 반전 복합형 회전익기가 유효한 대안으로 평가되고 있다[9,10].
동축 반전 복합형 회전익기는 상하 반전 로터(Coaxial Counter-Rotating Rotors)를 통해 단일 로터 대비 후류 상호작용을 억제하고, 추가적으로 푸셔(Pusher) 프로펠러를 장착하여 전진 비행 시 추가 추력을 확보함으로써 고속·장거리 임무에 적합한 형상으로 주목받고 있다[6]. 특히, 동축 반전 로터는 전진 비행 시 발생하는 비대칭 양력(Asymmetric Lift) 문제와 토크 반작용(Torque Reaction)을 효과적으로 상쇄할 수 있어, 고속 비행 중 안정성을 유지할 수 있는 구조적 장점을 가진다. 또한, 푸셔 프로펠러를 통해 순항 단계에서 추진력을 효율적으로 분담할 수 있어, 순항 효율 향상 측면에서도 유리하다. 이와 함께, 제자리 비행 호버링에도 적합한 비행 특성을 가져 다임무 기체 플랫폼으로의 확장성 또한 높다. 그러나 동축 반전 복합형은 다수의 로터 시스템을 구동하기 위한 동력 계통의 복잡성으로 인해 메인 기어박스(Main Gearbox)의 대형화가 불가피하며, 허브와 축 페어링(Fairing) 구조의 채택으로 인해 동체 형상이 상대적으로 두껍고 공기역학적으로 불리한 무딘(Blunt) 형태가 되는 한계를 지닌다[2]. 이러한 구조적 특성은 고속 비행 시 항력 증가의 주요 원인으로 작용하여, 전체 비행 성능 저하를 유발할 수 있다.
회전익 항공기에서 발생하는 항력은 크게 유도 항력(Induced Drag)과 유해 항력(Parasite Drag)으로 구분되며[11], 고속 영역으로 갈수록 유해 항력의 비중이 급격히 증가한다. 특히 유해 항력 중 압력 항력(Form Drag)은 전체 항력의 절반 이상을 차지하는 것으로 보고되고 있으며[12], 이는 동체와 허브 주변의 유동 박리(Flow Separation)와 복잡한 후류 유동(Wake Flow)에 기인한다. 선행 연구에 따르면 동체에서 발생하는 항력은 전체 항력의 약 40%, 허브 항력은 30% 이상을 차지할 수 있어, 두 구조물은 고속 비행 성능을 제한하는 핵심 저항 요소로 간주된다[11,12]. 따라서 고속 성능 확보를 위한 차세대 회전익 항공기의 개발에서는 동체 및 허브 형상에 기인하는 항력 저감 기술이 필수적으로 요구되며, 이에 대한 공력적 이해 및 정량적 해석은 매우 중요한 연구 주제로 대두되고 있다.
이와 관련하여, 회전익 항공기 동체 주변의 유동 특성과 항력 발생 메커니즘에 대한 다양한 연구가 수행되어 왔다. Michelsen et al.[13]은 헬리콥터 동체에 작용하는 항력을 유도 항력과 유해 항력으로 구분하고, 이 중 후방 동체에서 발생하는 압력 항력이 전체 항력에서 큰 비중을 차지함을 보고하였다. Renaud et al.[11]은 허브와 동체가 결합된 형상을 대상으로 수치해석을 수행하여, 허브 후류와 동체 간의 공력 간섭이 후류 구조를 복잡하게 만들고 결과적으로 압력 항력을 증가시킴을 확인하였다. Batrakov et al.[14]은 URANS(Unsteady Reynolds Averaged Navier-Stokes) 기법을 활용하여 공기역학적으로 무딘 형상에서 발생하는 비정상 박리 유동과 압력 회복 지연 현상을 분석하였으며, 이러한 유동 현상이 동체 항력의 주요 원인임을 제시하였다. Schaeffler et al.[15]은 능동 유동 제어(Active Flow Control, AFC) 기법을 동체에 적용하여, 램프(ramp) 구간에서의 유동 박리 억제 가능성을 실험 및 수치해석을 통해 입증하였다. 해당 연구는 국소적인 유동 제어를 통해 항력 저감 효과를 확인한 바 있다. Park et al.[16]은 고속 복합 회전익기 동체를 대상으로 풍동 시험과 RANS(Reynolds Averaged Navier-Stokes) 기반의 전산해석을 수행하였고, 엔진 카울링 및 전방 동체 구간에서 발생하는 박리 유동이 전체 항력에 크게 기여함을 보고하였다. 이처럼 회전익 항공기 동체 주변 유동 및 항력 특성에 대한 다수의 연구가 수행되어 왔으며, 이를 기반으로 다양한 유동 제어 기법들이 제안되고 있다. 유동 제어 기법은 수동적(Passive Flow Control, PFC) 방식과 능동적(Active Flow Control, AFC) 방식으로 구분된다. 대표적인 PFC 기법으로는 Vortex Generator, Strake, Cavity Step 등이 있으며, 이는 경계층에 와류를 유입시켜 후류 형성을 지연시키고 경계층 재부착을 유도함으로써 압력 항력을 저감하는 방식이다. Selvaraju et al.[17]은 단순화된 동체 형상인 Ahmed Body에 Vortex Generator를 적용하여 후류 면적을 축소시키고, 항력을 약 10–15% 감소시킬 수 있음을 확인하였다. AFC 기법으로는 Synthetic Jet과 Continuous Jet이 대표적이며, 외부 유동을 직접 조작하기 위해 제트 분사 또는 플라즈마 구동기를 활용한다. 이들은 경계층의 에너지를 강화하거나 박리 발생을 지연시키는 방식으로 작용한다. 관련 연구로 Schaeffler et al.[13]은 NASA의 ROBIN-mod7 형상을 대상으로 슬롯 위치에 따른 제트 분사가 전방 동체 구간의 유동 박리를 효과적으로 억제하고, 최대 35%에 달하는 항력 저감 효과를 달성할 수 있음을 보고하였다.
기존의 대부분 연구는 회전익 항공기 동체 표면에서 발생하는 국소적인 박리 유동 현상에 주로 집중되어 있으며, 특히 동체 상하부에서 동시에 발생하는 박리 유동 간의 상호 간섭이 전체 항력에 미치는 영향에 대해서는 종합적인 분석이 부족한 실정이다. 이에 본 연구에서는 Lattice–Boltzmann Method(LBM) 기반의 고충실도 전산유체해석을 통해 해당 간섭 효과를 정량적으로 규명하고자 하였다. 무딘 형상을 갖는 회전익기 동체를 대상으로 상하부 표면에서 발생하는 박리 유동의 특성을 파악하고 박리된 유동이 후방에서 간섭하며 형성하는 후류 구조 및 압력 항력 증가 메커니즘을 분석하였다. 본 연구는 기존 연구에서 다루지 못한 동체 상하부 박리 유동 간의 상호작용 효과를 새롭게 분석함으로써, 고속 회전익기 동체 형상의 박리 유동 특성을 고찰하였다. 또한 향후 유동 제어 장치 설계 및 부착 위치 선정 시 기초 데이터로 활용될 수 있어, 항력 저감을 위한 공력 설계 기술 개발에 실질적인 기여를 할 수 있을 것으로 기대된다.
2. 전산해석 기법
2.1 LBM 전산해석 기법
본 연구에서는 회전익기 동체 형상에서 발생하는 박리 유동을 정밀하게 해석하기 위해 LBM를 기반으로 하는 상용 전산유체해석 소프트웨어인 PowerFLOW를 사용하였다. LBM은 전통적인 RANS 해석 기법에 비해 수치적 소산이 낮고[18], 비정상 3차원 유동 및 복잡한 후류 구조를 고해상도로 포착할 수 있는 장점을 갖는다. 또한, LBM은 운동론적 이론(Kinetic Theory)을 기반으로 한 메조스코픽(Mesoscopic) 접근법으로, 격자 상에서 유체 입자의 충돌과 이동 과정을 확률 분포 함수를 통해 계산하는 방식이다[19,20,21]. 지배 방정식은 선형 대수 형태로 이산화되며, 행렬 해석을 요구하지 않아 병렬 연산에 매우 적합하고, 대규모 격자 기반 해석에서도 높은 계산 효율성을 제공한다[18,19,22]. 이러한 특성 덕분에 LBM은 최근 비정상 유동이 주요한 복잡 형상에 대한 해석에서 활발히 활용되고 있으며[21,22,23], 특히 본 연구와 같이 무딘 형상의 회전익기 동체 주변에서 발생하는 비정상 유동 박리, 후류 발달, 공력 간섭 현상 해석에 적합한 기법으로 평가된다[24].
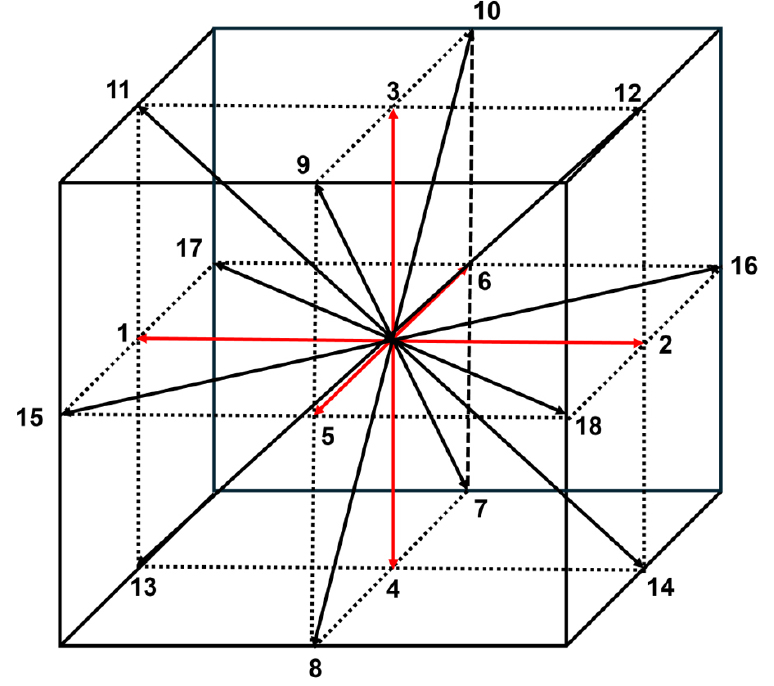
LBM 기법에서 입자들의 이동은 DaQb 격자 모델로 표현되며, 여기서 a는 차원의 개수, b는 입자들이 격자 내에서 이동할 수 있는 방향의 개수를 의미한다. 본 연구에서는 3차원 해석에 사용되는 D3Q19 모델을 적용하였으며[21], 이산화된 격자와 격자 내 입자들의 이동은 Fig. 1에 표현하였다.
입자 분포 함수는 격자점마다 정의되며, 지배방정식인 Lattice-Boltzmann 방정식을 바탕으로 식 (1)과 같이 정의된다. 식 (1)의 좌변의 는 시간별 입자들의 위치에 대한 분포 함수를, 는 방향으로 이동하는 입자의 속도 벡터를 의미하며, 우변 의 경우 충돌 항을 의미한다[18]. 이 항은 격자점에서의 입자 분포 함수 의 충돌 과정에서의 변화과정을 나타내며, LBM에서는 Bhatnagar-Gross-Krook(BGK) 완화 모델을 이용하여 나타낸다[21]. 이는 충돌(Collision) 단계에서 각 격자점의 입자 분포 함수 는 BGK 단일 완화 모델에 따라 국소 평형 분포 함수 로 지수적으로 완화되며, 이를 통해 미시적인 입자 충돌 효과를 모사한다.
식 (2)는 앞서 설명한 BGK 모델이 적용된 을 나타내며, 우변의 𝜏는 완화 시간(Relaxation Time)을 의미한다. 이때 완화 시간 𝜏의 경우 격자 공간의 크기, 유체의 점성, 이산 시간 간격에 따라 결정되고[21,22], 식 (3)과 같이 표현된다. 는 입자의 음속을 의미하며 으로 나타낼 수 있다. 이후 충돌 과정에서 분포 함수가 수렴하는 기준이 되는 평형 분포 함수 는 저 마하수 영역에서 식 (4)와 같이 Maxwell-Boltzmann 평형 분포를 근사한 형태로 나타낼 수 있으며[20], 속도 항을 Taylor 전개를 통해 2차 수준까지 단순화할 수 있다. 이때 는 국소 유속(Local Velocity), 𝜌는 유체 밀도(Density), 는 해당 속도 방향의 가중치 상수이며, 식 (5)와 같이 정의된다[24].
따라서, LBM에서 거시적 유동 변수는 격자점마다 정의된 입자 분포 함수로부터 직접 계산되며, 이때 유체의 밀도와 운동량, 에너지는 식 (6), (7), (8)과 같이 정의된다.
압력의 경우 격자 내의 음속인 를 바탕으로 상태 방정식을 이용하여 식 (9)와 같이 구할 수 있다.
본 연구에서는 LBM-Very Large Eddy Simulation(LBM-VLES) 해석 기법을 사용하여 난류 유동을 고려하였다. LBM-VLES는 LBM의 계산 효율성을 기반으로, 완화 시간을 난류 스케일에 맞추어 조절함으로써 난류 효과를 반영한다. 이를 위해 Renormalization Group(RNG) 기반의 RNG 모델을 사용하여 난류 점성을 계산하며[20,21], 이때 난류 운동 에너지 와 난류 소산율 𝜖을 기반으로 한 유효 완화 시간을 통해 난류 특성을 LBM 해석에 반영할 수 있다[18,25]. 이를 통해 대규모 와류 구조는 직접적으로 해석하고 소규모 난류 성분은 모델링 함으로써 계산 비용과 정확성 간의 균형을 확보한다. 특히 LBM-VLES는 LES에 비해 상대적으로 적은 격자 수와 계산 자원으로도 와류 상호작용 및 비정상 유동 특성을 효과적으로 재현할 수 있어 복잡한 회전익기 주변 유동 해석에 적합하다.
2.2 전산해석 모델 및 해석자 검증
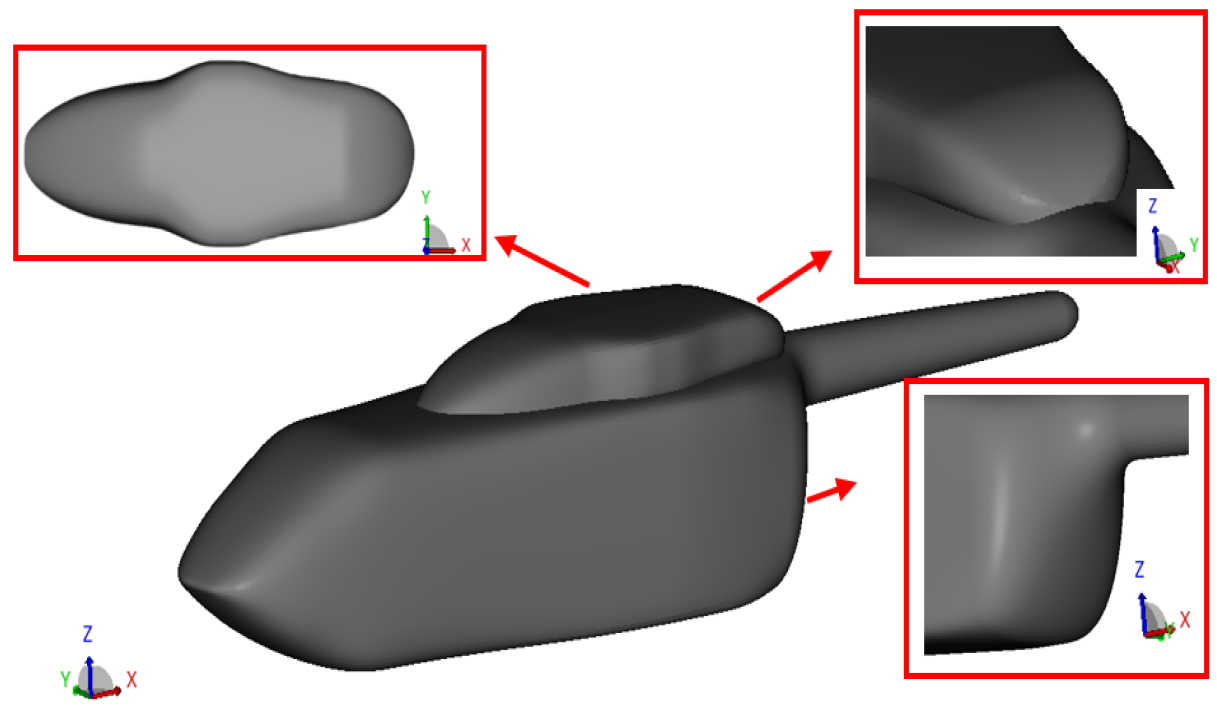
본 연구에서는 단일 동체 형상에서 발생하는 유동 박리 현상의 물리적 특성을 분석하기 위하여 메인 바디와 엔진 카울링, 테일 형상만을 포함하는 단일 동체 모델을 적용하여 Fig. 2에 형상을 제시하였다. 동체 하부는 후방 램프 구간에서 급격한 경사를 가지며, 상부에는 엔진 카울링이 부착되어 있다. 카울링은 전후방에 뭉툭한 형상을 가지며, 양 측면에 돌출부가 형성되어 있다. 해석에 사용된 동체 모델의 경우 길이가 L 이고 높이는 0.21L인 축소 모델 형상을 이용하여 전산해석을 수행하였고, 이때, 동체의 길이 방향은 X축으로 정의하였으며, 스팬(Span) 방향과 높이 방향을 각각 Y, Z 축을 따라 정의하였다.
동체 형상에서 발생하는 유동 박리 현상의 물리적 특성을 분석하기에 앞서, 본 연구에서 사용한 LBM 해석 기법의 정확성을 검증하였다. 검증은 건국대학교 다목적 아음속 풍동 시험에서 측정된 항력 데이터를 기준으로 수행하였다. 해당 풍동은 본 해석의 모델과 같이, 뭉툭한 회전익 항공기 동체 형상을 포함하는 HCUR(High speed Compound Unmanned Rotorcraft) 모델의 공력 특성을 분석하기 위해 해당 모델의 축소 모형을 이용하여 풍동 시험을 수행하였고, 비 정렬 격자 기반의 상용 CFD인 STAR CCM+을 이용하여 RANS 기반 수치해석과 비교 검증을 수행한 바 있으며, 축소 모형에대한 시험 결과와 CFD 간 높은 일치도가 확인된 바 있다[16].
실험과의 비교에 앞서 Fig. 3에 제시된 바와 같이 격자 수렴성 검증을 수행하였다. 받음각 0° 조건에서 30 m/s의 전진 비행 해석을 수행하였다. 격자 수렴성 테스트를 수행한 Coarse, Medium, Fine cases는 최소 격자 크기를 단계적으로 감소시키며 항력 계수 변화를 관찰하였으며, Table 1에 제시한 바와 같이 각각 동체 길이(L)를 기준으로 0.08%, 0.04%, 0.03% 수준의 최소 격자 크기를 적용하였다. 각 Case 별 총 격자의 수는 5,800만 개, 9,100만 개, 1.9억 개가 사용되었으며, 각 해석은 Intel(R) Xeon(R) Gold 6430 CPU 576 Cores를 이용하여 3.3, 6.4, 19.7 시간이 소요되었다. 본 연구에서는 공동연구팀에서 수행한 시험 결과와 LBM 해석 결과를 비교하기 위해 항력계수 계산 시 기준 면적을 1 m2로 설정하였다. 항력 계수 예측값과 실험값 간의 일치도는 격자 크기가 줄어들수록 개선됨을 확인하였으며, 특히 Medium 이상의 격자 조건에서는 예측값과 실험값 차이가 10 Counts 이내로 수렴하여, 본 해석자의 타당성이 검증되었다[26]. 이에 따라 계산 효율성과 정확성을 고려하여 Medium 수준의 격자를 적용하였다. 격자 수렴성 테스트 결과를 바탕으로 받음각 변화에 따른 항력 변화 예측 결과를 풍동 시험 결과와 비교함으로써 해석자 검증을 수행하였다.
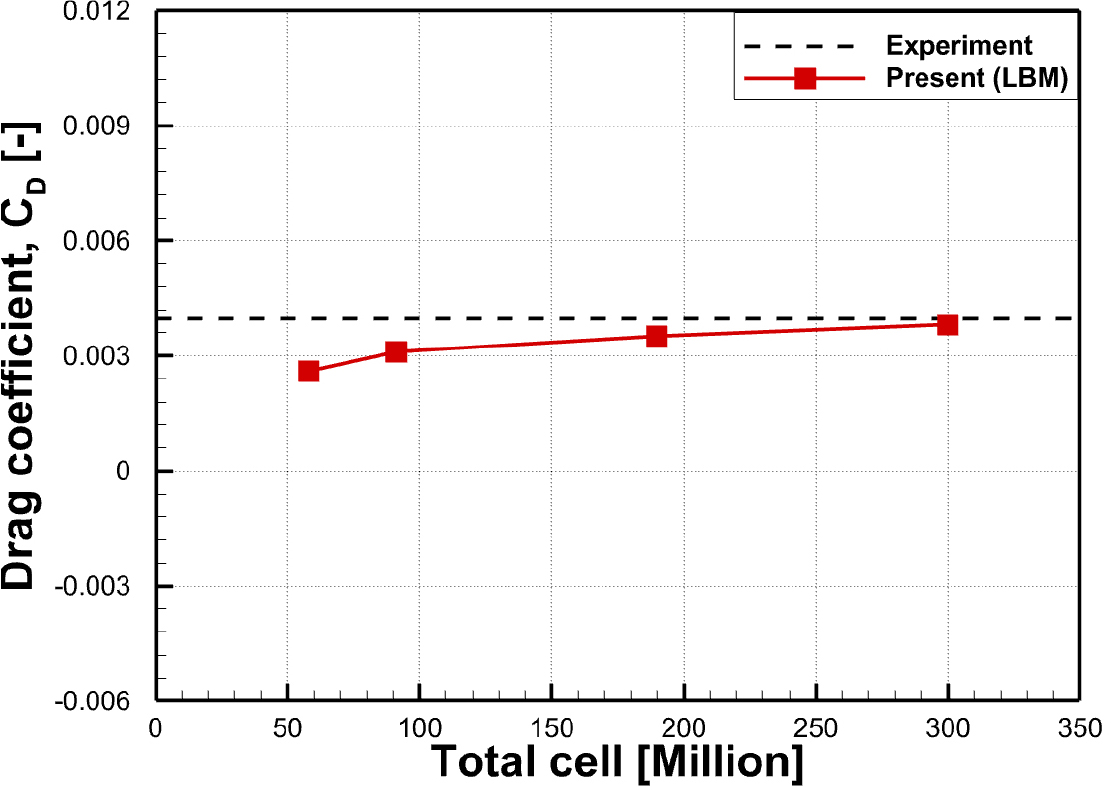
Table 1.
Result of grid resolution test (L: length of fuselage)
항력 예측은 –12°부터 12°까지 6° 간격으로 총 다섯 조건에 대해 수행하였으며, 결과를 Fig. 4에 제시하였다. 또한 실험과 전산해석(LBM) 결과를 Table 2에 정량적으로 나타내었으며, 결과값 간의 오차는 모든 받음각 조건에서 0.2~10 Counts 수준으로 나타나 전반적으로 낮은 수준을 유지하였다[26]. 특히 –6° 조건에서는 LBM 해석 결과가 0.00302, 실험값이 0.003으로 나타나 오차가 0.2 Counts에 불과했으며, 가장 높은 정확도를 보였다. 이러한 결과를 통해 제안된 전산해석 기법이 모든 받음각 범위에서 항력 특성을 신뢰성 있게 예측할 수 있음을 확인하였다. 검증과 함께 받음각 변화에 따른 항력 거동을 분석하였을 때 동체 항력은 받음각이 음양의 방향으로 증가함에 따라 전반적으로 증가 경향을 보였다. 이때 받음각 –6° 조건에서의 항력이 0° 조건보다 낮게 나타났는데, 기준 조건인 받음각 0°의 항력값보다 음의 받음각 조건에서 오히려 더 작은 항력 값이 산출되었다. 이에 따라, 받음각 0° 및 –6° 조건을 중심으로 동체 후미 Ramp 구간에서의 박리 유동 구조와 항력 변화를 비교 분석하였다. 본 연구에서 고려한 동체 형상은 후미에 급격한 Ramp 구간을 포함하고 있어 해당 구간에서 유동 박리가 크게 발생하는 특징을 갖는다. 받음각 –6° 조건에서는 유동이 Tail Boom을 따라 흐른 후 Ramp 구간에 유입되며, 이로 인해 받음각 0° 조건 대비 유동 박리 현상이 상대적으로 완화되는 것을 확인하였다. 이러한 박리 완화는 –6° 조건에서 실험 결과와 전산해석 결과 간 상대 오차가 낮게 나타난 원인으로 판단되며, 자세한 원인 분석은 이후 3.3절의 받음각 조건에 따른 동체 박리 지점 분석에서 표면 마찰 및 압력 분포를 통해 설명하였다. 다만, 전체 받음각 범위에서 동체 항력 변화 경향성은 비교적 잘 예측됨을 확인하였다. 또한, 항력계수 오차의 경향을 보다 정밀하게 해석하기 위해 양력계수에 대한 비교 분석을 수행하였으며, 그 결과를 Table 3에 정량적으로 제시하였다. Fig. 5에는 받음각별 양력계수에 대한 LBM 해석 결과와 실험 결과를 함께 도시하였다. 실험과 해석 결과 간 정량적인 오차는 존재하였으나, 전 받음각 구간에 걸쳐 양력계수는 받음각 증가에 따라 선형적으로 증가하는 경향을 잘 예측하였으며, 특히 양력의 부호가 전환되는 받음각 -6°에서 0° 구간의 특성도 확인하였다. 다만, 고 받음각 조건에서는 최대 오차가 약 10% 수준으로 나타났다. 이에 따라, 본 연구에서는 받음각 변화에 따른 유동 특성을 분석하고, 그 결과를 바탕으로 항력 특성을 규명하고자 한다.
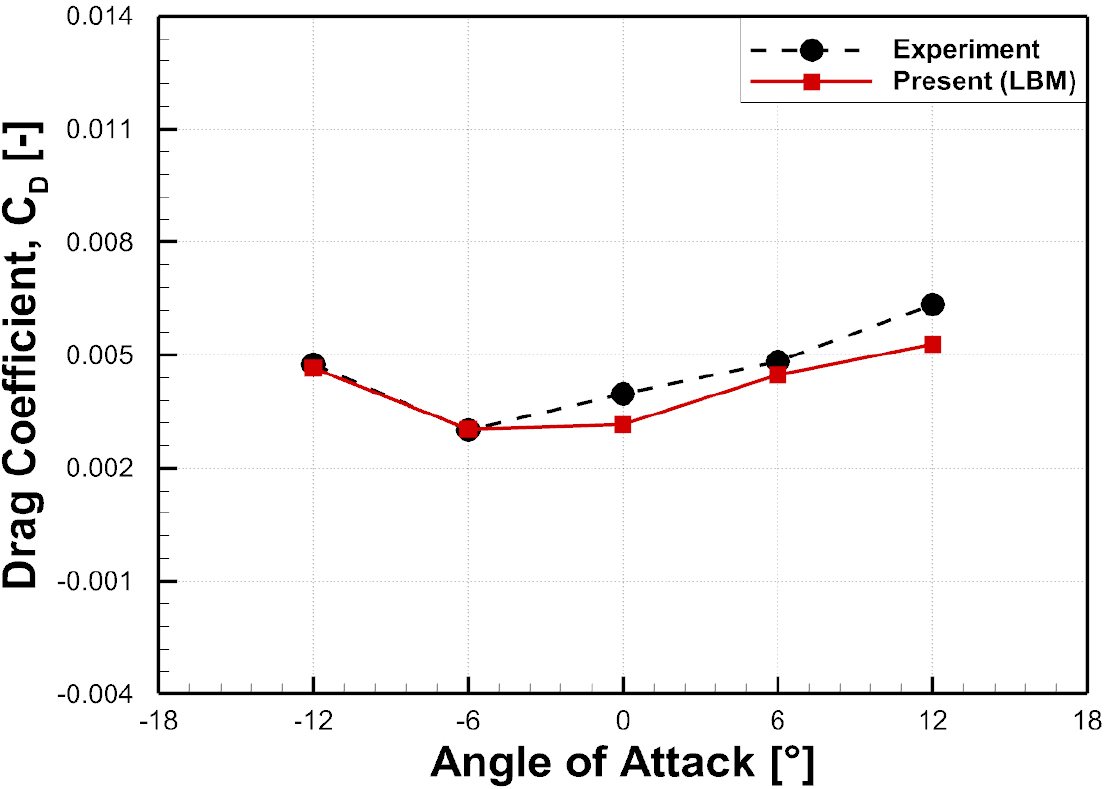
Table 2.
Comparison of drag coefficient depending on angle of attack
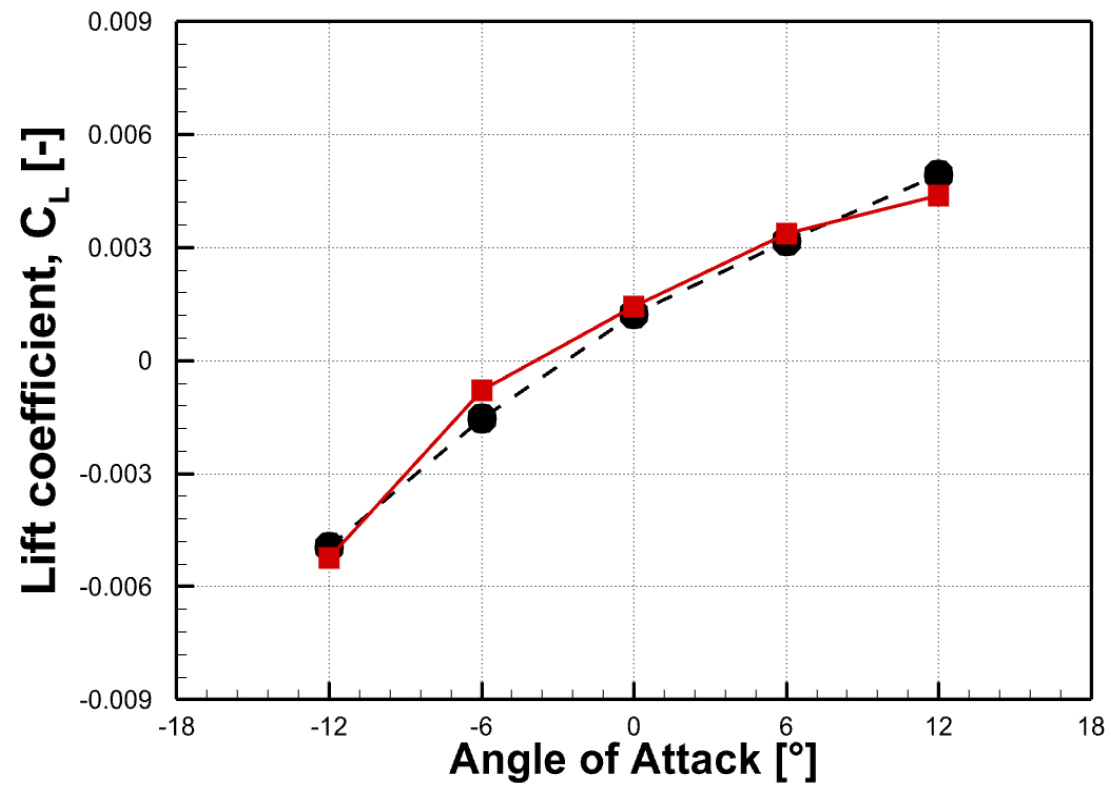
Table 3.
Comparison of lift coefficient depending on angle of attack
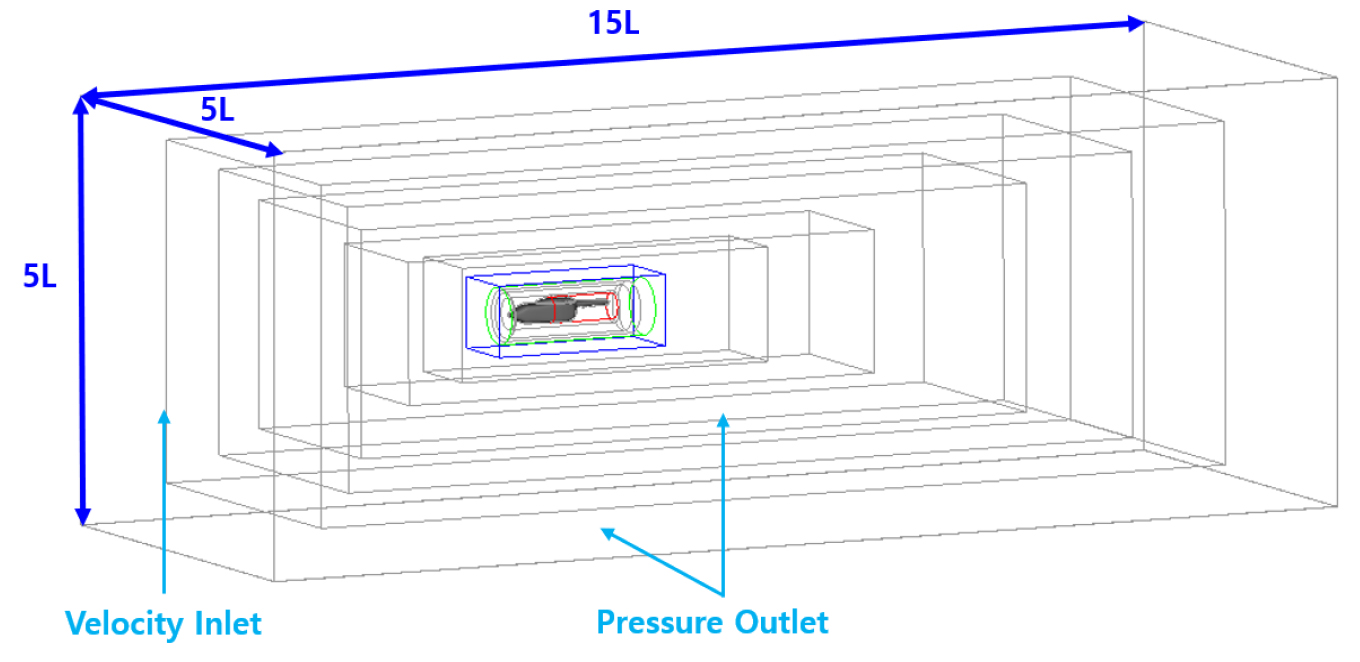
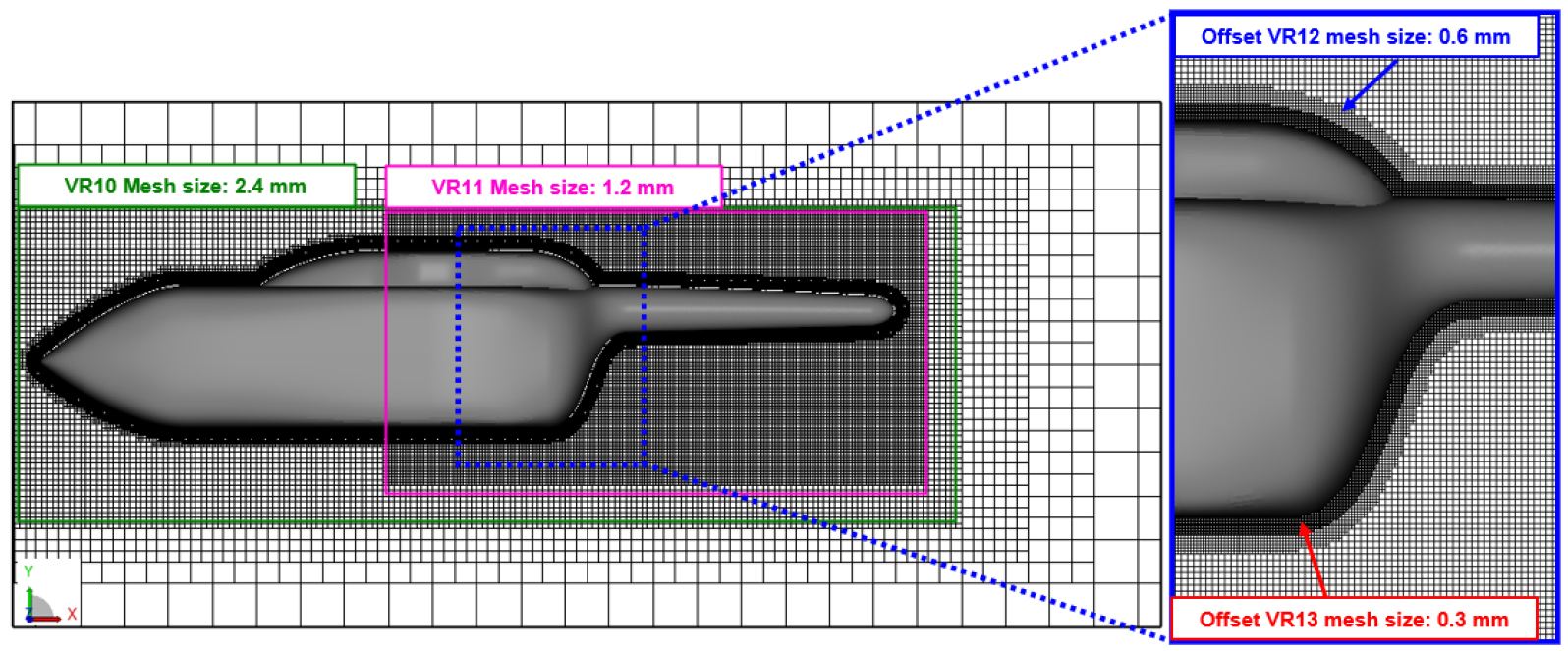
Fig. 6은 전산해석에 사용된 전체 계산 영역을 나타냈다. 계산 영역은 동체 길이(L)를 기준으로 길이 15L, 폭 5L, 높이 5L의 직육면체로 구성하였으며, 총 9,100만 개의 격자를 사용하였다. 또한 PowerFLOW의 Variable Resolution(VR) 기능을 활용하여 전체 계산 영역을 14개의 공간으로 구분하고 격자 조밀도를 조절하였다. 앞선 격자 수렴성 테스트 결과, Medium Case 조건에서 10 Counts 수준의 실험값과 예측값 간의 높은 일치도를 확인하였다. 따라서 예측 정확성과 계산 효율성을 고려했을 때, 본 연구에서는 Medium Case 조건의 격자수준을 받음각 변화에 따른 박리 유동 분석에 활용하였다. Fig. 7은 단일 동체 주변의 공간 격자 분포를 나타낸 것으로, 동체 후방 및 엔진 카울링 부근에서 발생하는 유동 박리 현상을 정밀하게 포착하기 위하여 해당 영역에 추가적인 격자 조밀도를 부여하였다. 경계 조건은 동체의 전진 방향에 Velocity Inlet을, 나머지 다섯 면에는 Pressure Outlet을 부여하였다.
2.3 전산해석 격자 및 유동 조건
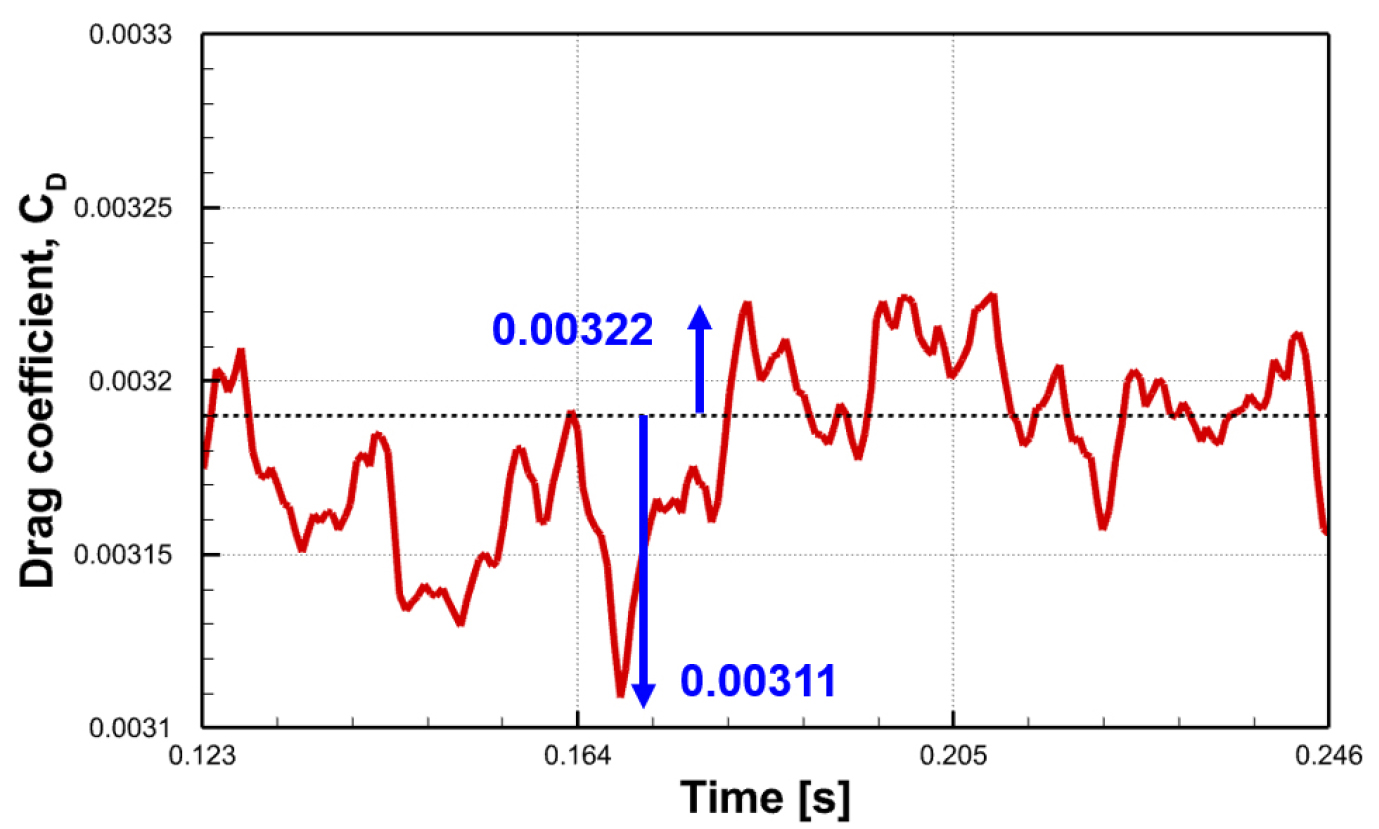
본 연구에서 수행한 전산해석의 유동 조건은 아래 Table 4에 정리하였다. 해석 조건은 건국 대학교에서 수행된 풍동 시험과 동일하게 구성하였으며, 전진 비행 속도 30 m/s에서 동체 받음각을 –12°부터 6° 간격으로 증가시켜 12° 조건까지 총 5개의 경우로 구성하였다. 총 해석 시간은 0.246 초로 설정하였으며, 이는 전진 비행 속도와 동체 길이를 고려하였을 때 충분한 계산 시간으로, 정상 상태 이후의 유동 발달을 반영하도록 설정하였다. 본 연구에서는 비정상 해석 결과에 대한 정량적인 비교 분석을 위해 0.123~0.246초 구간에서의 공력 데이터를 평균화하였다. Fig. 8은 동체 받음각 0도 조건에서 시간에 따른 동체의 항력계수 변화를 나타내었고, 이를 통해 동체 후면의 Ramp 영역에서 발생하는 박리 유동의 영향으로 동체 항력계수가 시간에 따라 불규칙하게 변화하는 것을 확인할 수 있다. 단일 동체 형상은 프로펠러와 같은 회전익 형상이 존재하는 경우와 달리 뚜렷한 주기적 변동이 발생하지 않으므로, 수치해석의 수렴성을 확보하기 위해 별도의 기준이 필요하다. 이에 본 연구에서는 전진 비행 속도(u)와 동체 길이(L)를 이용하여 무차원 시간 간격(u/L)을 정의하였다. 이는 동체를 따라 흐르는 유동이 한번 완전히 통과하는 시간 간격으로 해석할 수 있으며, 총 10번의 시간 간격에 대해 전산해석을 수행함으로써 계산 결과의 수렴성을 확보하였다. 이러한 접근은 동체 주위에서 발생하는 비정상 와류 구조와 항력 변동 특성이 안정화되었음을 보장하며, 평균화된 항력 계수의 신뢰도를 높이는 데 기여한다.
3. 전산해석 결과
본 장에서는 받음각에 따른 항력 특성을 정량적으로 분석하고자 한다. 3.1, 3.2절의 경우 받음각 0°에서 동체 상하부의 표면 데이터를 분석하고, 이후 3.3절에서 받음각 변화에 따른 박리 지점 변화를 바탕으로 항력 특성과 표면의 유동 특성 간의 상관관계를 분석하고자 한다. 동체 표면의 박리 현상은 동체 후방 경사면의 급격한 곡률 변화나 돌출된 무딘 형상(Ramp, Cowling) 부근에서 명확하게 확인된다. 이에 따라, 본 연구에서는 이러한 형상적 특징을 가지는 동체 형상에 대해 상부의 엔진 카울링과 하부 후방의 램프 구간을 중심으로 유동 특성을 분석하였으며, 동체 노즈와 테일 지점을 연결한 중심선(centerline)을 기준으로 상부와 하부를 구분하고, 각 영역의 압력 분포 및 표면 마찰 분포를 바탕으로 표면 유동 특성을 검토하였다.
3.1 동체 표면의 유동특성 분석
3.1.1 동체 상부 표면의 박리 유동
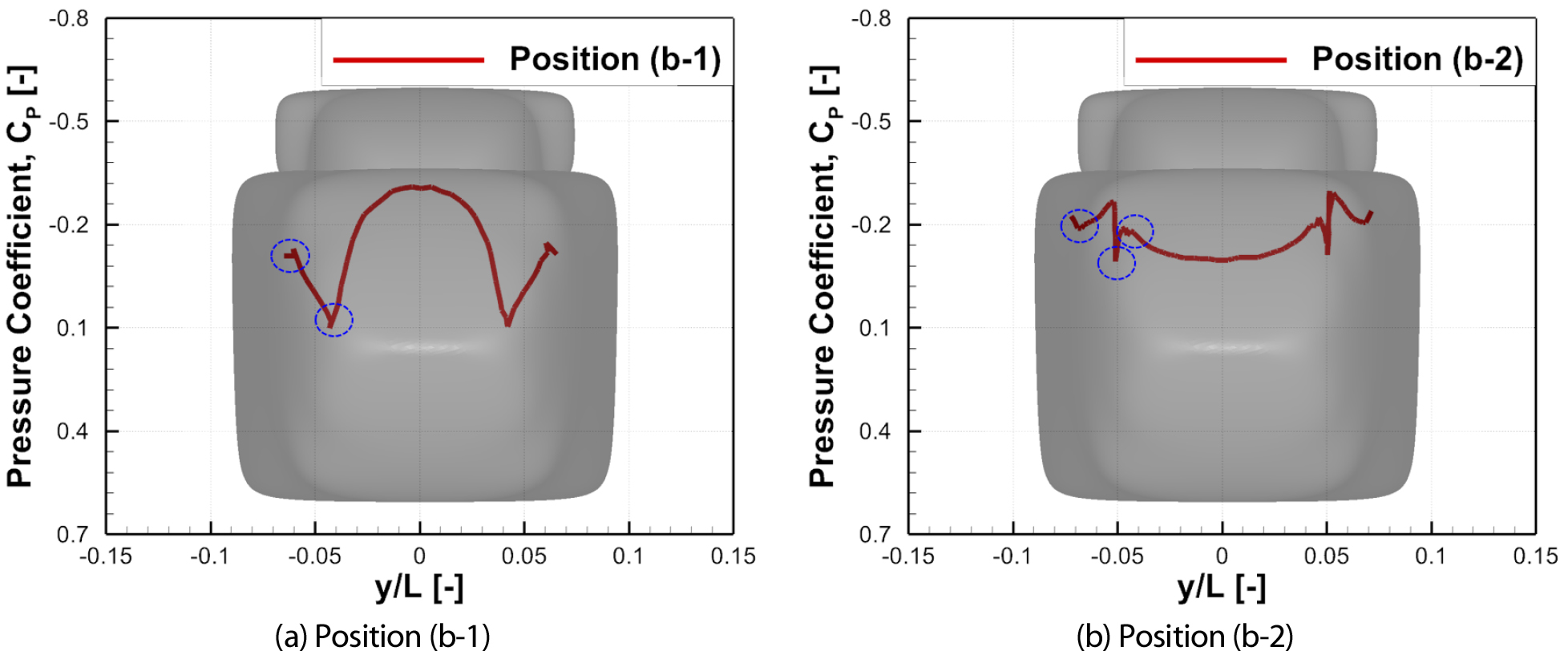
앞서 언급한 바와 같이 동체 측면의 유동 특성을 반영하여 동체 상부를 구분하기 위해, 동체 중심선을 기준으로 상부의 압력 분포를 나타내는 그래프 Fig. 9를 바탕으로 동체 상부의 유동 특성 구간을 정의하였다. 이때, 동체 측면의 유동 박리 발생 지점을 반영하기 위해 카울링 측면 돌출부의 표면 마찰 계수 분포를 나타낸 Fig. 10을 바탕으로 측면의 돌출부 전·후방에서 급격한 곡률 변화로 인해 국부적인 박리가 발생하는 두 지점에 대하여 각각 (b-1), (b-2)로 정의하였다. 이를 바탕으로 동체 상부의 구간과 각 구간에 속한 지점들의 정량적인 위치는 Table 5와 같이 나타내었으며, 상부 엔진 카울링 전방의 유동 특성을 분석하기 위해 해당 영역을 Section 1로 정의하였고, 카울링 측면에서 발생하는 유동 특성을 집중적으로 분석하기 위해 Section 2로 구분하였다. 마지막으로 엔진 카울링 후방에서 급격한 경사면을 갖는 형상으로 인해 발생하는 박리 유동 분석을 위해 해당 영역을 Section 3으로 구분하였다.
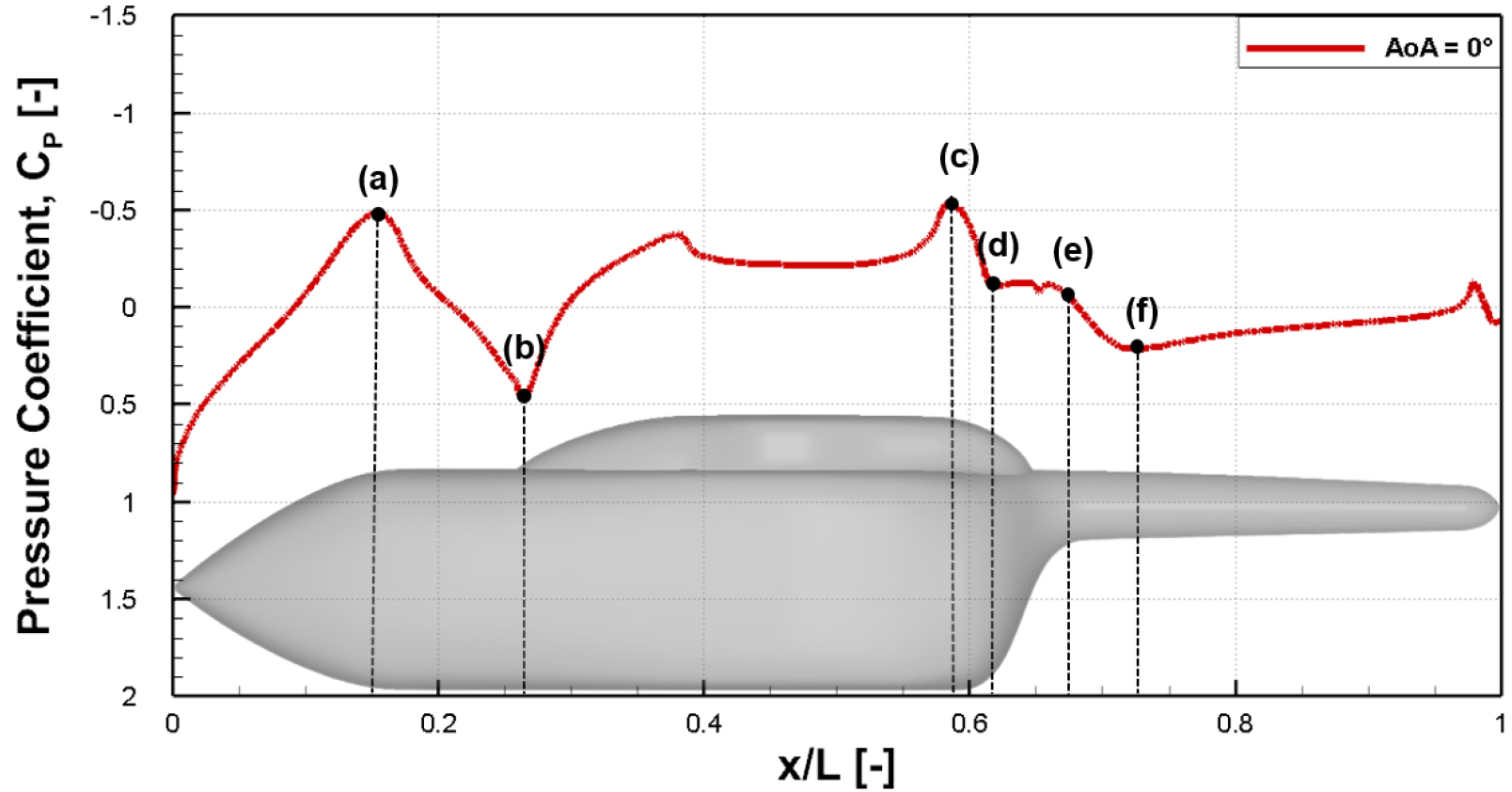
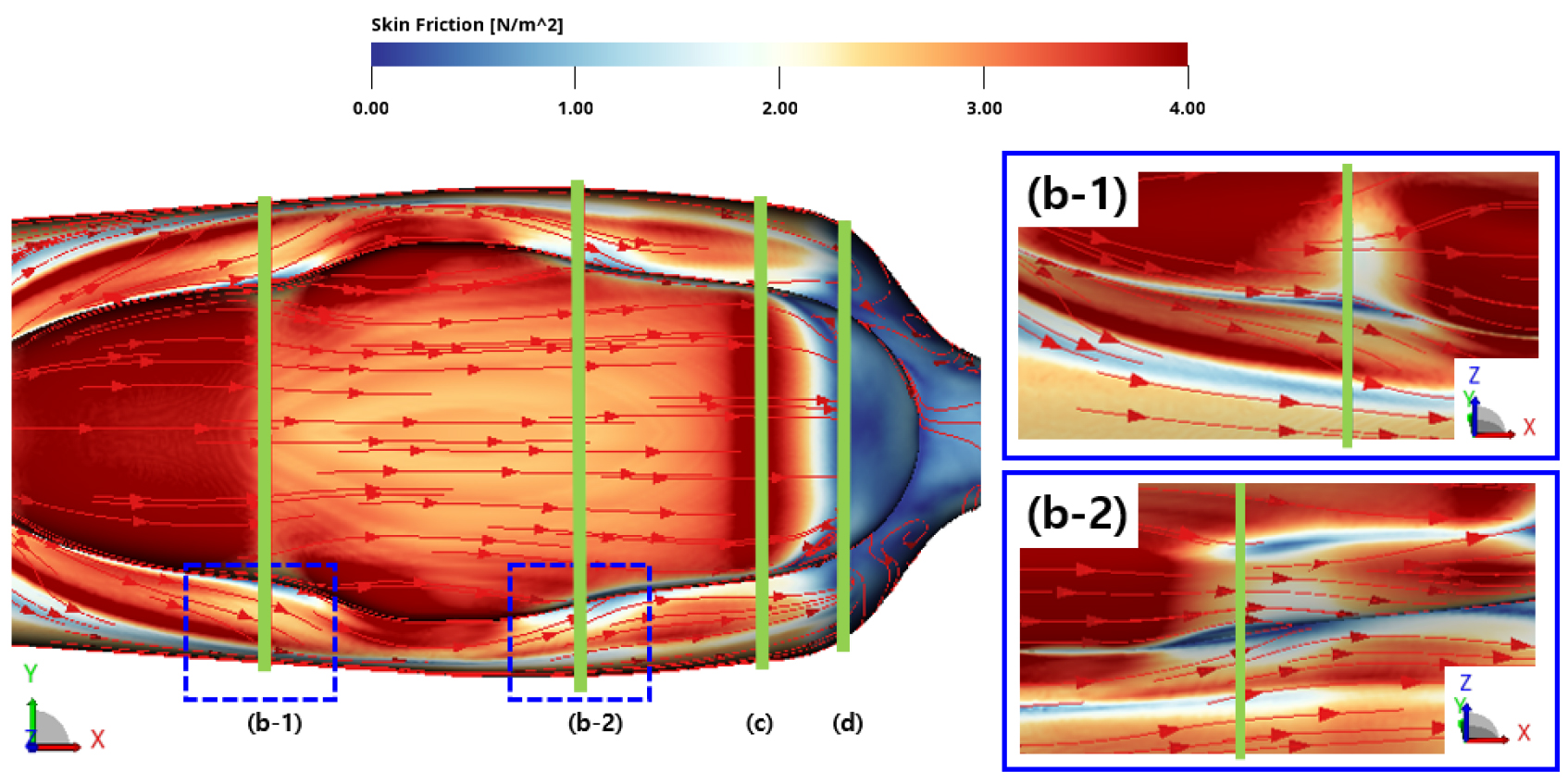
Table 5.
Definition of longitudinal fuselage sections and analysis point locations on upper surface
| Section | Point | x/L [-] |
| Section 1 | (a) | 0.1503 |
| (b) | 0.2643 | |
| Section 2 | (b-1) | 0.3891 |
| (b-2) | 0.5135 | |
| Section 3 | (c) | 0.5861 |
| (d) | 0.6189 | |
| (e) | 0.6635 | |
| (f) | 0.7162 |
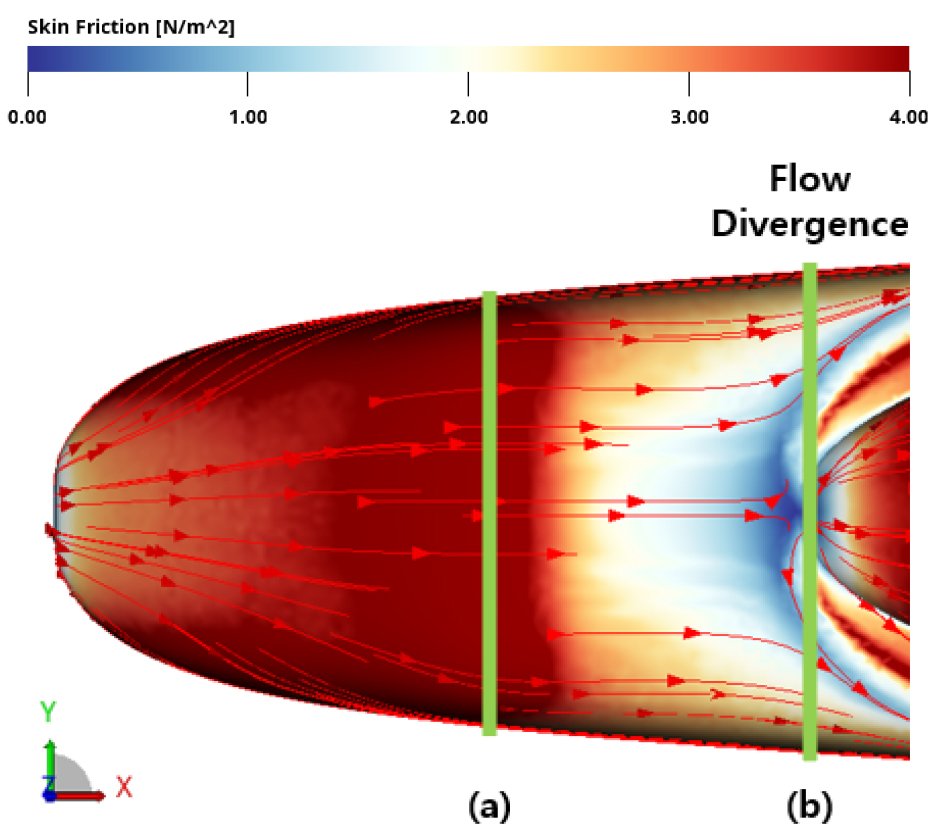
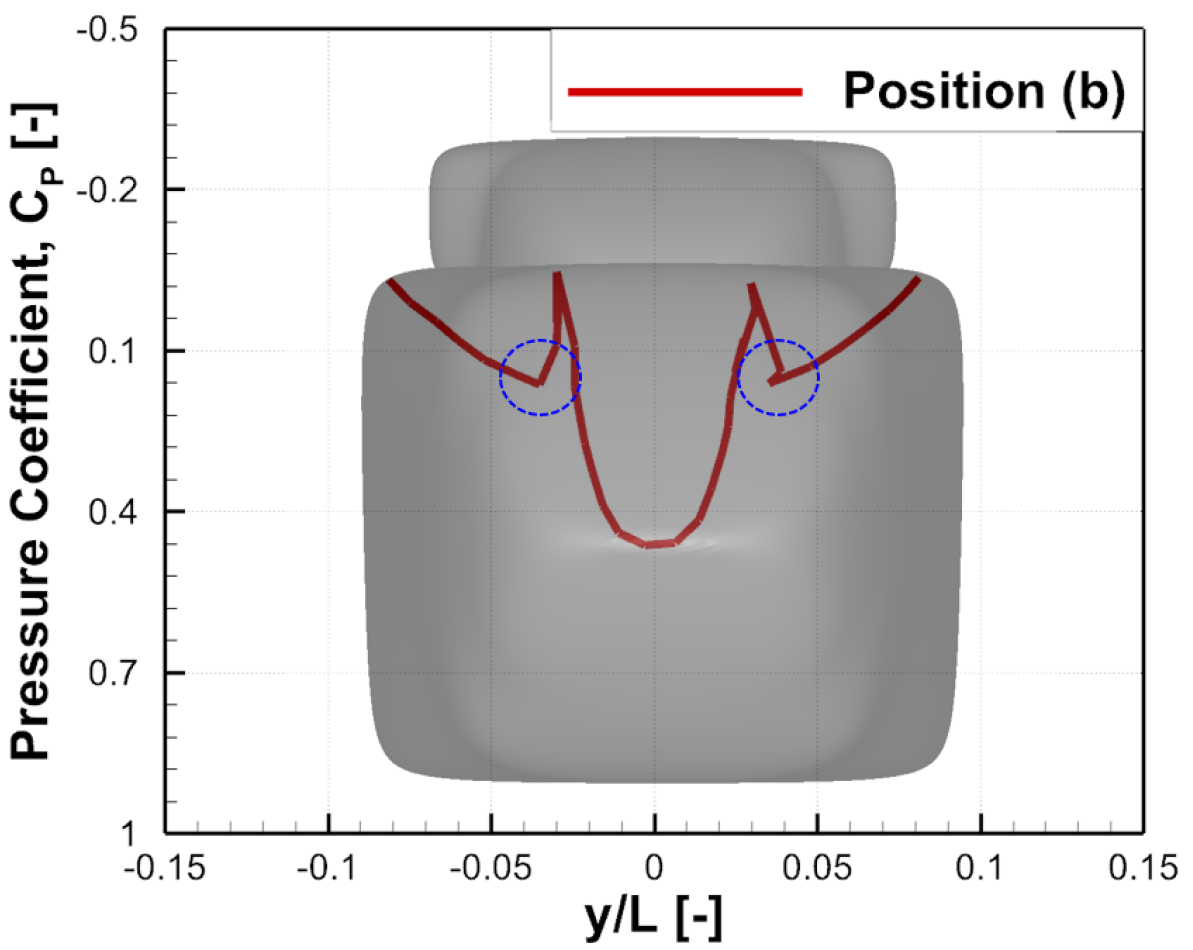
Section 1은 동체 전방 노즈에서부터 엔진 카울링의 전방까지로 정의되며, 유동 가속 및 정체 거동이 주요 특성이다. 앞서 Fig. 9에서 확인되듯, 지점 (a)에서 압력 계수 (Cp)는 최소값에 도달하며, 이는 노즈 경사면을 따라 유동이 가속된 결과이다. 이후, 지점 (b)에서는 정체점 형성에 의해 압력이 급격히 상승한다. 이러한 유동 거동은 Fig. 11의 표면 마찰 계수 분포에서도 확인되며, 정체점 인근에서 유동이 좌우로 갈라지는 흐름이 명확히 관찰된다. 또한, Fig. 12의 스팬 방향 압력 분포는 지점 (b) 위치에서 중심을 기준으로 양측에 고압 피크가 형성되어 있음을 보여준다. 이는 유동이 돌출부를 우회하면서 형성되는 압력 집중 현상으로 해석된다.
Section 2는 카울링 측면의 뭉툭한 돌출부 전후방 구간으로, 복잡한 곡률 변화로 인한 국부 박리 현상이 관찰되었다. 특히, 지점 (b-1)과 (b-2)는 각각 돌출부의 전방과 후방에 해당되며, Fig. 10 및 Fig. 13에서 박리 유동의 위치 및 압력 분포를 명확히 확인할 수 있다. Fig. 13은 동체 스팬(y축) 방향의 표면 압력 분포를 나타낸 것이다. 지점 (b-1)에서는 카울링 하부의 급격한 곡률 변화에 의해, 벽면 근처에서 초기 박리가 발생하지만, 반면 지점 (b-2)에서는 상하부 모두에서 박리가 발생하였다. 특히 상부에서 추가적으로 발생한 박리는 곡면을 따라 진행하던 유동이 돌출부의 급격한 곡률 변화를 극복하지 못해 분리된 것으로 해석된다. 또한, 두 지점 모두에서 동체 양 끝단에 부분적인 고압 유동이 나타났으며, 이는 지점 (b)에서 좌우로 분리된 유동이 재부착하지 못하고 측면을 따라 이동하면서 형성된 박리 유동에 기인한다. 결과적으로 돌출부 후방에서 재부착하지 못하고 측면으로 흘러 Juncture Vortex 구조가 형성되고, 이로 인해 동체 양 끝단에 고압 유동이 나타나고 압력 항력이 증가하는 것으로 해석된다[27].
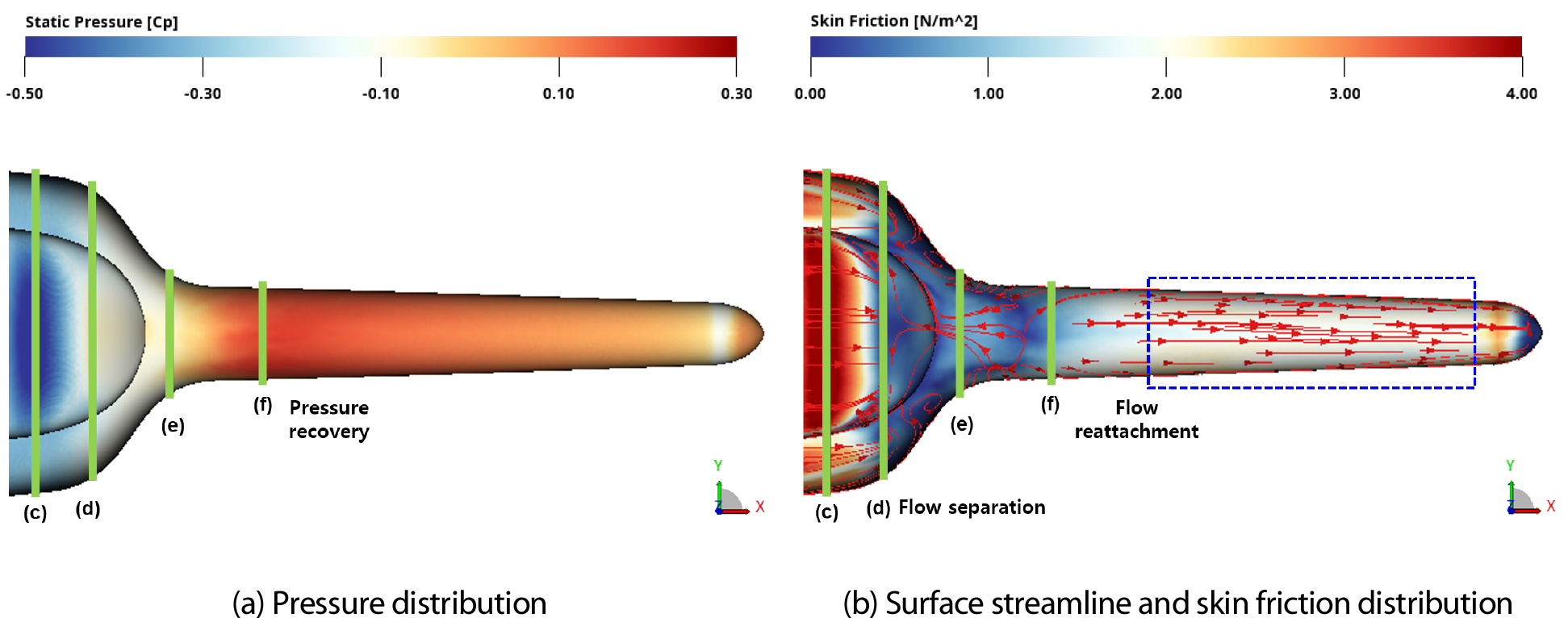
Section 3에서는 엔진 카울링 후방에서 평탄부를 지난 후 급격한 경사면 형상으로 인해 유동이 가속되는 특성이 관찰되었다. Fig. 9의 압력 분포에서 확인할 수 있듯이 지점 (c)에서 최대 속도에 도달한 이후 급격한 감속과 함께 역압력 구배가 형성되면서 지점 (d)에서 유동 박리가 발생하였다. 지점 (d)부터 (e) 구간에서는 압력 계수가 일정하게 유지되어 완전 박리 유동 구간임이 확인되었다. Fig. 14는 해당 구간에서 표면 압력 분포, 표면 마찰 계수 및 유선 분포를 보여준다. Fig. 14(a)에서 확인할 수 있듯이 동체 후방에서는 압력이 점진적으로 회복되었으며 지점 (f)에서 최대값에 도달하였다. 마찰 계수 및 유선 분포 (Fig. 14(b))에서도 이 위치에서 일부 유동이 동체 테일붐 상부에 재부착되는 경향이 관찰된다. 이로 인해 유선은 자유류 방향으로 정렬되었고 마찰 계수 역시 회복되는 양상이 확인되었다. 이는 이전 박리 유동의 일부가 회복된 것으로 해석되며, 후방 압력 항력 감소에 기여할 수 있는 중요한 유동 특성이다.
3.1.2 동체 하부 표면의 박리 유동
동체 하부의 유동 특성을 정량적으로 분석하기 위해, Fig. 15에 제시된 표면 압력 분포를 기준으로 Section 4, Section 5를 정의하였다. Section 4는 동체 하부가 점진적으로 좁아지는 구간으로, 압력 분포와 표면 마찰 계수 변화를 통해 유동 가속과 박리 발생 특성을 분석하였다. Section 5는 박리 유동이 형성된 이후 압력 회복과 재부착 과정을 검토하기 위해 정의하였다. 각 구간에 포함되는 지점의 위치는 Table 6에 정리하였다.
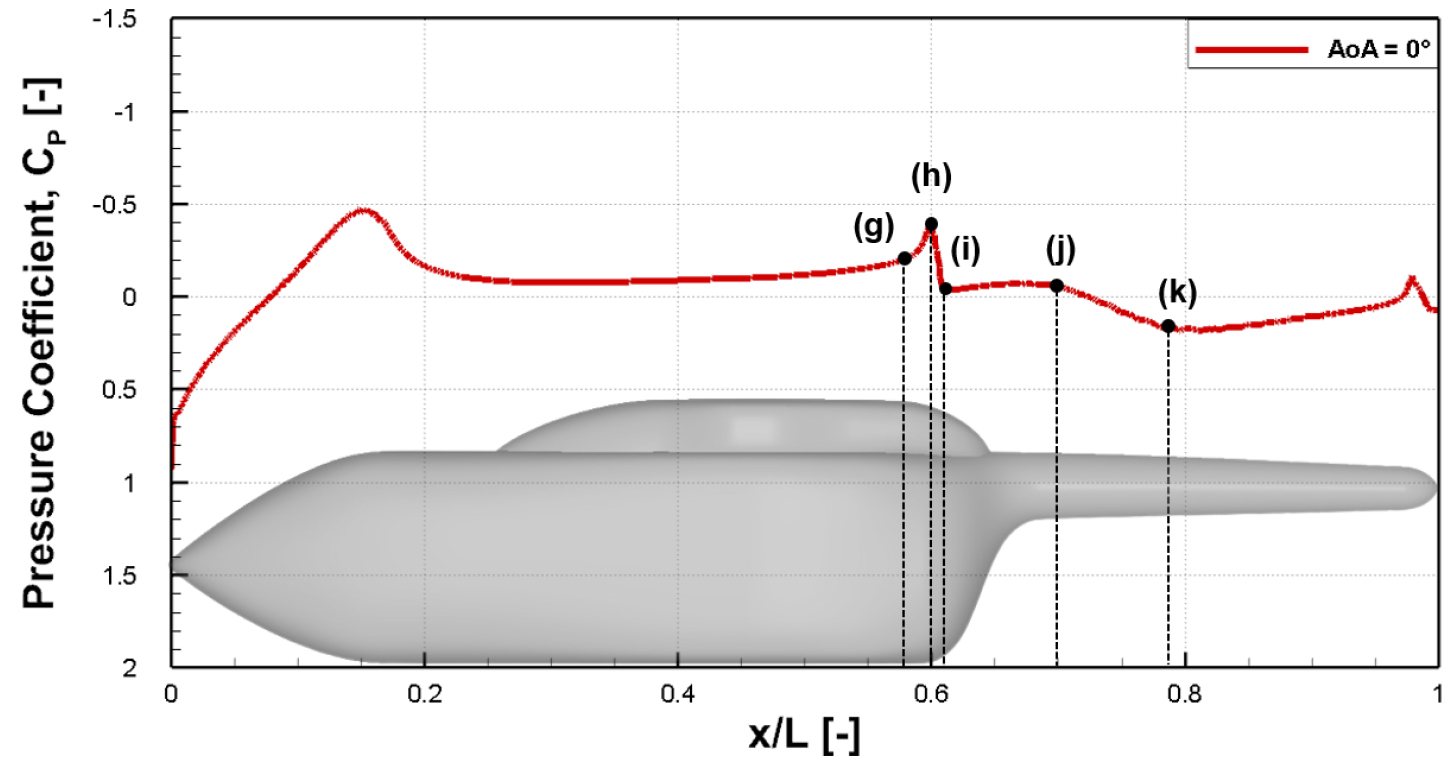
Table 6.
Definition of longitudinal fuselage sections and analysis point locations on lower surface
| Section | Point | x/L [-] |
| Section 4 | (g) | 0.5800 |
| (h) | 0.6000 | |
| Section 5 | (i) | 0.6100 |
| (j) | 0.6900 | |
| (k) | 0.8100 |
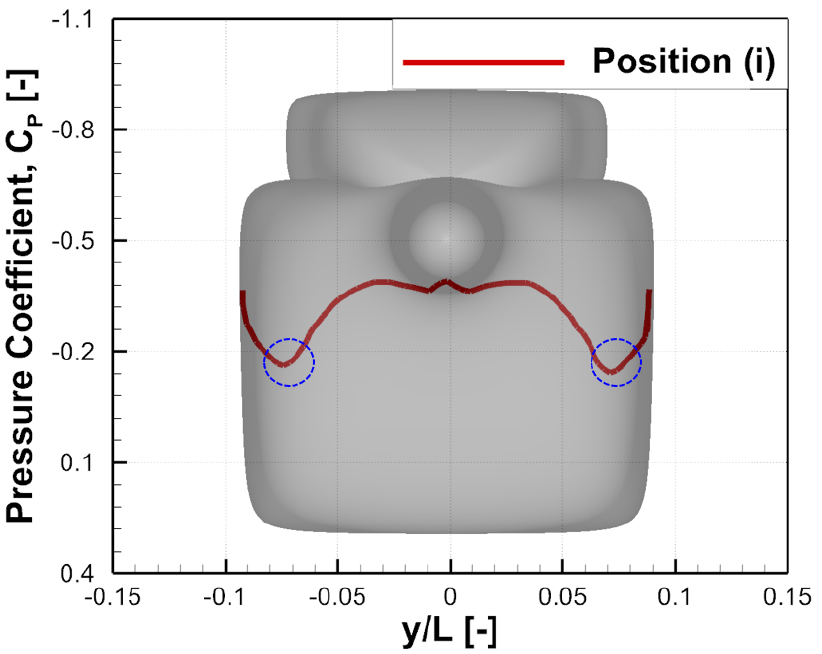
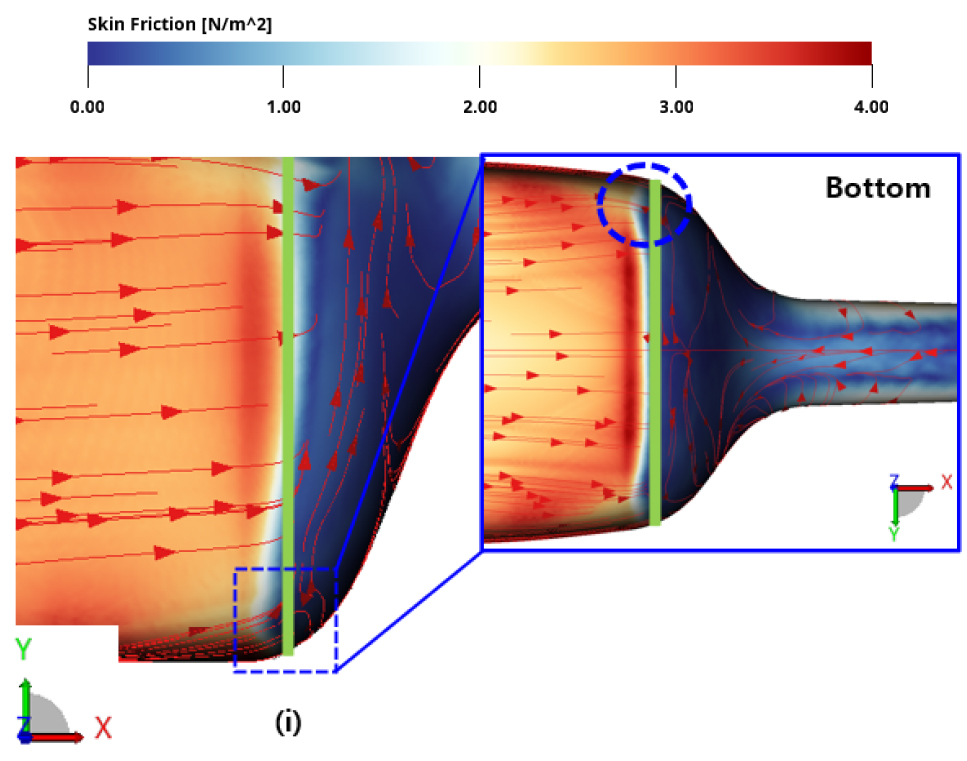
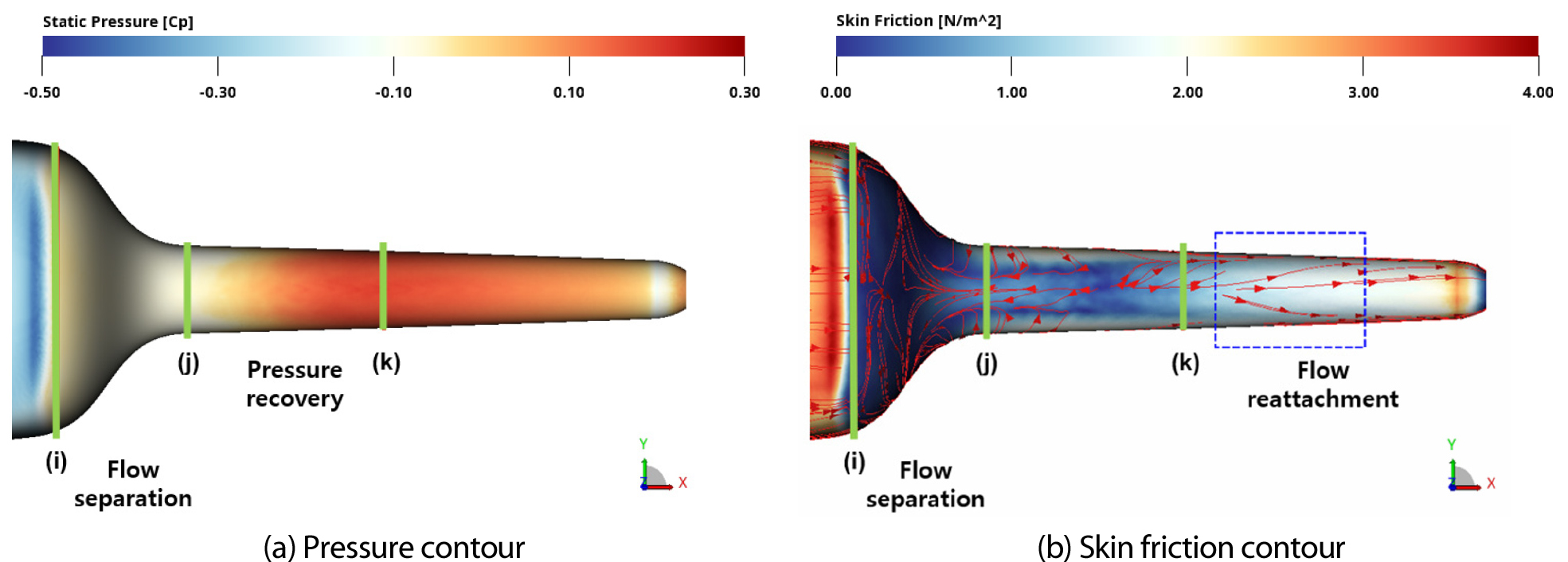
Table 6에 제시된 동체 하부 구간을 기준으로 각 구간의 유동 특성을 정밀하게 분석하였다. Section 4의 지점 (g)에서는 Fig. 15의 동체 길이 방향 표면 압력 분포에 따라 압력이 점진적으로 감소하는 경향이 나타났다. 이는 동체 하부 형상이 후방으로 갈수록 좁아짐에 따라 유동이 가속된 결과로 해석된다. 이후 지점 (h)에서 압력이 최저값에 도달한 뒤, 램프 구간에 이르러 급격한 압력 상승과 함께 역압력 구배가 형성되었다. 이러한 불안정한 압력 구배는 유동의 부착을 유지하지 못하게 하였으며, 결국 Section 5의 지점 (i)에서 박리 현상이 발생하였다. Fig. 16의 스팬 방향(y축) 압력 분포를 살펴보면, 박리는 중심선보다는 양측 모서리에서 먼저 시작되었음이 확인되었다. 이는 Fig. 17의 표면 마찰 계수 분포에서도 동일하게 관찰되었는데, 특히 모서리 부근에서 벽면 전단력이 급격히 감소하면서 국부 박리가 뚜렷하게 형성되었다. 이러한 결과는 선행 연구[16]에서 보고된 바와도 일치하며, 모서리에서의 급격한 곡률 변화가 조기 박리를 유발하는 주요 원인임을 다시 한번 입증한다. 지점 (i)에서 발생한 박리는 지점 (j)에 이를 때까지 지속되었으며, 이 구간에서는 압력 계수가 거의 일정하게 유지되었다. 이는 해당 영역이 완전 박리 유동 구간임을 의미하며, 실제로 이 영역에서는 와류가 형성되어 표면과의 상호작용이 단절되는 특성이 나타났다. 이후 동체 후방으로 갈수록 압력이 점진적으로 회복되는 경향을 보였다. Fig. 18에 제시된 표면 압력 분포, 표면 마찰 계수 및 유선 분포에 따르면, 지점 (k) 이후에는 유선이 자유류 방향으로 정렬되고 표면 마찰 계수 역시 회복되는 양상이 확인되었다. 이는 앞서 발생한 박리 유동의 일부가 동체 테일 붐 상부 표면에 재부착된 결과로 해석되며, 이러한 재부착 현상은 후방 압력 회복을 촉진하여 전체 항력 특성에 영향을 미친다.
3.2 동체 상하부 유동 간섭
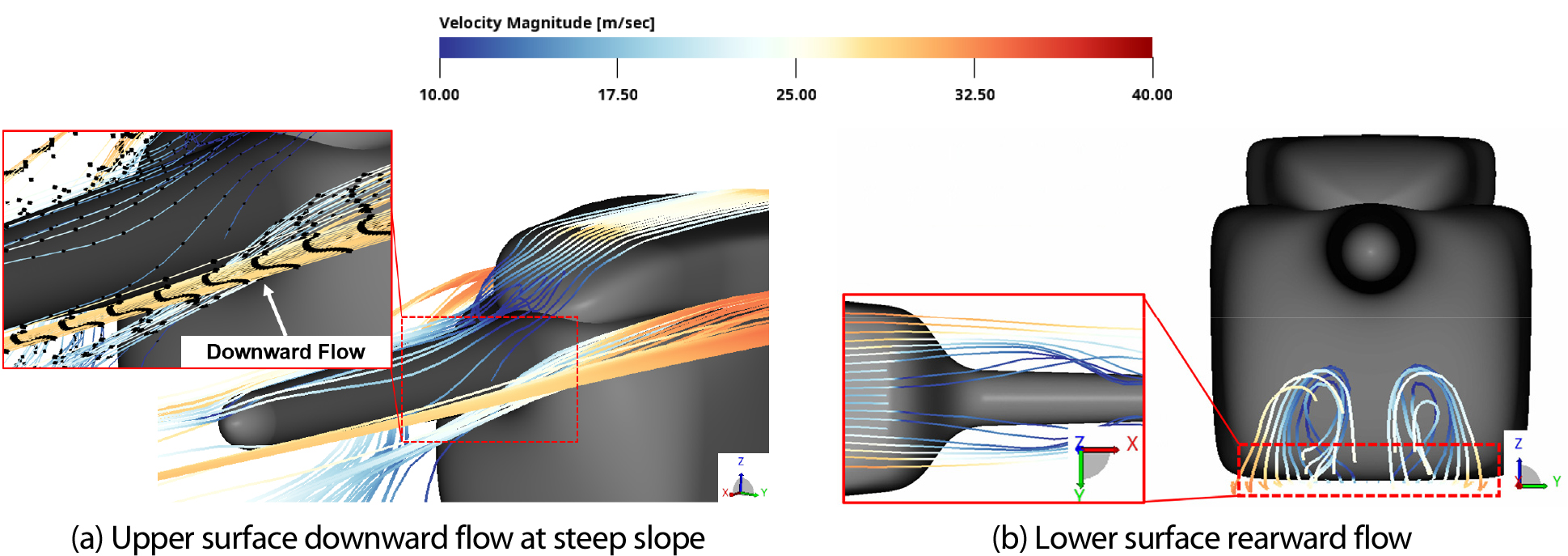
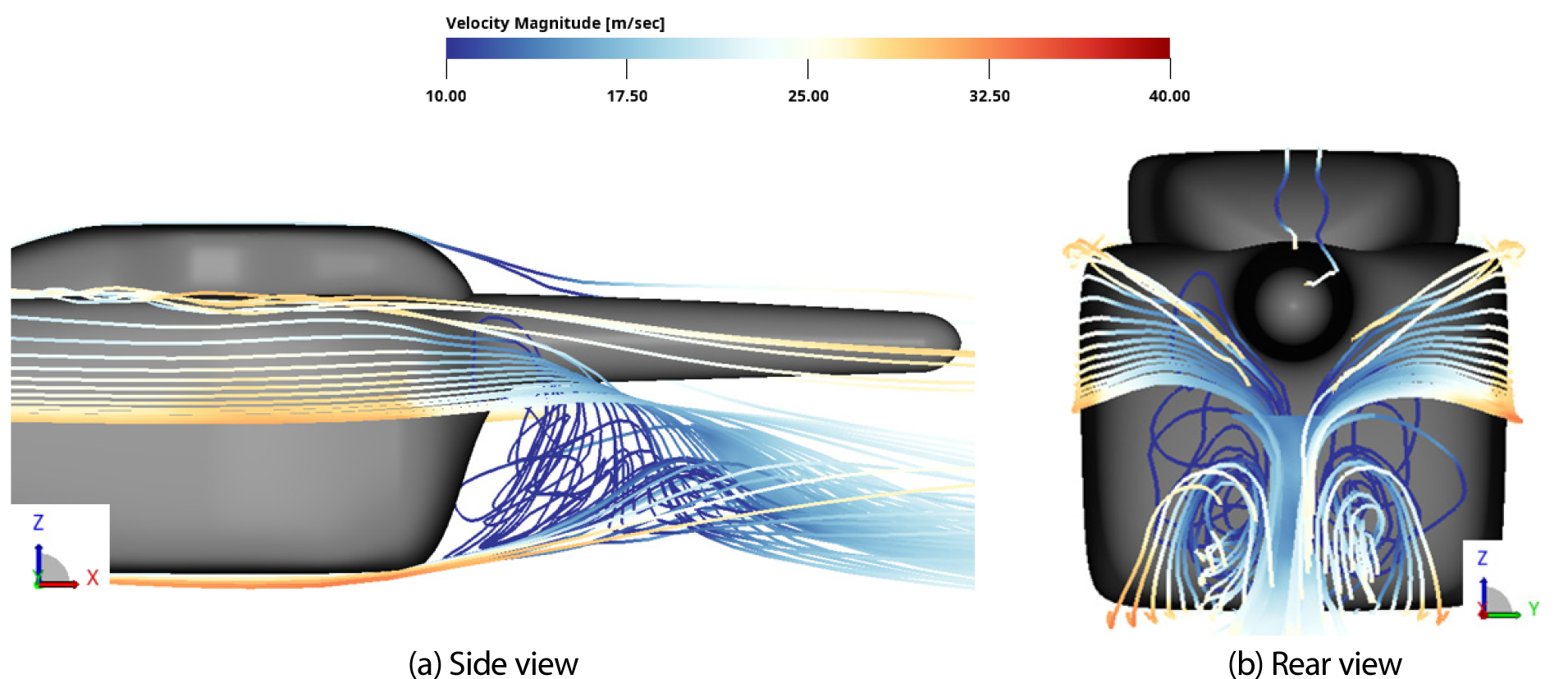
앞선 분석 결과에 따르면, 동체 상하부에서는 급격한 곡률을 가지거나 무딘 형상에서 유동 박리가 발생하는 것을 확인하였다. 본 절에서는 이러한 박리 유동이 동체 후방에서 상호 간섭하며 발달하는 유동 구조를 각각 유선 분포와 함께 Figs. 19, 20을 통해 분석하였다. Fig. 19(a)에서는 동체 상부의 엔진 카울링에서 발생한 박리 유동과 동체 상부 측면을 따라 발달한 유동이 후방 램프 구간의 급격한 곡률 변화로 인해 경사면을 따라 하부로 유도되는 현상이 관찰된다. 확대 그림은 화살표 기호를 통해 유선의 이동 경향을 제시하며, 이를 통해 상부 유동이 급격히 아래 방향으로 이동하면서 동체 하부 표면 근처로 유입되는 양상을 뚜렷하게 확인할 수 있다. 이후 해당 박리 유동은 그림에서 확인되는 바와 같이 테일 붐 하부까지 확산되며 하부의 박리 유동과 간섭할 것으로 판단된다. Fig. 19(b)는 동체 하부 영역의 유선 분포를 제시하고 있으며, 앞서 Section 5 분석에서 확인된 바와 같이 동체 하부의 박리 유동이 후방으로 확산되며 강한 와류 구조로 발달하는 양상을 확인할 수 있다. 이 유동은 벽면과의 상호작용이 약화된 상태에서 복잡한 회전 성분을 가지며, 동체 테일붐을 중심으로 큰 소용돌이 형태로 형성되었다. 이러한 상하부 유동의 결합 특성은 Fig. 20을 통해 보다 명확히 확인된다. Fig. 20은 상하부 유선 분포를 중첩하여 시각화하였으며, 동체 후방에서는 서로 다른 방향에서 유입된 박리 유동이 충돌하며 대규모 소용돌이 쌍(Vortex Pair)을 형성하는 특성이 관찰되었다. 이러한 박리된 유동 간의 간섭 현상은 동체 후방부의 압력 회복을 저해하여 압력 항력을 증가시킬 것으로 판단된다[14].
3.3 받음각 조건에 따른 동체 박리 지점 분석
3.3.1 받음각 조건에 따른 동체 상부의 박리 지점
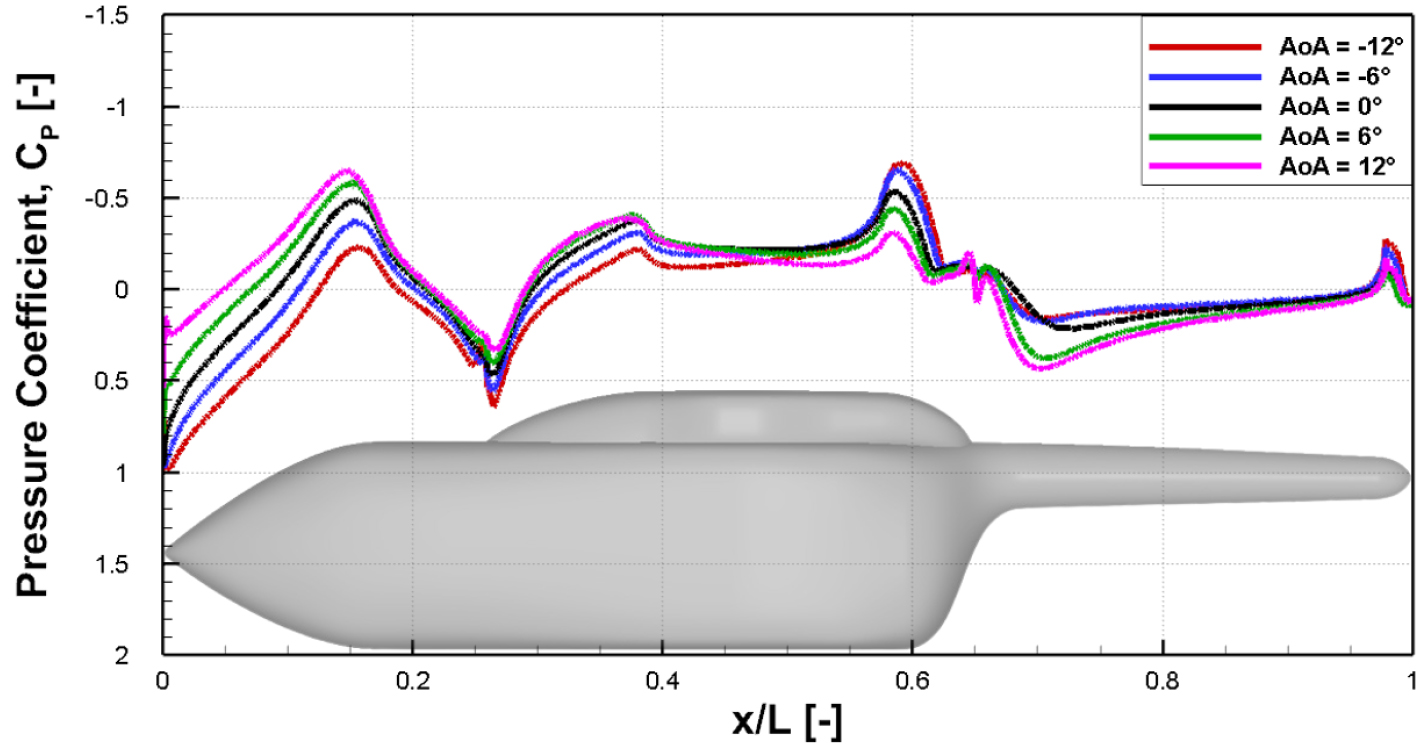
앞선 분석에서는 받음각이 0°일 때, 동체 상하부에 발생하는 대표적인 박리 유동 특성을 확인하였다. 그러나 실제 비행 환경에서는 차세대 회전익 항공기가 다양한 기동 조건에 노출되기 때문에, 받음각 변화에 따라 동체 표면의 박리 위치가 변하고, 이는 항력 특성에도 직접적인 영향을 미친다. 이에 따라 본 절에서는 받음각 변화에 따른 동체 표면의 박리 지점 이동 경향성을 정량적으로 분석하였다. 또한, 정체점의 이동 방향과 위치 변화가 상하부의 압력 구배를 달리 형성하여 박리 지점 변화 영향을 미치므로 함께 분석하였다. Fig. 21은 동체 상하 중심선을 따라 얻은 표면 압력 분포를 나타내며, 이를 통해 받음각에 따른 정체점 형성 위치와 박리 지점의 상대적 이동 경향성을 파악할 수 있다. 정체점은 양(+)의 받음각에서는 동체 하부에서, 음(-)의 받음각에서는 동체 상부에서 형성되며, 음, 양의 받음각 조건에서 받음각이 증가함에 따라 정체점의 위치는 상/하부 각각에서 점차 후방으로 이동한다. 또한 박리 지점의 경우 동체 후방 상부 표면의 압력 Plateau 구간인 x/L = 0.6 부근을 관찰하였을 때 받음각이 양의 방향으로 증가함에 따라 박리 지점이 전방으로 이동함을 확인할 수 있다. 동체 상부 표면의 박리 현상을 보다 정량적으로 파악하기 위하여, 카울링 후방에서 발생하는 박리 지점을 기준으로 설정하고 분석을 수행하였다. 받음각 0° 조건에서의 박리 지점은 x/L = 0.6189로 나타났으며, 기준 조건에서의 박리 지점 위치와 타 받음각 조건에서의 박리 지점 간 상대적인 이동 폭을 Δx 값으로 정의하여 Table 7에 정리하였다. 이때, 기준 조건보다 전방에서 박리 지점이 형성되는 값에 대하여 음(-)의 부호를 사용하여 Δx 값을 나타내었으며, 양(+)의 값의 경우 받음각 0° 조건의 박리 지점보다 지연된 위치에서 박리가 발생하였음을 의미한다. 받음각이 양의 방향으로 증가할수록 동체 상부에서의 박리 지점이 점차 전방으로 이동하였다. 받음각 6°에서는 x/L = 0.6142, 12°에서는 x/L = 0.6096 위치에서 박리가 발생하며, 이는 기준 조건 대비 최대 0.0093 (x/L)만큼 전방으로 이동한 결과이다. 이는 받음각 증가에 따라 정체점이 하부로 이동하면서 상부 전방에 고압 영역이 형성되었고, 이로 인해 역압력 구배가 강화된 결과로 해석된다.
박리 지점 이동은 Fig. 22에 제시된 표면 마찰 계수 분포에서도 확인할 수 있다. Fig. 22에 표시된 적색 선은 받음각 0° 조건에서 중심선 기준 박리 지점을 동체 스팬 방향을 따라 도시화한 것이다. 해당 선을 모든 받음각 조건의 동일한 지점에 적용하여, 박리 지점의 이동 특성을 비교하였다. 양의 받음각 조건에서는 받음각 증가에 따라 중심선 부근에서 표면 마찰 계수가 먼저 0으로 수렴하는 전방 박리 특성이 나타났으며, 이는 압력 구배의 강화로 인한 조기 분리로 해석된다. 반면, 모서리 인근에서는 끝단까지 일정 수준을 유지하여 비교적 안정적인 부착 유동이 지속되었다. 반면 음의 받음각 조건에서는 –12°, –6°에서 각각 동체 상부에서의 박리 지점이 x/L = 0.6295, 0.6238로 후방으로 이동하는 경향을 보였다. 이때는 정체점이 상부로 이동함에 따라 전방 압력 상승이 억제되고, 부착 유동 발달이 유지됨에 따라 동체 후방에서 박리가 유도되는 양상으로 해석된다. 이는 Fig. 22의 표면 마찰 계수 분포를 통해서도 확인할 수 있다. 음의 받음각에서는 중심선 부근보다 모서리 부근에서 조기 박리가 발생하고, 이후 중심선 방향으로 박리 영역이 확산되면서 전체 박리 영역이 확대되는 경향을 보였다. 이는 음의 받음각 조건에서는 동체 곡률 영향에 따라 유동이 빠르게 감속되고 전단력이 약화되어 국소적인 분리가 먼저 유도되었기 때문으로 분석된다.

Table 7.
Flow separation positions of upper surface depend on fuselage angle of attack
3.3.2 받음각 조건에 따른 동체 하부의 박리 지점
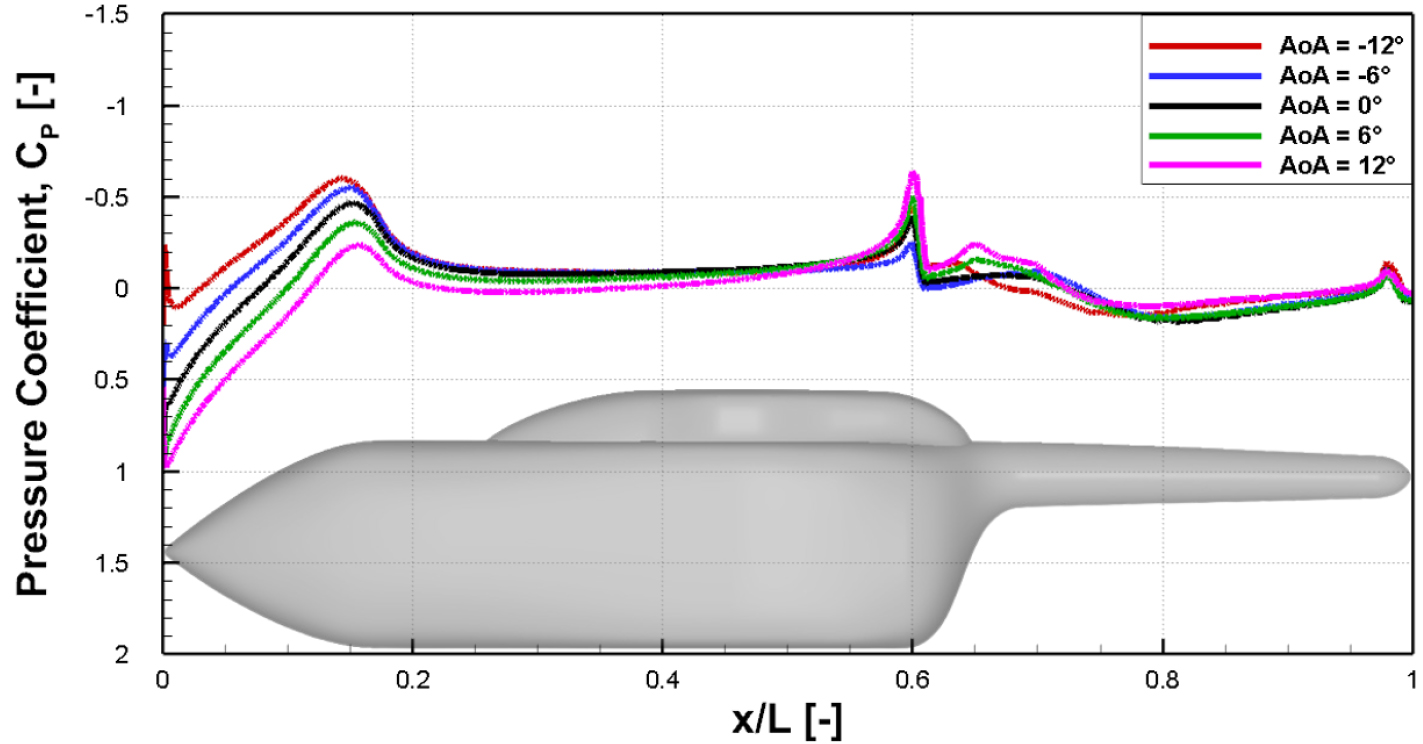
Fig. 23은 동체 상하부 중심선을 따라 얻은 표면 압력 분포를 나타내며, 앞서 3.3.1절에서 분석한 바와 같이 받음각에 따른 정체점 형성 위치와 박리 지점의 상대적 이동 경향성을 분석하였다. 음, 양의 받음각 각각에서 받음각이 증가함에 따라 정체점의 위치는 점차 후방으로 이동함을 확인하였다. 박리 지점은 압력 분포의 Plateau 구간인 x/L = 0.6 부근을 관찰하였을 때 양, 음의 받음각 모두에서 기준 조건 보다 박리 지점이 지연되는 것을 확인하였는데, -6° 조건의 경우 기준 조건보다 조기에 박리가 발생하였다. 이에 대한 정밀한 분석을 수행하기 위해 동체 하부 표면의 표면 마찰 분포와 중심선 기준 박리 지점의 정량적인 위치를 각 Table 8과 동체 하부 표면의 표면 마찰 분포를 나타내는 Fig. 24를 통해 정리하였다. 해당 그림 또한 앞서 Fig. 22에서 정의한 바와 같이, 받음각 0° 조건에서 중심선 기준 박리 지점을 적색 선으로 도시하여 받음각 0° 조건 대비 타 받음각 조건의 박리 지점 이동 특성을 분석하였다. 이때 Table 8의 경우 앞서 상부의 박리 지점을 제시한 것과 같이, 기준 조건에서의 박리 지점과 타 받음각 조건의 박리 지점의 이동 폭인 Δx/L을 받음각 별 박리 지점, 정체점과 함께 정의 하였다. 이때 Δx/L 값의 부호는 박리 지점의 전, 후방으로의 이동에 대하여 각각 양(-), 음(+)의 값으로 나타내었다.
먼저 기준 받음각 조건인 받음각 0°에서는 x/L = 0.6103 지점에서 박리가 시작되었으며, 이를 기준으로 각 조건에서의 변화를 비교하였다. 받음각이 양의 방향으로 증가할수록 하부 표면의 박리 지점은 점차 후방으로 이동하는 경향이 확인되었고, 받음각 6°, 12°에서는 각각 x/L = 0.6116, 0.6127에서 박리 지점이 형성되는 것이 관찰되었다. 이러한 현상은 Fig. 23의 압력 분포에서도 나타나듯이, 받음각 증가에 따라 정체점이 하부로 이동하면서 전방에 고압 영역이 형성되고, 이로 인해 역압력 구배가 완화되었기 때문으로 해석된다. 반면 음의 받음각에서는 서로 다른 경향이 관찰되었다. –6° 조건의 경우 기준 조건 대비 박리 지점이 0.0011 (x/L) 만큼 전방으로 이동하였으며, –12° 조건에서는 0.0031(x/L) 만큼 지연된 위치에서 유동 박리가 발생하였다. 해당 상이한 거동(박리 지점의 전/후방 이동 경향성)에 대한 정밀한 분석을 수행하기 위하여 –9°와 –16° 조건을 추가적으로 분석하였다. 그 결과 박리 지점은 각각 x/L = 0.6119와 0.6161로 나타났고, 이때 항력 계수는 –9°에서 0.0036, –16°에서 0.0059로 산출되었다. 이를 통해 음의 받음각 조건에서는 전체적으로 박리 지점이 지연되는 경향을 확인할 수 있었다. 다만 –6° 조건에서는 박리 지점이 전방으로 이동하는 예외적 결과가 관찰되었으며, 이때 항력 역시 기준 조건 대비 낮게 측정되었다. 이는 저 받음각 조건에서 국소적인 조기 박리만 발생하여 와류 구조가 약하게 형성되고, 압력 회복이 원활해진 결과로 해석된다. 이러한 해석 결과는 Fig. 24에서 확인되는 후미 유동 구조의 변화와도 일관된 경향을 보인다. 특히, 받음각 –6° 조건에서는 Tail boom을 따라 유입된 유동이 후방 램프 구간으로 전달되면서, 박리 직전 영역(적색 선 직전)에서의 표면 마찰 계수 증가가 다른 받음각 조건에 비해 상대적으로 완만하게 나타난다. 이는 램프 구간 코너 이후 형성되는 후미 와류 구조 역시 급격하게 발달하지 않고, 비교적 완만한 형태로 형성된다. 결과적으로, –6° 조건에서는 후류 구조의 강도가 감소하고 압력 회복이 보다 원활하게 이루어지는 것으로 해석된다. Fig. 4 및 Fig. 5에서 관찰한 것과 같이, 이러한 박리 완화 경향은 받음각 –6° 조건에서 실험 결과와 전산해석 결과 간 상대 오차가 낮게 나타난 원인이다. 종합적으로, 상하부 박리 지점의 변화 경향을 통합적으로 고찰하면 다음과 같다. 양의 받음각에서는 상부에서 박리가 조기에 발생하고, 하부에서는 후방으로 지연되는 양상이 나타났으며, 반대로 음의 받음각에서는 상하부 모두에서 박리 지연이 관찰되었다. 특히 하부 표면에서의 박리 지점 이동 폭은 상부보다 제한적이었으며, 항력 변화보다는 후류 구조 및 압력 분포 변화에 기여하는 간접 효과로 작용한 것으로 판단된다.
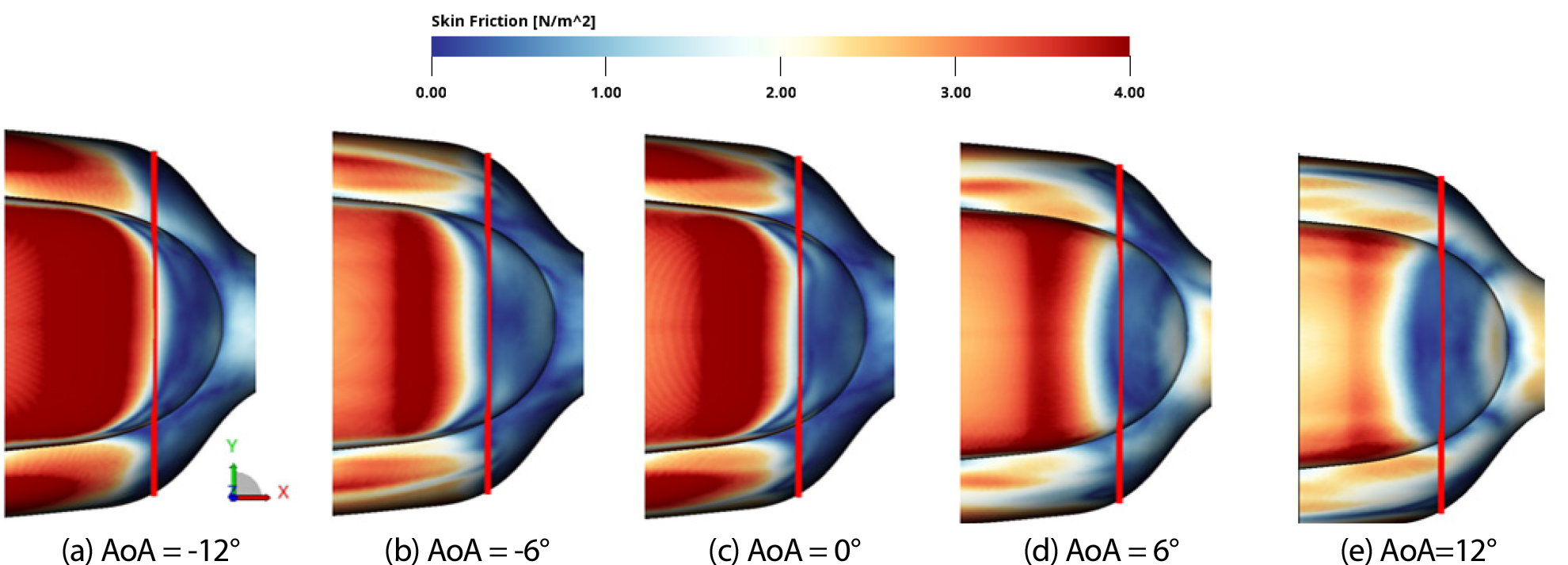
Table 8.
Flow separation positions of lower surface depend on fuselage angle of attack
4. 결 론
본 연구에서는 회전익 항공기의 단일 동체 형상을 대상으로 상하부 표면에서 발생하는 유동 박리 특성과 이에 따른 항력 변화를 전산해석을 통해 체계적으로 분석하였다. 해석 기법으로는 LBM 기반 PowerFLOW를 적용하였으며, 건국대학교 풍동 시험 데이터를 활용하여 수치해석 결과의 신뢰성을 검증하였다. 연구는 받음각 –12°, –6°, 0°, 6°, 12° 조건에서 수행되었으며, 표면 마찰 계수 분포를 이용해 박리 발생 지점을 확인하고, 유선 분포를 통해 동체 상하부 후류 구조와 간섭 현상을 파악하였다. 분석 결과, 동체 상부의 엔진 카울링과 하부의 램프 구간에서는 모두 역압력 구배로 인해 유동 박리가 발생하였다. 특히 상부 표면은 양의 받음각 증가에 따라 박리 지점이 점차 전방으로 이동하여 조기 박리가 발생하였으며, 반대로 하부 표면에서는 박리 지점이 후방으로 지연되는 특성이 확인되었다. 음의 받음각 조건에서는 상하부 모두 박리 지점이 지연되는 경향을 보였으나, –6° 조건에서는 하부 박리 지점이 전방으로 이동하고 항력이 0° 조건 대비 낮아지는 예외적인 결과가 관찰되었다. 이는 특정 지점에서의 조기 박리보다는 상하부 박리 유동의 간섭이 항력 변화에 지배적인 역할을 하는 것을 의미한다. 실제로 동체 후방에서 상하부 박리 유동이 간섭하여 대규모 와류 쌍을 형성하였고, 이로 인해 압력 회복이 지연되면서 압력 항력이 증가하는 현상이 확인되었다.
본 연구에서 사용된 동체 형상은 후방 램프 구간에서 비교적 큰 경사각을 가지므로, 일반적인 고속 회전익기 동체 형상과는 차이가 있다. 그러나 이는 동체 후방에서 발생하는 유동 박리와 그에 따른 항력 변화를 명확하게 분석하기 위한 실험적인 모델이기 때문이다. 비록 해당 형상이 실제 고속 회전익기 형상을 직접적으로 활용되진 않겠지만, 받음각 변화에 따른 박리 지점 이동과 압력 회복 특성 등 본 연구에서 도출된 물리적 분석은 후방 동체에서 발생하는 항력 생성 메커니즘을 이해하는 데 유의미한 물리적 근거를 제공한다. 특히, 이러한 경향은 고속 회전익기에서 중요한 항력 저감 설계의 기초 자료로 활용될 수 있을 것으로 기대된다.
