

1. 서 론
2. CFD 방법론
2.1 DrivAer Fastback 모델 및 계산 영역
2.2 격자 생성 기법
2.3 난류 모델 및 경계조건
3. 해석 결과 및 고찰
3.1 격자 스터디 및 검증
3.2 횡풍 조건 효과
4. 결 론
1. 서 론
최근 자동차 산업에서는 연료 효율성과 성능 향상을 위한 공기역학적 설계의 중요성이 점차 강조되고 있다. 특히, 횡풍(Side wind)과 같은 복잡한 환경 조건에서 자동차의 공기역학적 성능을 이해하는 것은 차량의 안정성과 에너지 효율성을 높이는 데 필수적이다. 기존의 연구들은 주로 단순화된 자동차 모델을 사용하여 공기역학적 특성을 분석하였으나[1, 2], 이는 실제 차량에 대한 적용에 한계가 있었다. 이러한 문제를 해결하기 위해 보다 현실적인 모델이 필요하며, 특히 DrivAer 모델[3, 4]은 자동차의 공기역학적 성능 예측에 있어 중요한 역할을 한다.
선행 연구에서는 notch back 형상에 대해 격자 재분할이 자동차 공기역학적 특성에 미치는 영향을 수행하였으며[5], Aultman[6] 등은 notchback 과 fastback 형상에 대해 RANS, URANS, DDES 방법론을 통해 DrivAer 모델의 공기역학적 성능을 예측하였다. Wieser[7] 등은 DrivAer 모델의 1:4 축소된 모형을 이용하여 다양한 횡풍 조건에서 풍동 실험을 수행하였다. 횡풍 조건은 주행 중인 차량에 추가적인 항력과 양력을 발생시켜 운전의 안정성에 영향을 미칠 수 있으며, 고속 주행 시 더욱 큰 영향을 미친다[8, 9]. 이에 따라 횡풍 조건에서 자동차의 공기역학적 특성을 분석하는 연구는 차량 설계 및 안정성 개선에 중요한 기여를 할 수 있다.
본 연구에서는 전산유체역학(Computational Fluid Dynamics, CFD) 기법을 활용하여 다양한 순풍(Head wind) 조건 및 횡풍 조건에서 실제 풍동 실험 결과와의 비교를 통해 CFD 기법의 유효성을 검증하고, 격자 구성의 영향을 분석하고자 한다. 자동차 공기역학적 특성의 정확한 예측에 있어 격자 구성의 세밀함이 중요한 요소로 작용한다. 격자 크기와 분포가 적절하지 않으면, 유동의 세부 구조를 정확히 포착하지 못하여 시뮬레이션 결과의 정확도가 떨어질 수 있다. 특히, 차량 주변과 같은 복잡한 형상에서는 격자 분할이 유동 예측에 미치는 영향이 매우 크므로, 정확한 격자 설정을 통해 유체의 흐름을 보다 정밀하게 해석할 필요가 있다. 이러한 이유로 본 연구는 격자 재분할과 격자 세분화가 공기역학적 특성에 미치는 영향을 체계적으로 분석하고, 효율적인 격자 설정이 시뮬레이션 정확도와 계산 효율성을 어떻게 최적화할 수 있는지에 대해 구체적으로 연구하고자 한다.
본 연구는 특히, 자동차 주변 영역에서의 격자 세분화가 공기역학적 특성에 미치는 영향을 분석하고, 효율적인 격자 구성을 제시하는 데 중점을 둔다. 또한, 다양한 횡풍 각도 조건에서 항력계수(Drag coefficient, CD) 및 양력계수(Lift coefficient, CL)를 측정하여, 실제 풍동 실험과 비교함으로써 보다 정밀한 공기역학적 예측을 목표로 한다.
2. CFD 방법론
2.1 DrivAer Fastback 모델 및 계산 영역
단순화된 차량 모델은 기본적인 유동 특성을 파악하는 데 유용하지만, 휠, 휠하우스, 사이드 미러 등과 같은 복잡한 형상에 대한 공기역학적 특성은 충분히 반영하지 못하는 한계가 있다. 이러한 한계를 극복하기 위해, 뮌헨 공과대학교(TUM)에서는 현실적인 일반 차량 모델인 DrivAer 모델이 개발되었다[10, 11]. DrivAer 모델은 BMW 3 시리즈와 Audi A4의 디자인을 결합한 모델로, 해당 모델은 Fig. 1과 같이 Notchback, Estateback, Fastback 등 후방 형상에 따라 다양한 버전으로 나뉜다. 또한, 차량 하부 형상에 따라 Detailed underbody와 Smooth underbody 타입으로 구분할 수 있다.
본 연구에서는 OpenFOAM V10을 사용하여 Reynolds Averaged Navier-Stokes(RANS) 시뮬레이션을 수행하였다. 차량 모델은 Fastback rear 타입의 DrivAer 모델[10, 11]을 사용하였으며, 차량 하부 형상으로 Detailed underbody를 사용하여 시뮬레이션을 수행하였다. Fig. 2(a)는 본 연구에서 사용된 전체 스케일의 DrivAer fastback 모델을 나타내며, (b)는 계산 영역 및 경계조건을 나타낸다. 본 연구에서 사용된 DrivAer fastback 모델의 전장(L)은 4.613 m, 전폭(W)은 1.753 m, 전고(H)는 1.418 m를 사용하였다. 그러나 Heft[12] 등은 1:2.5 비율로 축소된 DrivAer 모델을 40 m/s의 일정한 유속에서 풍동 실험을 수행하였다. 해당 실험에서 축소된 차량 길이를 기준으로 레이놀즈수는 4.87×106이며, 무차원 상사를 일치시키기 위해 시뮬레이션 도메인의 입구에서 16 m/s의 유속을 적용하였다.
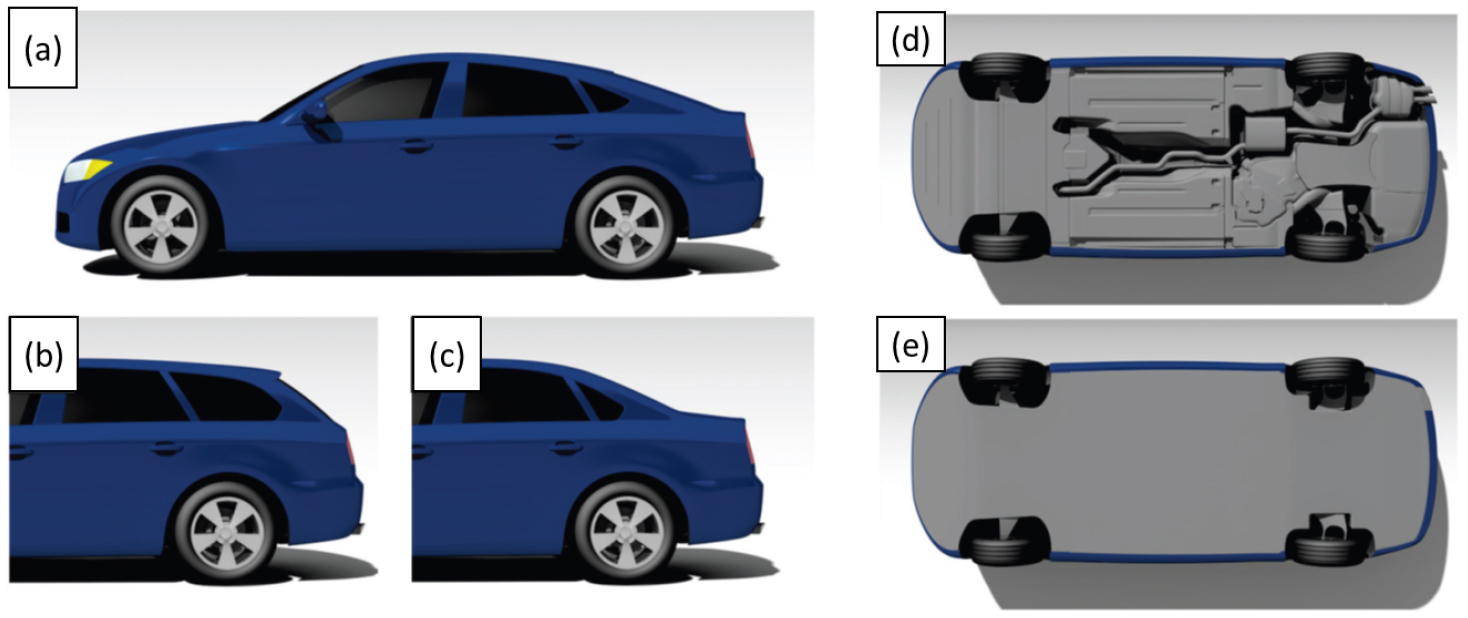
Fig. 1.
Various configurations of DrivAer models: (a) fastback, (b) estateback, (c) notchback, (d) detailed floor, (e) smooth floor[12]
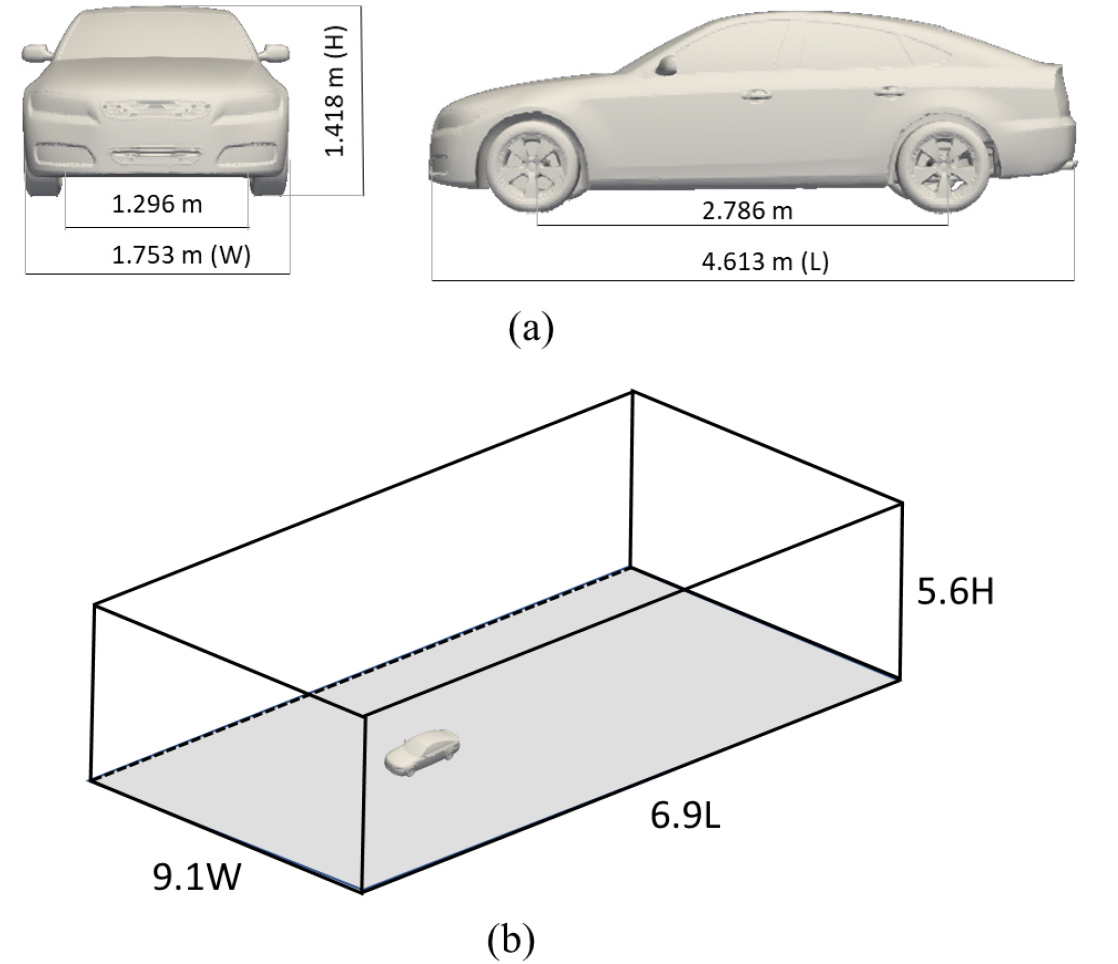
계산 영역 크기는 유동장이 완전히 발달하고, 수치적 안정성을 보장하며, backflow의 영향을 최소화할 수 있도록 설정해야 한다. 후류 영역의 크기는 후류의 충분히 발달할 수 있을 정도로 충분한 크기로 설정해야 하며, 다양한 연구에서 후류 영역의 크기는 주로 3 L에서 7 L 사이로 사용되고 있다[12, 13, 14, 15]. 또한, 후류 영역의 크기는 차단비(blockage ratio)의 영향을 받는다. 차단비란 유체 흐름에서 물체가 차지하는 비율을 나타내는 지표로, 차량 시뮬레이션에서는 차량의 전면 면적과 계산 영역에서의 유속 방향 단면적의 비율로 정의된다. 선행 연구에서는 차량이 개방된 공기 환경에서의 주행 상황을 모사하기 위해 차단비는 0.015로 매우 작은 값을 갖도록 설계되었다. 차단비가 충분히 작은 경우, 물체가 유동에 미치는 영향이 적기 때문에 상대적으로 더 작은 후류 영역 크기를 설정할 수 있다[13].
본 연구에서 계산 영역의 입구는 차량 모델의 전방 2.6 L 지점에 위치하도록 설계하였으며, 출구는 전방으로부터 4.3 L 지점에 위치하도록 설정하였다. 속도 결손(velocity deficit, Us)의 관점에서 4.3 L과 7 L의 후류 영역의 크기를 비교하면 Us의 변화에 따라 후류 영역의 크기가 적합한지 확인할 수 있다. 속도 결손은 유체 흐름에서 물체에 의해 유속이 감소하는 정도를 나타내는 척도로, 자유 흐름 속도와 후류 속도간의 차이로 정의된다. 속도 결손은 후류 영역의 크기 x–2/3에 비례하여 변한다고 알려져 있다[16]. 4.3 L과 7 L에서의 속도 결손의 차이는 약 0.1 정도로, 후류에서의 유속 차이가 약 10% 정도 발생할 것으로 예측할 수 있다. 더 긴 유출구 길이가 바람직하지만, 계산 자원의 제한과 계산 시간 최적화를 고려하여 현재 설정을 적용하였다. 또한, 선행 연구에서 유사한 유출구 길이를 적용하여 Notch back 및 Estate back 모델에 대한 검증이 수행되었으며[5, 13], 해당 연구에서는 수치적 안정성 및 공력 특성을 충분히 보장하는 것을 확인하였다. 이를 바탕으로, 본 연구에서도 유사한 크기의 입구와 출구 위치를 적용하였다.
2.2 격자 생성 기법
본 연구에서는 OpenFOAM의 내장 함수(Blockmesh)를 사용하여 격자를 생성하였으며, 선행 연구에서 수행한 격자 재분할 기법[5]을 사용하였다. Fig. 3의 R0 영역은 계산 영역 전체를 나타내는 배경 격자를 의미하며, 차량 주변 유동 특성을 관측하기 위해 R1, R2와 같이 더 세밀한 격자를 배치하도록 하였다. 또한, 차량과 인접한 영역에서의 유동 특성은 복잡해지므로, R3, R4와 같이 차량 형상을 갖는 영역을 설정하여 더 세밀한 격자를 배치할 수 있도록 하였다. 마지막으로 복잡한 차량 하부, 후류 영역과 지면 효과를 관측하기 위해 각각 Underbody Block(UB), Wake Block(WB), Ground Block(GB) 영역을 격자 재분할 영역을 설정하였다. 지표면과 차량은 No slip 조건이므로, 이에 의한 경계층 효과를 관측하기 위한 프리즘 레이어를 추가하였다. Table 1은 이러한 격자 재분할 영역 정보를 요약한 것이다. 또한, 본 연구에서는 차량 주위의 경계층 해석을 수행하기 위해 SST k-ω 모델에 주로 적용되는 y+ 값인 30과 300 사이로 목표를 설정하였으며[17], 프리즘 레이어 개수는 4개, 격자의 첫 번째 경계층은 6.25 mm인 차량 길이의 0.14% 수준으로 설정하였다. 그 결과, 조밀하지 않은 격자의 경우 평균 y+는 약 97, 조밀한 격자의 경우 평균 y+ 는 약 26 정도를 가지는 것을 확인하였다. 자세한 격자 정보는 3.1 절에서 제시하도록 한다.
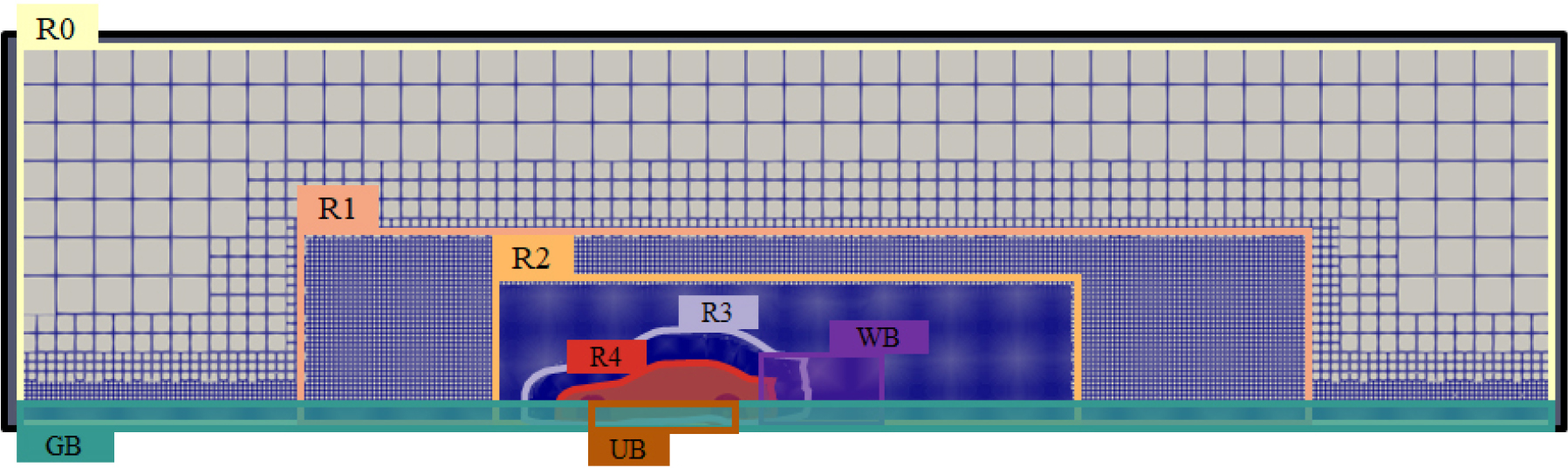
Table 1.
List of shapes and sizes of the grid refinement regions[5]
2.3 난류 모델 및 경계조건
본 연구에서는 Reynolds-Averaged Navier-Stokes(RANS) 방정식을 해석하기 위해 Shear Stress Transport(SST) k-ω 모델[17]을 사용하였다. SST k-ω 모델은 k-ε 모델의 강점과 k-ω 모델의 강점을 결합하여 점성 표면 근처의 유동 특성을 더욱 정밀하게 예측할 수 있다. 특히, SST k-ω 모델은 경계층에서의 유동 분리를 정확하게 포착할 수 있어, 복잡한 유동 해석 문제에서 활발히 사용되고 있다[18, 19, 20]. RANS 방정식을 사용하면 유동장의 시간에 따른 평균 속도 필드를 예측할 수 있으며, 이는 다음과 같다.
여기서 는 시간 평균 속도 성분을, 는 시간 평균 압력, 𝜈는 동점성계수를 나타낸다. 마지막 항인 는 레이놀즈 응력 항으로, 난류로 인한 운동량 수송을 나타낸다. 레이놀즈 응력 항을 모델링하기 위해 난류 점성계수 를 사용하여 다음과 같이 표현할 수 있다.
여기서 k는 난류 점성 계수 를 계산하기 위해 SST k-ω 모델을 사용하였다. SST k-ω 모델은 난류 운동에너지(Turbulence kinetic energy, k)와 특정 소산율(Specific dissipation rate, ω)의 두 개의 수송 방정식을 사용하며, 난류 운동에너지와 특정 소산율을 구하기 위한 수송 방정식은 다음과 같다.
이러한 SST k-ω 모델은 경계층 내부와 외부의 유동을 효과적으로 예측할 수 있으며, 특히 유동 박리가 발생하는 영역에서 뛰어난 예측 성능을 가진다. 본 연구에서 사용된 SST k-ω 모델은 오픈소스인 OpenFOAM V10을 사용하였으며, 격자 스터디 및 횡풍 조건 시뮬레이션에 적용되었다.
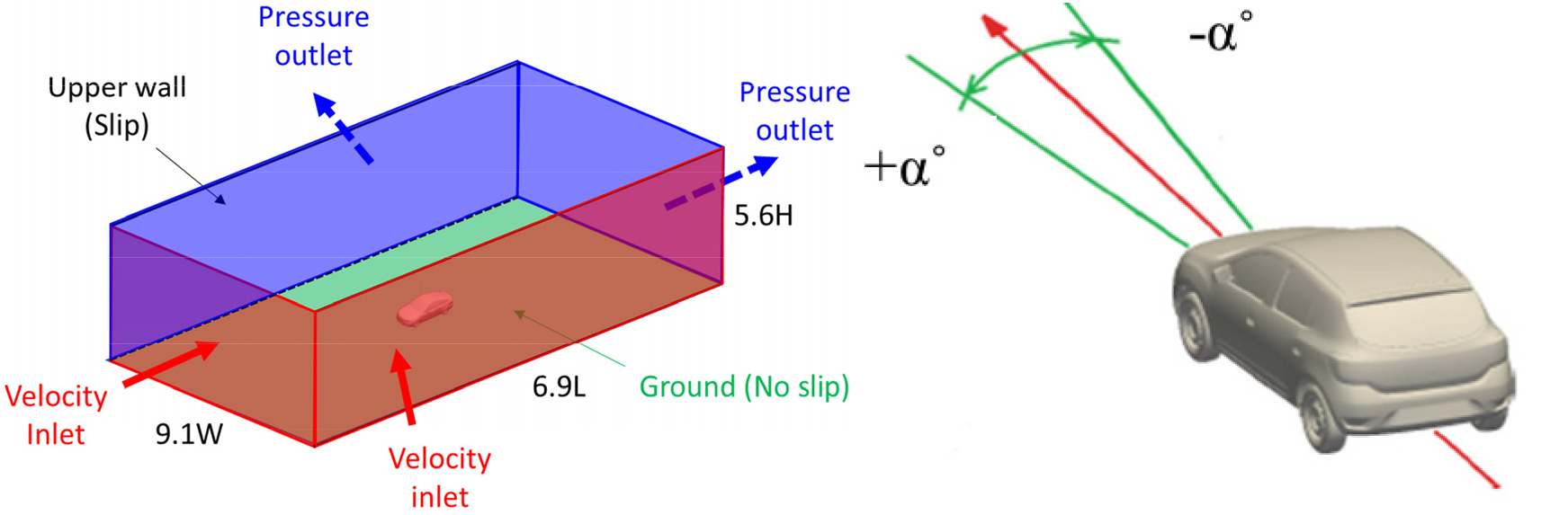
시뮬레이션의 경계조건은 차량의 속도와 동일한 유속 입구 조건, 출구에서는 일정한 압력 조건을 사용하였다. 상단 벽면은 점성의 효과를 무시하기 위해 Slip 조건을 사용하였고, 지면은 마찰 효과와 차량이 움직이는 효과를 고려하기 위해 Moving ground 조건을 사용하였다. 또한, 측면 벽에서 횡풍 조건을 고려하기 위해 Fig. 4의 좌측과 같이 각각 속도 조건과 일정한 압력 조건을 설정하였다. 횡풍 조건이란 차량이 주행 중일 때 차량 측면에서 수평 방향으로 불어오는 유동을 의미한다. 즉, 차량이 주행하는 방향과 수직인 방향에서 발생하는 유동을 의미하며 차량의 주행 방향과 횡풍의 방향 사이의 각도를 횡풍 각도라고 하며 이에 대한 그림을 Fig. 4 우측에 나타내었다.
3. 해석 결과 및 고찰
3.1 격자 스터디 및 검증
본 연구에서는 차량 공기역학적 특성을 정확하게 예측하기 위해 다양한 격자에 따른 민감도 분석을 수행하였다. 이를 통해 격자 크기가 해석 결과에 미치는 영향을 정량적으로 평가하고, 최적의 격자 구조를 결정하고자 하였다. 먼저, 격자 재분할 효과를 검증하기 위해 Table 2와 같이 재분할 영역의 크기를 변화시켜 가며 격자 스터디를 수행하였다. 격자 스터디는 배경 격자 영역인 R0 크기에 따라 A, B, C로 구분하였다. A, B, C 영역은 각각 800 mm, 400 mm, 200 mm의 배경 격자를 갖도록 격자를 구성하였으며, 차량 길이에 대해 17%, 8%, 4% 에 해당하는 격자 크기이다. 격자 재분할 영역에 대한 격자 크기를 차량의 길이로 정규화한 표를 Appendix A에 추가하였다. R0에서 R4까지 여러 단계의 재분할 영역을 설정하여 진행되었으며, 각 케이스에 대해 차량 주변의 R3 및 R4 영역에서 더욱 세밀한 격자를 적용하였다. 이러한 접근 방식은 차량 주변의 복잡한 유동 특성을 보다 정확하게 포착하는데 도움이 된다.
Table 2.
List of the grid sizes in the refinement regions
Fig. 5는 각 케이스에 대한 항력계수와 양력계수의 시뮬레이션 결과를 Wieser[7]의 실험 데이터와 비교한 것이다. 실험 데이터는 1:4로 축소된 DrivAer fastback 모델을 사용하였으며, 유속 41 m/s 및 Re = 3.2×106에서 풍동실험이 수행되었다. 따라서, 본 연구의 시뮬레이션의 경우 전체 스케일의 DrivAer fastback 모델을 사용하였으므로, 상사성을 일치시키기 위해 실험에서 사용된 유속의 1/4인 10.25 m/s를 사용하였다. 또한, 배경 격자 크기에 따라 A, B, C 영역을 나누어서 표현하였다. A, B, C 영역은 각각 6개, 2개, 1개의 케이스에 대해 격자를 생성하였다. A 영역 중 A4와 A6 케이스는 격자를 약 1억 5천만 개가 사용되었고, 그 외의 케이스에서는 약 4천만 개에서 5천만 개의 격자가 사용되었으며, 이를 Fig. 5에 나타내었다. 격자 수가 5천만 개인 경우 평균 y+ 값은 97, 1억 5천만 개인 경우는 26으로 나타났으며, 이는 목표 범위인 30에서 300 사이의 y+ 값을 만족하였다.
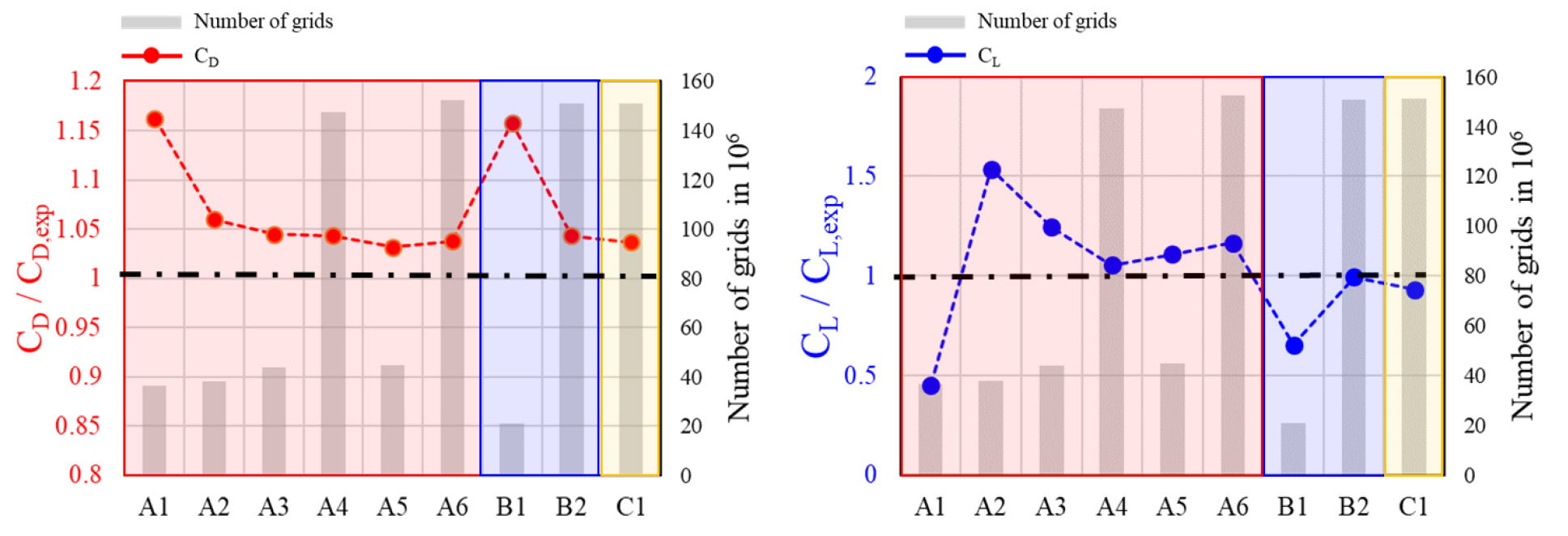
Fig. 5.
Comparison of the drag and lift coefficients from the grid study with experimental data[7] at u=10.25 m/s and Re=3.2×106
격자 크기에 따른 공력계수 예측 정확도는 주로 경계층과 후류의 정밀한 유동 해석의 차이에 의해 달라진다. 자동차 주변의 격자 해상도가 증가하면, 경계층과 후류가 더 정확하게 모델링될 수 있어, 유동의 변화가 더 세밀하게 반영할 수 있다. 이는 항력계수와 양력계수 예측에 직접적인 영향을 미친다. 특히, A2와 A3 케이스를 비교한 결과, R3 영역과 R4 영역의 격자 세분화가 항력계수와 양력 계수의 정확도를 향상 시킨다는 것을 알 수 있다. 자동차 주변 영역인 R3, R4 영역이 항력계수와 양력계수를 예측하는 데 중요한 역할을 하기 때문에 해당 영역의 격자를 세분화하는 것이 중요하다. A, B, C 케이스 모두 격자수가 증가할수록 항력계수와 양력계수의 정확도가 향상되는 것을 확인하였다. 항력계수의 경우, 공통적으로 R3 영역의 격자 크기가 차량 대비 0.5% 크기(25 mm) 이하인 케이스에 대해서 정확도가 높게 나타났다. 이는 이전에 설명한 공력계수가 달라지는 원인으로 자동차에 작용하는 항력이 차량 주변 유동에 민감하기 때문이다. 세밀한 격자는 경계층의 발달을 보다 정확히 예측할 수 있으며, 후류와 차량 표면의 유동을 세밀하게 해석할 수 있다. 양력계수의 경우, A4, B2, C1 격자를 사용하였을 때, 정확도가 높게 나타났으며, 전반적으로 지면 근처에서의 격자인 GB 영역의 격자 크기에 더 민감한 결과를 보이는 것을 확인하였다. 이는 지면 근처와 차량 하부의 복잡한 유동을 보다 잘 포착할 수 있기 때문이다. GB 영역에서의 격자 크기 변화가 양력계수에 민감한 결과를 보였다는 것은 지면 효과와 차량 하부 유동이 양력에 큰 영향을 미친다는 것을 의미한다. 세밀한 격자는 하부 유동을 보다 정확히 추적하고, 지면 효과에 의한 유동 변화를 정확하게 반영할 수 있다.
차량 시뮬레이션에서 항력이 주로 주행 저항의 요소로 작용하는 반면, 양력은 상대적으로 크기가 작다. 이에 따라 시뮬레이션에서 작은 오차가 상대적으로 크게 나타나는 현상이 발생할 수 있다. 이러한 이유로, 정확한 결과를 검증하기 위해 비교적 양력계수가 잘 일치하는 A4, A5, B2, C1 케이스를 선택하여, 차량 표면의 압력계수를 Heft[10] 등의 실험 데이터와 비교하였다. 실험 데이터는 1:2.5 축소된 DrivAer fastback 모델을 사용하여 유속 40 m/s 및 Re = 4.87×106에서 풍동실험을 통해 얻은 것이다. 따라서, 본 연구에서는 1:1 모델을 사용하였으며, 상사성 변수인 레이놀즈수를 고정했으며, 유속은 실험값의 1/2.5 크기인 16 m/s의 유속을 사용하였다.
Fig. 6은 차량의 중심선에서 표면의 압력계수를 비교한 것으로, (a)는 차량 상단 표면의 압력계수를, (b)는 차량 하단 표면의 압력계수를 나타낸다. 해당 결과는 시뮬레이션의 마지막 iteration에서 얻은 것이며, 스케일 보정을 위해 가로축은 차량 길이에 대해 정규화하였다. 그 결과, 모든 격자 케이스에서 차량 상단 표면 및 하단 부분의 압력계수는 실험 데이터와 대체로 잘 일치하는 것을 확인하였다. 하단 표면의 경우, 차량 전면과 후면에서 시뮬레이션 결과가 실험 데이터와 거의 일치하였으나, 중심 부분에서는 압력계수의 진동에 의한 오차가 크게 나타났다. 이러한 오차는 detailed underbody 형상의 복잡성에 기인한 결과이며, 가로 방향(Spanwise) 변형이 압력계수의 분포에 영향을 미친다고 할 수 있다. 따라서, detailed underbody의 기하학적 복잡성으로 인한 유동 분리가 주된 원인이 된다. 유동 분리 후에는 후류 영역에서 유동의 불안정성이 커져 비정상적인 유동이 발생하며, 이는 압력계수의 변동으로 이어지게 된다. 이러한 압력계수 진동 현상은 smooth underbody 형상에서는 발생하지 않는 것으로, 선행 연구에서 이미 다루어진 바 있다[21].
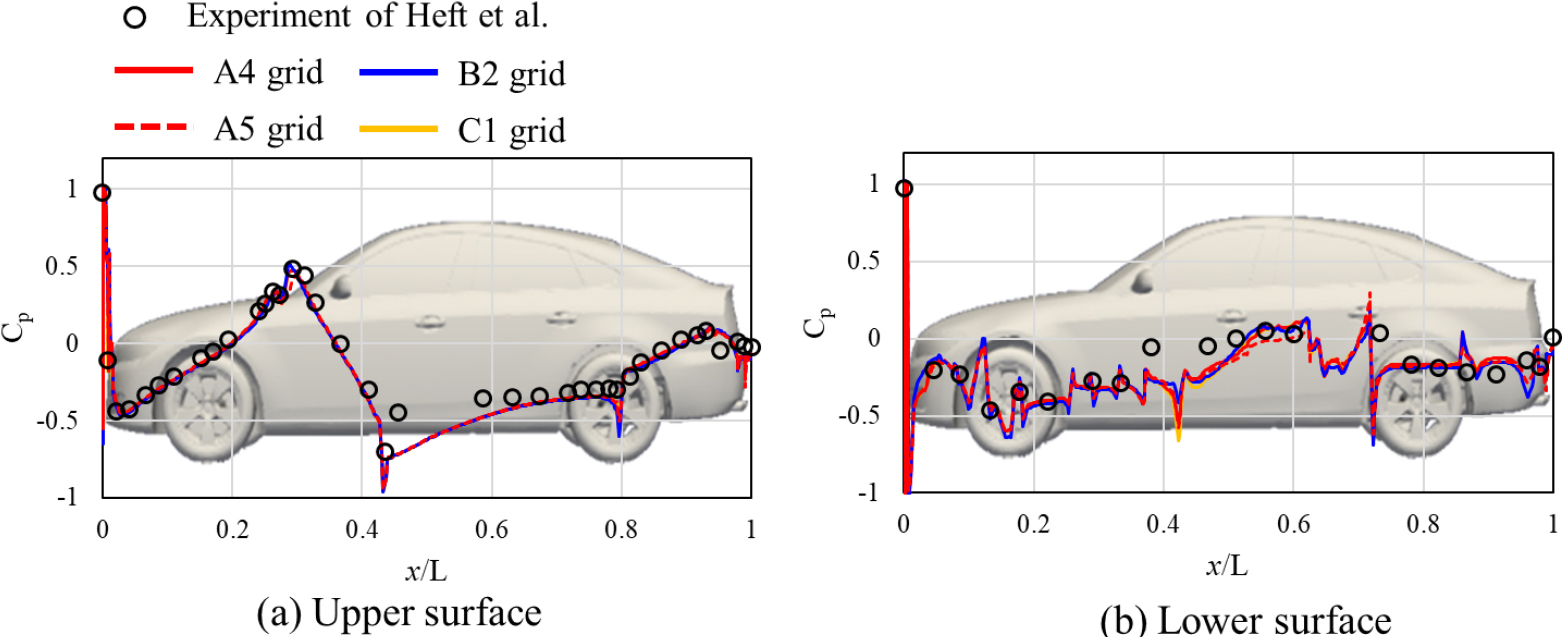
Fig. 6.
Comparison of the pressure coefficient on the DrivAer fastback model with experimental data[10]: (a) on the upper surface, (b) on the lower surface at u=16 m/s, Re=4.87×106
3.2 횡풍 조건 효과
본 연구에서는 격자 스터디 내용을 이용하여, 최적의 격자로 판단되는 A4, A5, B2, C1 케이스에 대해 횡풍 조건에서의 차량 공기역학적 특성을 분석하였다. 차량의 측면에서 작용하는 일정한 속도의 횡풍 유속을 설정하고, 차량에 작용하는 항력계수 및 양력계수를 실험 데이터와 비교하였다. Fig. 7의 왼쪽 그래프는 선정된 케이스들의 항력계수가 횡풍 각도에 따라 어떻게 변하는지를 나타내며, 오른쪽 그래프는 동일한 각도에서 양력계수의 변화를 보여준다. 각도는 0°에서 10°까지 2° 간격으로 변화시켜 가며 양력계수와 항력계수를 측정하였으며, 시뮬레이션 결과와 Wieser[7] 등의 실험 데이터를 비교하였다.
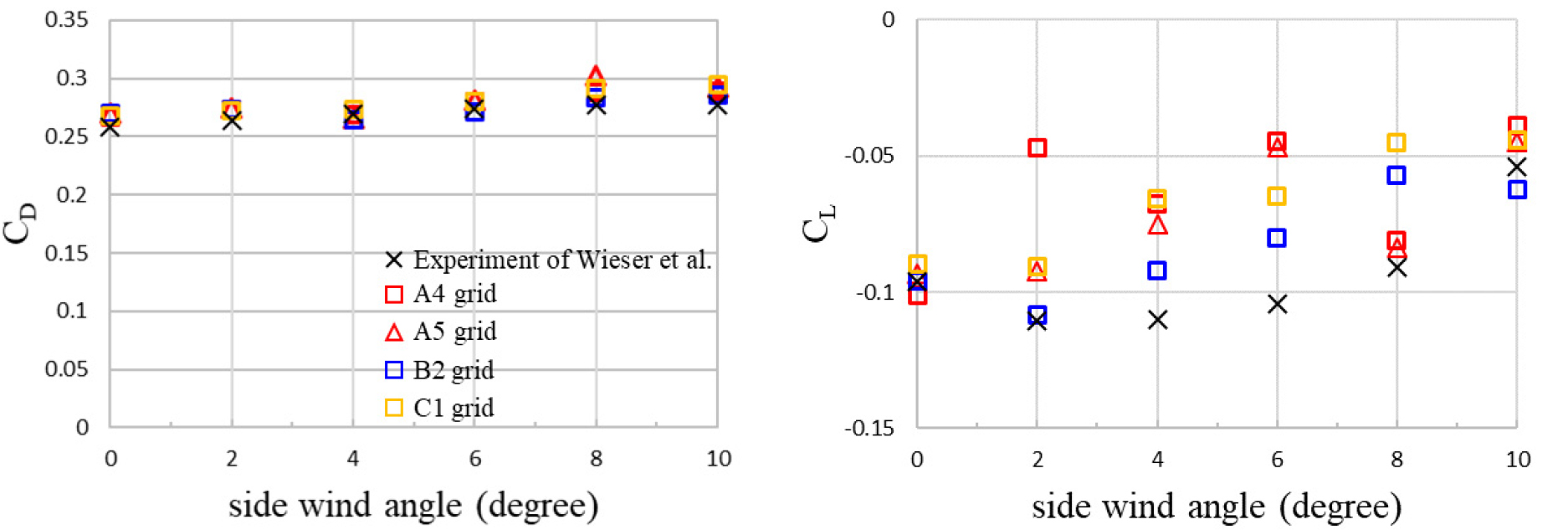
정량적 분석을 위해 항력계수와 양력계수 실험값과의 오차를 Table 3에 비교하였다. 항력계수의 경우, 모든 케이스에서 실험값과의 오차가 5% 이내로 나타났으며, 양력계수는 15%에서 30% 정도로 항력계수에 비해 상대적으로 큰 오차가 발생한 것으로 확인되었다. 이러한 오차의 차이는 양력계수가 항력계수보다 상대적으로 작은 값을 가지는 특성에서 비롯된 것으로 판단되며, 또한 양력계수에서 발생하는 비정상 유동에 의한 수치적 불안정성이 주요 원인으로 작용한 것으로 보인다. Fig. 6(a)에서 상단 표면의 압력계수는 실험 데이터와 일치하는 것을 알 수 있지만 Fig. 6(b)의 하단 표면의 압력계수의 경우 진동하는 결과를 보이는 것을 알 수 있다. 항력계수를 계산할 때는 차량의 전면 면적을 이용하여 계산하기 때문에 차량 전면 부분의 압력계수 정확도가 그대로 반영되어 정확한 결과를 얻을 수 있다. 반면, 양력 계수는 차량 상부와 하부에 걸친 압력 차이를 기반으로 계산되는데, 하부에서 발생하는 비정상 유동에 의해 압력계수 진동이 유발되며, 이에 따라 양력계수의 수치적 불안정성이 나타난 것으로 판단된다.
Table 3.
List of relative errors of the drag coefficient and the lift coefficient by the grid type
모든 격자 케이스를 비교한 결과, B2 케이스는 평균 항력계수 오차가 2.6%, 평균 양력계수 오차가 15.8%로 다른 격자들에 비해 매우 정확한 결과를 제공하였다. 비교적 적은 격자 개수로 정확한 결과를 제공한 것은 A5 케이스로, 가장 정확한 결과를 제공한 B2 케이스 다음으로 정확한 결과를 제공하였다. 이때의 항력계수 오차는 2.8%, 양력계수의 오차는 21.9%인 결과를 제공하였다. 하지만 A5의 격자 개수는 B2 격자 개수의 1/3 수준 정도이므로, 격자 대비 매우 정확한 결과를 제공한 것을 알 수 있다. 격자 개수는 비용과 연관이 되는 매우 중요한 파라미터로, 효율적인 CFD 시뮬레이션을 위해서는 최적의 격자 크기와 구성을 선택하는 것이 중요하다. 과도한 격자 개수는 계산 비용을 증가시키지만, 적절히 최적화된 격자 설정은 비용 대비 높은 정확도를 제공할 수 있다.
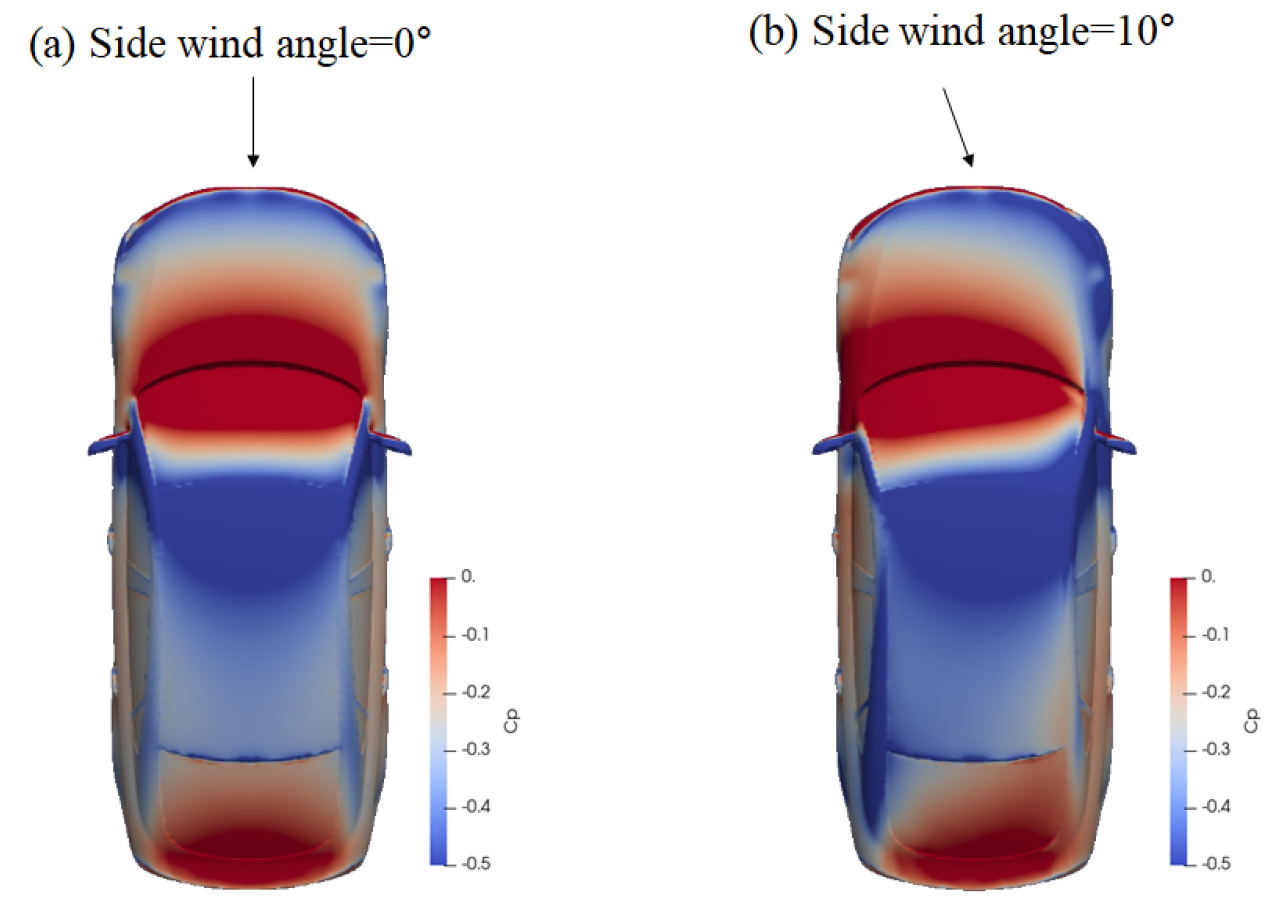
가장 정확한 결과를 제공한 B2 격자를 이용하여, 풍향 각도가 0도와 10도인 경우에 대해 위에서 바라본 차량 표면의 압력계수 분포를 Fig. 8에서 비교하였다. 풍향 각도가 증가함에 따라, 저압 영역이 차량 전면에서는 우측으로, 차량 후면에서는 좌측으로 이동한 것을 알 수 있다. 항력은 횡풍 각도가 10°까지 증가할 때 실험의 경우 약 7% 증가하였으며, 시뮬레이션의 경우 평균적으로 7.6% 증가하였다. 이는 차량 후면에서 발생하는 유동 박리와 밀접한 관련이 있으며, 차량의 항력은 비대칭 유동과 더 큰 저압 영역으로 인해 증가하게 된다.
4. 결 론
본 연구에서는 전산유체역학(CFD) 기법을 활용하여 횡풍 조건에서의 자동차 공기역학적 특성을 분석하고, 실험 결과와의 비교를 통해 CFD 기법의 유효성을 검증하였다. 특히, DrivAer fastback 모델을 사용하여 정확한 공기역학적 예측을 도출하였으며, 격자 재분할 기법을 통해 효율적인 계산과 정확도를 최적화할 수 있었다. 연구 결과, 차량 주변 영역의 격자 세분화가 항력계수와 양력계수 예측에 중요한 영향을 미친다는 사실을 확인하였다. 특히, 자동차 주변 영역의 격자 크기를 차량 길이의 0.6%보다 작은 크기의 격자를 사용하는 경우, 정확한 항력계수와 양력계수를 예측할 수 있는 것을 확인하였다. 이는 차량 주변 영역에 대해 충분히 세밀한 격자를 사용하는 것이 중요함을 의미한다.
차량 상단 표면의 압력 분포 정확도가 항력계수 예측에 있어 중요한 영향을 미친다는 사실을 확인하였으며, 하단 표면의 압력계수 비교에서 비정상 유동으로 인한 압력계수 진동이 양력계수의 수치적 불안정성을 유발하는 것으로 분석되었다. 또한, 횡풍 각도가 증가함에 따라 차량 전면과 후면의 압력 분포가 변하게 되며, 이에 따른 항력계수의 증가가 실험값과 잘 일치하는 것을 확인하였다. 이는 격자 재분할 기법을 활용한 CFD 방법론이 횡풍 조건에서도 충분히 높은 정확도를 제공할 수 있음을 시사한다.
또한, 횡풍 조건에서 가장 정확한 격자에 비해 1/3 수준의 격자 개수로도 비교적 높은 정확도의 결과를 제공할 수 있음을 확인할 수 있었다. 해당 격자는 배경 격자가 아닌, 차량 주변 영역의 격자 세분화만을 최적화하여 계산 효율성을 높이면서도 유사한 정확도의 결과를 얻을 수 있음을 의미한다. 이는 적절한 격자 설정을 통해 계산 시간을 단축시키는 동시에 실험 결과와의 일치를 유지할 수 있음을 시사한다.
