

1. 서 론
2. 수치기법 및 전산해석 모델 정보
2.1 수치기법
2.2 익형 전산해석 모델 정보
3. 익형 설계 기법
3.1 실험계획법
3.2 형상 변형 함수
3.3 메타모델 생성 기법
3.4 최적설계
4. 전산 해석 및 최적화 결과
4.1 최적화 익형 형상 정보
4.2 최적화 결과
5. 결 론
1. 서 론
회전익기(Rotary Wing Aircraft, Helicopter)는 기체의 상단에 위치한 메인 로터 블레이드를 회전시킴으로써 추력과 양력을 얻는 형태의 항공기를 의미한다. 회전익기는 활주로가 없는 곳에서 수직 이착륙이 가능하며 제자리비행을 할 수 있다는 특성상 전 세계에서 민간용과 군사적 목적을 가리지 않고 활발히 이용되고 있다. 그러나 일반적인 형태의 회전익기(Conventional Helicopter)는 기체의 진행 방향과 메인로터의 회전면(Disc Plane)이 평행하다는 특성으로 인해, 전진 비행 시 메인로터의 회전 방위각(Azimuth Angle)에 따라 전진면 영역(Advancing Side)과 후진면 영역(Retreating Side)으로 나누어지기 때문에 고속 비행에 제약이 있으며 , 일반적인 고정익기(Fixed Wing Aircraft)에 비해 양항비(Lift-Drag Ratio)가 낮고 항속거리가 짧다는 단점이 있다[1]. 이러한 일반적인 형태의 회전익기의 단점을 극복하고 250노트 내외의 고속비행을 달성하기 위해 다양한 시도가 있어 왔으며 대표적인 시도로는 복합형 회전익기(Compound Helicopter)와 틸트로터형 항공기(Tiltrotor Aircraft)의 개발이 있다[2].
복합형 회전익기의 경우 일반적인 형태의 회전익기에 보조 추력장치(Auxiliary Propulsor)를 추가로 장착하고, 고속 비행 시 메인 로터 블레이드의 회전수를 줄임으로써 메인 로터 블레이드의 전진면 유동 속도가 천음속에 도달하는 것을 지연시켜 항력 발산을 늦추는 방식으로 고속 비행을 가능하게 한다. 복합형 회전익기는 보조 추력장치의 유형에 따라 나눌 수 있으며 푸셔 프롭형(Sikorsky X2TD, S-97, SB>1 Defiant), 트랙터 프롭형(Eurocopter , Airbus RACER), 제트엔진형(Sikorsky XH-59), 덕트형(Piasecki X-49) 등이 있다[2].틸트로터형 항공기는 프롭로터(Proprotor)라는 추진계통을 통해 추력을 얻는다. 이 프롭로터라는 단어는 고정익기의 프로펠러(Propeller)와 회전익기의 로터(Rotor)의 합성어로, 비행 상황에 따라 회전면의 각도를 조절할 수 있다. 이를 통해 틸트로터형 항공기는 이착륙 시에는 회전익 모드로 비행하고, 이외의 비행 구간에서는 천이 과정을 통해 고정익 모드로 비행함으로써 수직 이착륙과 제자리비행이 가능한 회전익기의 장점와 고속/고효율 비행이 가능한 고정익기의 장점을 모두 취할 수 있다. 틸트로터형 항공기의 개발은 Bell Helicopter 사가 선도하고 있으며 Bell Helicopter 사는 1955년 XV-3의 시험비행에 성공하여 최고속도 155노트를 달성하였으며, 1977년에는 기술실증기인 XV-15의 시험비행에 성공하여 332노트의 최고속도를 달성하였다[3]. 또한 Bell Helicopter 사는 XV-15의 개발 경험을 바탕으로 V-22 Osprey를 개발하여 양산에 성공하였으며, 민수용 시장을 개척할 목적으로는 BA609(AW609)를, 미 육군의 UH-60 회전익기를 대체할 차세대 항공기인 V-280 Valor를 개발하였으며 각각 2003년과 2017년에 최초비행을 성공하였다.
틸트로터의 프롭로터에 사용되는 익형(Airfoil)은 회전익기의 메인 로터 블레이드에 사용되는 익형과 고정익기의 프로펠러에 사용되는 익형의 특성을 동시에 고려하여 설계할 필요성이 있다. 메인 로터 블레이드에 사용되는 익형은 최대양력계수(, Max Lift Coefficient)는 비교적 낮되 매우 작은 피칭모멘트 계수(Pitching Moment Coefficient, )와 높은 항력 발산 마하수(Mach Drag Divergence, MDD)를 가지며 이는 고속 유동이 존재하는 전진면 상에서 플래핑(Flapping) 운동 등에 의한 블레이드 변형과 충격파(Shock Wave)에 의한 급격한 항력 증가를 막기 위함이다[4]. 반대로 프로펠러에 사용되는 익형은 큰 피칭모멘트 계수와 함께 매우 높은 최대양력계수를 가진다[5]. 이는 프로펠러가 탄성이 존재하는 로터 블레이드와 달리 강체에 가깝기 때문에 피칭모멘트에 의한 변형이 비교적 적으며, 회전면이 동체에 수직한 프로펠러의 특성상 지상 충돌을 막기 위해 프로펠러 반지름의 크기가 제한되어 큰 디스크 로딩(Disc Loading)을 가져 좁은 면적에서 큰 추력을 내야 하기 때문이다.
기술실증기인 XV-15의 프롭로터에는 당시 일반 회전익기에 사용되는 층류 익형인 NACA 64 계열 익형을 사용하였으며, 기존 XV-15의 개량형인 XV-15 ATB(Advanced Technology Blade)의 프롭로터에는 고양력 성능을 가져 CH-47 Chinook 등의 고중량, 고기동 회전익기에 사용되는 VR-7 및 VR-8 익형을 사용하였다[6]. 이후 Bell Helicopter 사는 틸트로터 항공기의 프롭로터를 위한 별도의 익형 개발의 필요성이 있다고 판단하여 NACA 64 계열 익형을 기저익형으로 하여 최적화를 진행한 XN 계열 익형을 개발하여 V-22 Osprey의 프롭로터에 적용하였다[7]. XN 계열 익형은 기저익형인 NACA 64 계열 익형보다 매우 높은 양력성능을 가지며 이와 동시에 항력계수와 항력 발산 마하수는 거의 유지하는 것을 목표로 설계했다는 특징을 가지고 있다. 한편 Johnson 등은 XN 익형의 설계 경험을 바탕으로, V-22의 순항속도인 280노트보다도 더 빠른 순항속도를 가지는 프롭로터를 설계하기 위해서는 V-22에 사용된 XN- 익형보다 는 낮되 항력 발산 마하수가 높은 익형을 사용하는 방안을 제안하였다[8].
본 연구에서는 기존의 XV-15 프롭로터에 사용된 NACA 64 계열 익형을 기저익형으로 하여 제자리비행, 300노트 순항 조건, 천이비행 및 350노트 최대속도 조건에서 각각의 운용 조건에 알맞은 공력계수를 갖도록 직접설계 기법을 통해 익형 최적화를 진행하였다. 직접설계 기법에서 기저익형의 형상을 변형시킬 때 사용하는 대표적인 형상 변형 함수로는 Raymond 등이 제안한 Hicks-Henne 함수[9]가 있으며, 이는 기저익형의 윗면과 아랫면 상의 특정 지점에 Bump를 부가함으로써 비교적 단순하게 구현할 수 있다는 장점이 있다. 한편 Lee 등은 익형의 윗면과 아랫면에 각각 5개의 설계점을 배치한 기본 Hicks-Henne 함수에서 캠버면에 4개의 설계점을 추가로 배치한 수정된 Hicks-Henne 함수를 제안하였다[10]. 틸트로터의 추진계통인 프롭로터의 익형은 높은 양력 성능을 요구하는데 양력성능은 통상 캠버의 크기에 비례한다고 알려져 있다[11]. 따라서 본 논문에서는 이러한 고양력 성능을 달성하기 위해서 익형 캠버의 직접적인 조작이 필요하다는 사실에 착안하여 Lee 등이 제안한 캠버의 조절이 가능한 수정된 Hicks-Henne 함수를 사용하였다.
형상 변형 함수와 공력계수 결과값의 관계를 나타내는 메타모델의 구성에 사용되는 대표적인 기법은 크리깅(Krigging) 기법, 인공신경망 기법, 반응표면(Response Surface) 기법 등이 있다. Jang 등은 익형 최적 설계 시 크리깅 기법을 사용해 메타모델을 구성하였다[12]. 크리깅 기법은 비선형 문제에 대해 높은 신뢰도를 가진다는 장점이 있으나 신뢰도가 높은 모델을 생성하기 위해서는 타 메타모델보다 모델 형성에 많은 시간이 소요된다는 단점이 있다. 인공신경망 기법 또한 비선형 문제에 대해 신뢰도가 높다는 장점이 있으나, 모델 생성을 위한 학습에 시간이 소요되고 블랙박스 구조이기 때문에 도식화가 매우 어렵다[13]. Lee[10], Sun[14] 등은 익형 최적 설계 시 반응표면을 이용하여 메타모델을 구성하였다. 반응표면기법은 설계점에 기반한 입력변수와 응답변수 사이의 관계를 결정하는 모델을 생성하는 기법으로 통상 2차다항식이 선호된다. 반응표면기법은 데이터를 다항식으로 모델링하는 특성상 근사오차가 발생하나 모델 생성에 매우 짧은 시간이 소요되며 단순한 다항식으로 구성된다는 특성상 전역탐색에 매우 유리하기에 본 논문에서는 메타모델 구성 시 반응표면기법을 사용하였다. 이후 구성된 메타모델에서 각각의 공력계수에 대한 목표 구속조건을 모두 만족하는 전역 최적치(Global Optimum Value)를 탐색하여 후보군을 도출하고, 각각의 공력계수들에 대한 가중치를 부가하여 최종적으로 최적화 익형을 도출하였다.
2. 수치기법 및 전산해석 모델 정보
2.1 수치기법
2.1.1 지배 방정식 및 경계 조건
본 연구에서는 전산해석 시 건국대학교의 In-house Navier-Stokes 해석자인 KFLOW를 사용했으며, 지배 방정식은 3차원 압축성, 점성 RANS(Reynolds Averaged Navier-Stokes) 방정식이다.
공간 이산화에는 격자 중심(Cell-centered scheme) 유한체적법(Finite Volume Method, FVM)을 사용했으며, 점성 유속은 중앙차분법으로, 비점성 유속은 Roe FDS(Flux Difference Splitting) 기법으로 구하였다[15]. 비점성 유속을 구할 때는 2차 공간정확도의 확보를 위해 MUSCL(Monotone Upstream Scheme for Conservation Law) 기법을 사용하였으며 Minmod 제한자를 사용했다[16]. 시간 이산화에는 2차원 익형에 대한 정상 상태 해석 시 대각화 ADI(Digonalized ADI, DADI) 기법을 사용했다[17]. 난류 모델은 SST 모델을 사용했다[18].
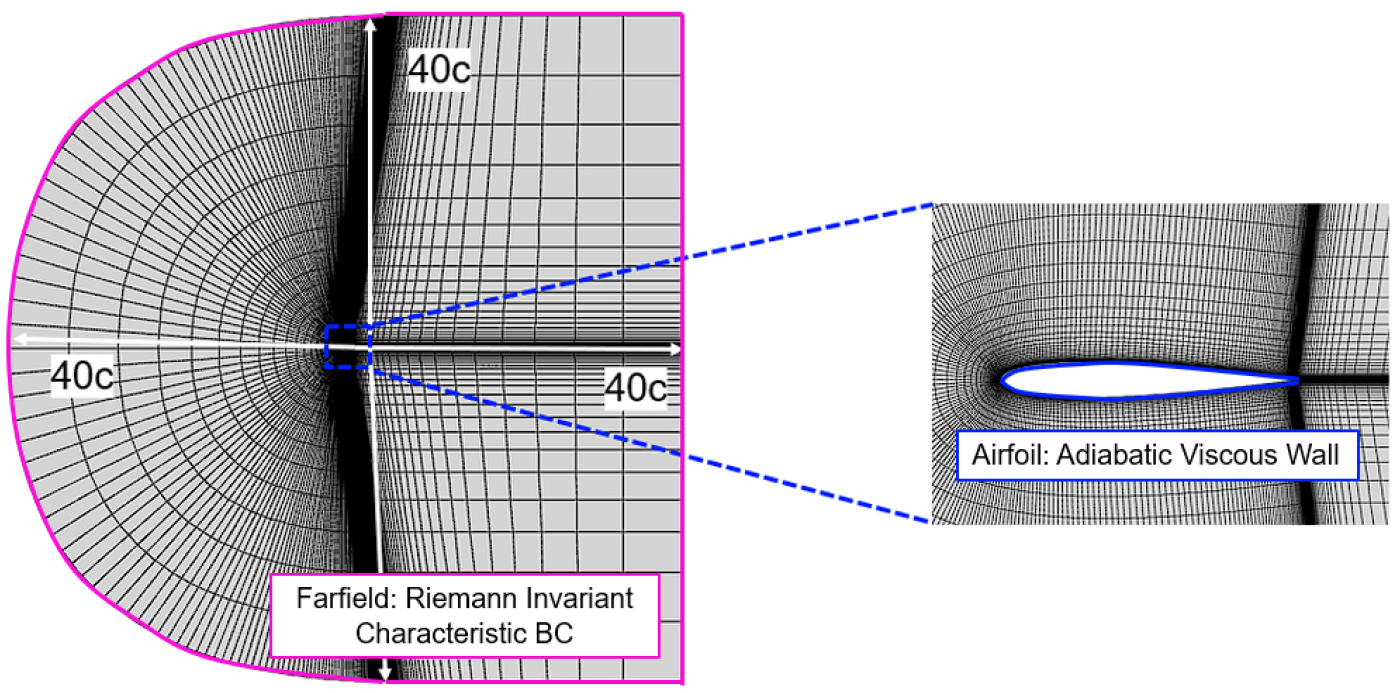
지배 방정식인 압축성, 점성 RANS 방정식은 미분 방정식이기 때문에 해를 도출하기 위해서는 경계조건(Boundary Condition)과 초기조건(Initial Condition)이 지정될 필요가 있다. 경계조건의 경우 익형 표면에는 단열 점성 벽면 경계조건(Adiabatic Viscous Wall Boundary Condition)을 사용했다. 원방 경계에서는 Riemann 불변치 에 기반한 특성 경계 조건인 Riemann 불변 조건(Riemann Invariant Condition)을 사용했다[19].
2.1.2 격자 변형 기법
기저익형의 형상을 변형할 경우, 기저익형 주위에 위치한 배경격자의 형상 또한 변형된 익형 형상에 따라 알맞게 변형되어야 한다. 본 연구에서는 거리에 따라 값이 결정되는 RBF(Radial Basis Function)를 사용하여, 기저익형 변형량이 주어지면 익형과 가까운 거리에 위치한 격자는 변형량이 크고 익형과 먼 곳에 위치한 격자는 변형량이 작도록 하였다[20]. Radial Basis Function은 일정 반경 바깥의 영역을 제외하는 것이 가능하여 격자변형에 적합한 Wendland’s C2 함수를 선택하였다[21].
2.2 익형 전산해석 모델 정보
2.2.1 모델 및 격자 정보
2차원 익형 해석을 위한 정렬 격자를 구성 시 시위길이 가 1이 되도록 하여 무차원화된 격자를 생성하였다. 원방 길이는 40로 설정하였고, 점성 저층을 적절히 모사하기 위해 벽면 근처의 격자 간격 이 되도록 격자를 생성하였다. 시위길이(Chordwise, ) 방향과 수직(Normal, ) 방향에 대해 각각 381개와 81개의 격자점을 배치하였으며 총 격자 수는 30,400개이다. 2차원 익형 격자의 그림은 Fig. 1과 같다.
2.2.2 전산해석 모델의 검증
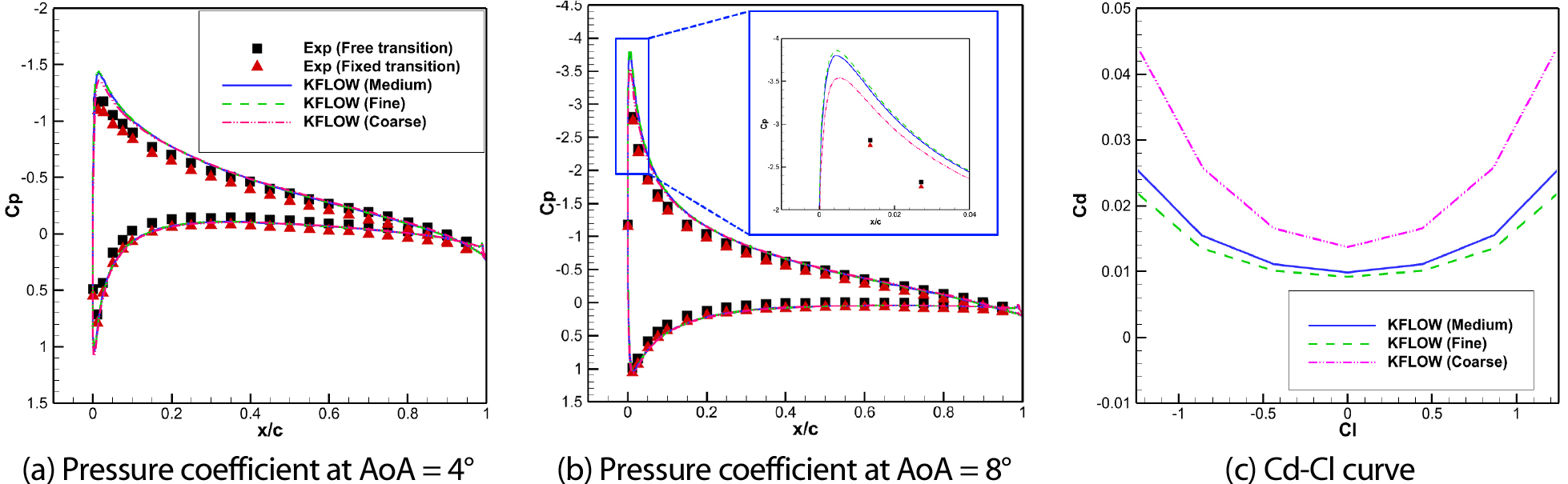
2차원 익형 모델에 대해 전산해석을 실시하기에 앞서 풍동 실험 데이터를 이용해 KFLOW 해석자의 검증과 격자 의존성 테스트를 실시하였다. NASA의 NACA 0012 익형 풍동 실험 자료를 이용하여 Mach 0.3, 레이놀즈수 3×106 조건의 유동장 조건에서 받음각 4도와 8도에서의 압력계수에 대한 검증을 실시하였다[22].
격자 수렴성을 확인하기 위해 익형 배경격자에 대해 Coarse, Medium, Fine 격자를 정의하여 위 조건에 대한 격자 수렴성 테스트를 진행하였다. 블레이드 배경격자의 Normal 및 Spanwise 방향의 격자수를 Medium 격자에 비해 40%씩 차이를 주었으며 격자 정보는 Table 1과 같다. 전산해석은 정상상태 조건으로 진행했으며 Iteration 횟수는 20,000회, 수렴조건은 RMS≈10-6, CFL Number는 2.0이다. 검증 결과는 Fig. 2와 같다.
해석 결과 전산해석 결과가 풍동 실험값과 일치함을 확인하였다. 격자 수렴성 테스트 결과 Coarse 격자는 Fig. 2 (a), (b)와 같이 받음각이 증가할수록 앞전에서의 압력계수 Peak가 Medium 및 Fine 격자의 경향을 벗어나는 것이 식별되었으며, Fig. 2(c)와 같이 항력계수에 대해서도 Medium 및 Fine 격자에 비해 큰 차이를 보였다. 따라서 계산자원 및 계산 소요시간을 고려하여 Medium 격자를 이용해 전산해석을 진행하였다.
Table 1.
Description of grid convergence test
| Grid | Index points Normal() × Spanwise() | Number of cells | Computation time, averaged(s) |
| Fine | 531 × 113 | 59,360 | 46.9(223%) |
| Medium | 381 × 81 | 30,400 | 21.0(100%) |
| Coarse | 251 × 49 | 12,000 | 9.5(45%) |
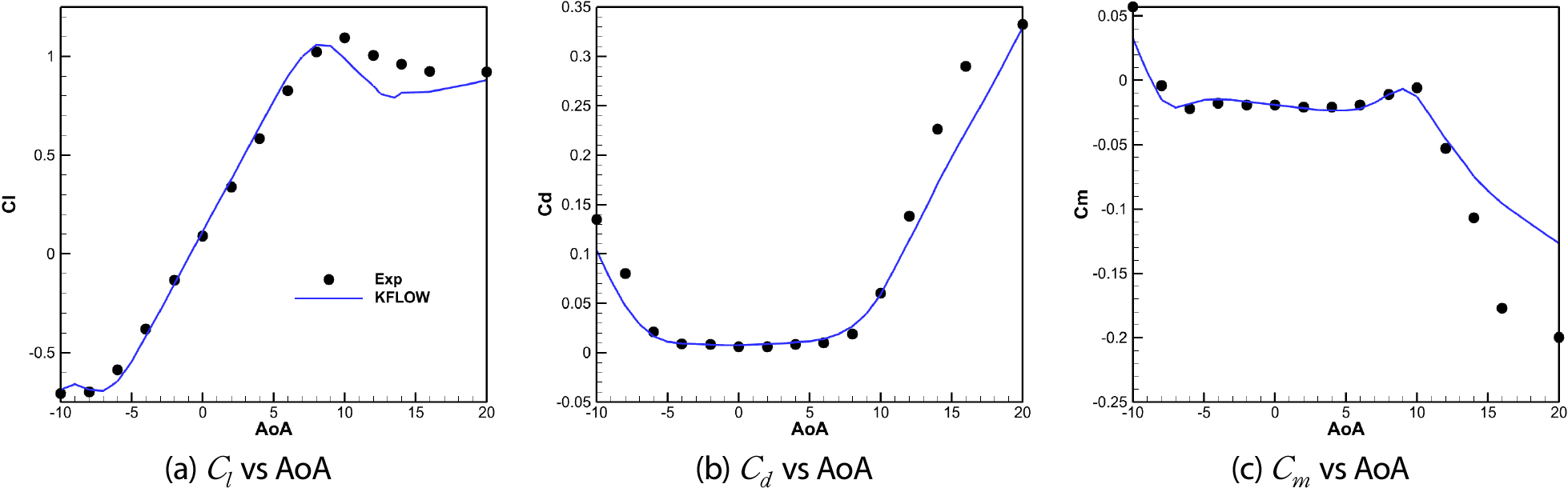
공력계수 검증을 위해 XV-15에 사용된 익형인 NACA 64-(1.5)12 익형의 C81 Table 자료 중 M=0.5에서의 공력계수인 , 을 KFLOW 해석 결과와 비교하였고 Fig. 3과 같이 KFLOW 해석 결과와 C81 Table 값이 일치함을 확인하였다[23].
3. 익형 설계 기법
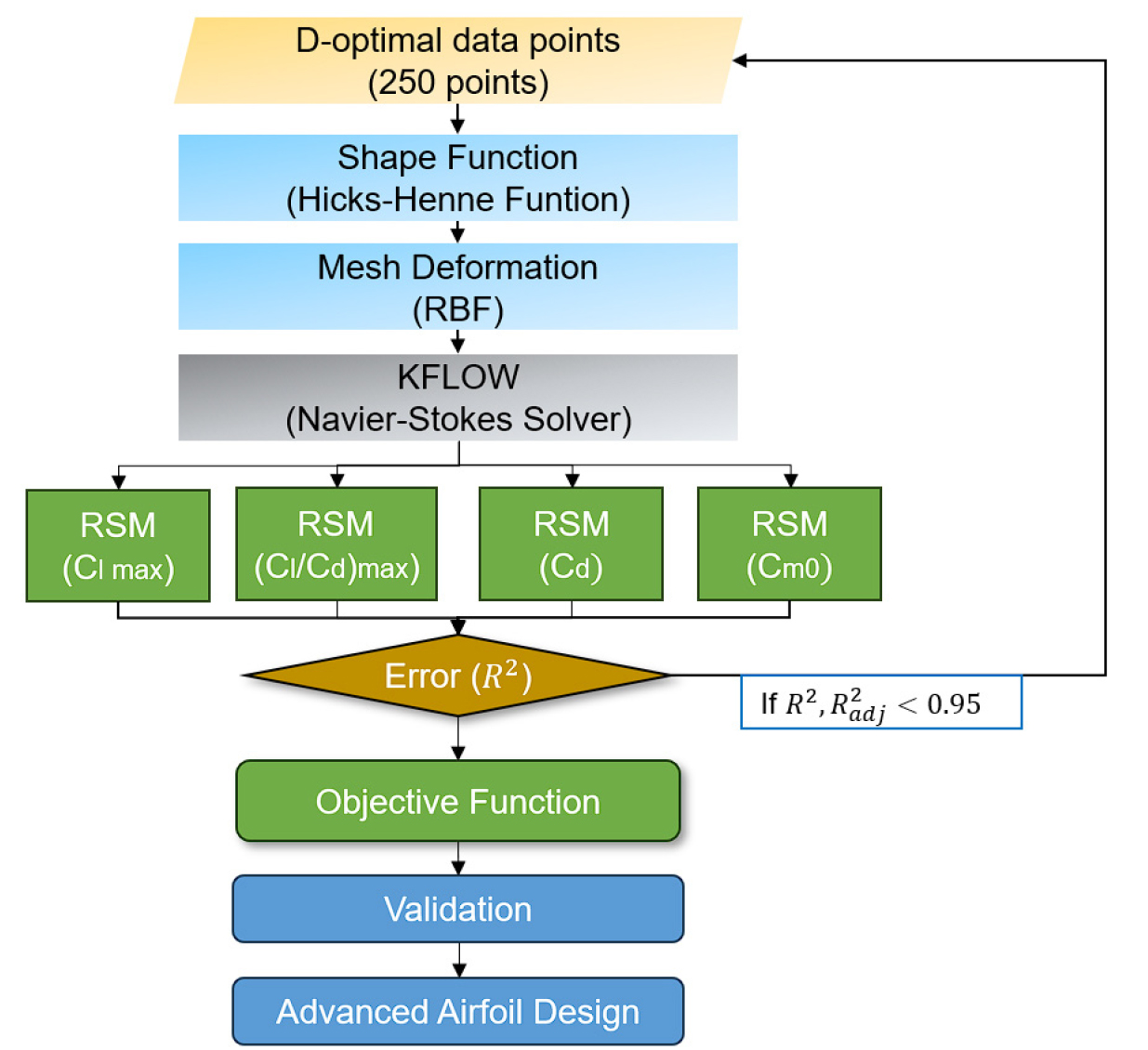
익형 설계 절차는 실험계획법을 통한 설계점 추출, 형상변형 함수 적용을 통한 익형 형상 및 격자 변형, 유동장 해석, 메타모델 생성 및 결정계수 검증, 목적함수 적용, 검증 및 최종 익형 선정 순이다. Fig. 4에 Flow Chart를 나타내었다.
3.1 실험계획법
본 연구에서는 14차원 설계점에 대해 형상함수를 적용하여 익형 형상 변형과 격자 변형을 진행한 후, 유동장 해석 결과에 따라 14차원의 설계점과 공력계수에 대한 메타모델을 구성한다. 메타모델 구성에 사용한 2차 반응면 기법을 차원의 설계변수에 대해 구현하기 위해 필요한 실험설계점의 개수는 개이므로 14차원 설계변수에 대해 2차 반응면 메타모델을 구성하기 위해서는 최소 120개의 설계점이 필요하다. 본 연구에서는 최소 설계점의 약 2배인 250개의 설계점을 설정하였고, 실험설계점의 추출의 경우 오픈소스 통계 프로그램인 R[24]에서 제공하는 3-level(-1, 0, 1) D-optimal 기법(Fedorov Algorithm)을 사용하였다[25]. 3-level D-optimal(Fedorov Algorithm) 기법은 실험계획법의 일종으로, 14개의 변수에 대한 실험 구간을 3수준으로 분할했을 때 주어지는 314개의 설계점 중 적절한 250개의 설계점을 추출하는 알고리즘이다.
3.2 형상 변형 함수
본 연구에서는 Lee 등이 제안한 수정된 Hicks-Henne 함수[10]를 형상 변형 함수로 이용하였다. Hicks-Henne 함수의 원형 함수는 기저익형의 윗면과 아랫면 각각 5개의 지점에서 가중치 값에 따라 bump 를 부가하여 형상을 변형하며[9], 식 (1)과 같다.
여기서 는 bump의 진폭을 결정하는 가중치이며 는 bump의 위치와 너비를 결정하는 함수이다. 은 익형의 앞전 반지름에 적용되는 함수로 식 (2)와 같다. ~는 익형의 면에 적용되는 함수로 식 (3)와 같다.
면에 적용되는 함수인 식 (3)에서 는 bump의 peak 위치를 결정하는 변수로 0~1 사이의 값을 가진다. 본 연구에서는 20%c부터 80%c까지 20%c의 등간격을 가지도록 설정하였다. 는 bump의 너비를 결정하는 변수로 클수록 너비가 넓어지고 작을수록 너비가 좁아진다. 대표적인 선행 연구자들이 결정한 값은 Table 2와 같으며, 대부분의 연구에서 3을 가지기에 본 연구에서도 3을 채택하였다.
Table 2.
values selected by previous studies
| Value | Hicks & Henne, 1979[9] | H.M. Lee et al, 1999[26] | Y.M. Park et al, 2004[27] | S.M. Lee et al, 2010[10] |
| 3 | 3, 1(T.E. only) | 3 | 3 |
Fig. 5(a)에 함수의 형상을, Fig. 5(b)에 기저익형에 Hicks-Henne 함수를 적용하여 변형된 후 익형의 형상을 나타내었다.
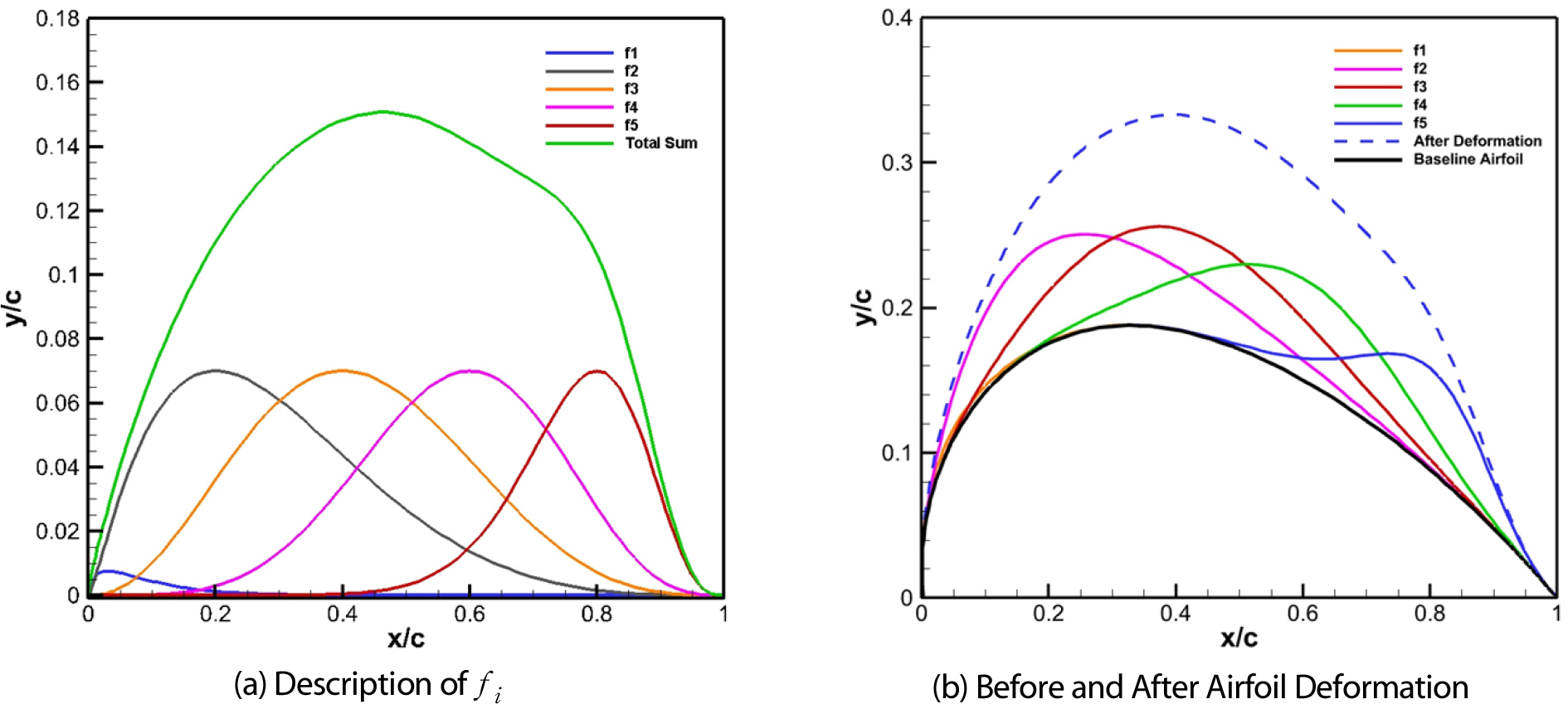
앞서 언급했듯이 익형의 양력성능은 통상 캠버의 크기에 비례한다는 사실이 알려져 있으므로, 본 연구에 사용한 수정된 Hicks-Henne 함수는 익형의 평균 캠버선에 추가로 Hicks-Henne 함수를 적용하였다[21]. 평균 캠버선에 적용된 Hicks- Henne 함수는 식 (4) ~ (5)와 같다.
여기서 는 캠버에 대한 가중치를 의미한다.
3.3 메타모델 생성 기법
본 연구에는 반응표면[28]을 이용하여 메타모델을 구성하였다. 익형 최적화의 경우 통상 형상함수 변수에 대한 공력계수()로 반응면을 구성할 시 =0.9 이상의 높은 신뢰도를 보이는 것으로 알려져 있으므로 모델링 기법 특성으로 인해 발생하는 근사오차의 영향은 적을 것이라고 판단하였다[14]. 또한 다수의 구속조건과 공력계수 설계조건이 존재하는 본 연구 특성상 모델 생성에 매우 짧은 시간이 걸리는 장점이 있는 반응표면기법을 사용하였다.
본 연구에서 사용한 반응표면기법은 최소자승법을 기반으로 생성된 2차 다항식 회귀모델이며 식 (6)과 같다.
반응면 기법은 데이터를 다항식으로 근사하는 특성상 오차가 존재한다. 반응면의 정확도를 나타내는 대표적인 지표로는 결정계수(, Coefficient Determination)와 수정된 결정계수(, Adjusted Coefficient Determination)가 있다. 이 계수들은 0과 1 사이의 값을 가지며 1에 가까울수록 반응면 모델이 주어진 데이터를 잘 근사한다는 것을 의미한다. 결정계수 은 설계 변수의 차원이 증가할 경우 함께 증가하는 경향이 있어 이를 보정해 주는 수정된 결정계수인 를 함께 확인하여 반응면의 신뢰성을 검토할 필요가 있기에 반응면 신뢰성 평가에서 와 를 함께 평가하였다.
3.4 최적설계
3.4.1 XN 익형 설계 사례
Bell Helicopter 사가 XN 익형 설계 과정[7]에서 최우선으로 최적화를 목표한 공력계수는 최대양력계수()로, 최적화 대상 유동 속도는 회전익 모드에서 40노트의 속도로 전진 비행 시 후퇴면에서의 값이다. 이는 회전익 또는 천이 모드에서 전진 비행 시 전진면과 후퇴면의 추력 차이를 완화하여 기체의 기동성을 향상시킬 목적으로 설정되었다. 2순위로 최적화를 목표한 공력계수는 항력계수()로 최적화 대상 유동 속도는 고정익 모드에서 순항속도 300노트로 순항 비행 시의 값이다. 고정익 모드로 순항 시의 유동 속도와 양력계수()에서의 항력계수()를 낮춤으로써 프로펠러 효율(𝜂)을 향상시킬 목적으로 설정되었다.
3순위로 최적화를 목표한 공력계수는 항력발산 마하수(Mach Drag Divergence, MDD)로, 최적화 대상 유동 속도는 고정익 모드에서 최대속도인 350노트로 순항 비행 시의 값이다. 순항속도보다 더욱 빠른 속도로 비행 시 항력의 급격한 증가를 막기 위한 목적으로 설정되었으며 정의는 식 (7)과 같다.
4순위로 최적화를 목표한 공력계수는 최대양항비()로, 최적화 대상 유동 속도는 회전익 모드에서 제자리비행(Hovering) 시의 값이다. 제자리비행 시 소모되는 동력을 줄여 FM을 향상시키기 위한 목적으로 설정되었다.
영양력 피칭모멘트계수()는 블레이드의 과도한 변형을 막기 위해 구속조건으로 설정되었고, 두께비는 구조 및 진동특성을 고려한 값을 구속조건으로 설정하였다.
Bell Helicopter 사는 프롭로터의 순항 운용 양력계수 을 Tip 및 Outboard 영역은 각각 0.3과 0.2, 나머지 영역은 0으로 판단하여 최적화를 진행하였다. Bell Helicopter 사가 제시한 프롭로터용 XN 익형의 설계구속조건의 요건에 따라 KFLOW의 SST 완전 난류 모델로 해석한 NACA 64 익형의 성능은 Table 3과 같다.
Table 3.
Performance of NACA64 airfoil with XN design contraints
XN 익형은 XV-15에 사용된 NACA 64 계열 익형과, 고중량 회전익기용 익형이자 XV-15 ATB에 사용된 VR 계열 익형보다 훨씬 높은 양력계수를 가지고 있다. 또한 XN 익형의 최적화 대상 유동속도를 역산하여 도출한 최적화 대상 위치는 실제 배치 위치보다 0.05R~0.10R 가량 안쪽에 위치해 있기에 최적화 목표 위치는 V-22와 유사한 0.90R, 0.70R, 0.50R및 0.20R으로 지정했다.
3.4.2 최적설계 문제의 정의
익형 최적설계를 진행하기에 앞서 최적화 대상 유동 마하수, 목표 공력계수와 구속조건 등을 설정할 필요가 있다. 본 연구에서 XV-15의 NACA 64 익형의 최적화 목적 위치는 V-22의 사례를 참고하여 Tip 및 Outboard 영역 익형은 실제 위치보다 소폭 안쪽 지점인 0.90R, 0.70R으로 설정하였고 Midsection 및 Inboard 영역 익형은 기존 위치와 가까운 0.50R과 0.20R에 배치하였다. 각각의 조건에서의 공기밀도와 점성계수는 이상 기체 방정식과 Sutherland 법칙을 사용하여 도출하였고 시위길이를 통해 레이놀즈수를 계산하였다.
목표 공력계수는 V-22의 XN 익형과 NASA의 LRA 익형의 설계목적 및 구속조건을 참고하였다[7,29]. 본 연구에서 최적화할 Tip Section에서의 익형인 NACA 64-208은 XN09 익형보다 1%p 얇은 8%c 익형이기 때문에 XN 익형의 구속조건을 따르기가 어렵다고 판단하여 LRA 익형의 설계조건인 1.15로 설정하였다. 나머지 영역 익형의 와 는 XN익형과 유사한 값으로 설정하였다. 와 의 경우, 본 연구에서는 난류 모델을 사용하여 유동장 해석을 진행하기 때문에 층류와 난류가 혼재된 풍동 실험으로 도출된 XN익형의 구속조건을 그대로 참고하는 것은 곤란하다. XN 익형은 NACA 64의 최저항력을 기준으로 설계되었기에, NACA 64 익형의 최저항력과 양항비를 설계조건으로 설정하였다. MDD는 목표 순항비행 속도보다 50노트 빠른 350노트에서의 비행 조건에서의 마하수보다 더욱 높은 값을 가지도록 구속조건을 설정하였다. 다만 Tip 영역 기저익형인 NACA 64-208 익형의 MDD는 0.754로 350노트에서의 마하수인 0.80을 이미 초과하기에 목표치를 0.75로 설정하여 기저익형의 MDD를 유지하고자 하였다. 최종적으로 설정된 구속조건은 Table 4와 같다.
Table 4.
Design constraints and objective
3.4.3 목적 함수
마지막으로 최적화 과정에서 사용할 목적 함수를 정의하였다. 목적 함수인 을 최대화하고 를 최소화하면서 구속조건을 만족하는 14개의 형상 설계점 를 찾는 것이 목표이며 다음과 같이 정의하였다.
Find:
To Maximize:
To Minimize:
(Tip Section)
(Outboard Section)
(Midsection• Inboard Section)
Constraints:
, Max Camber ≤ 4%c
Max t/c • Max Camber location ≤ 50%c
양력계수의 최댓값만 높고 그 외의 받음각에서는 급격히 저하되는 익형이 선정되는 것을 방지하기 위해 ±2°에서의 양력계수를 추가로 가중치로 설정한 변수를 도입했다[30]. 합리적인 익형의 형상을 위해 두께비 변화는 ±0.3%c, 캠버의 크기는 4%c로 제한하였고 최대두께비 및 최대캠버 위치는 50%c로 제한하는 구속조건을 제시하였다. 최적화 기법의 경우 전역 탐색 기법으로 탐색한 후보군에 대해 가중치를 부가하였다. MDD의 경우 다수의 유동속도에서의 계산이 필요하기에 우선 MDD를 제외한 4개의 공력계수(, , , )에 대해 구성한 반응면을 바탕으로, 14개의 설계변수를 각각 6개의 구간으로 나누어 총 614개의 조합에서 전역 탐색을 수행하여 4개의 구속조건을 만족하는 100개의 후보군을 1차적으로 도출하였다. 1차적으로 도출한 100개의 후보군에 대해 추가로 다수 마하수에 대한 유동 해석을 진행하여 MDD를 도출하였고 이후 각 공력계수의 우선순위를 고려한 가중치를 부여하였다. 1순위인 최대양력계수에 0.5, 2순위인 항력계수에 0.35, 3순위인 MDD에 0.15를 부여하여 식 (8)과 같이 점수를 산정하였다.
이 점수를 기준으로 반응면의 전역 탐색을 통해 선정된 후보군 중 가장 높은 점수를 얻은 상위 5개의 익형에서 비정상적인 형상을 제외하고 최종 익형을 선정하였다.
4. 전산 해석 및 최적화 결과
4.1 최적화 익형 형상 정보
각 익형의 공력계수에 대해 반응면을 구성한 결과, p-value는 2.2e-16 미만이면서 0.95 이상의 과 를 가지는 높은 신뢰도를 가진 반응면이 도출되었으며 반응면의 신뢰도는 Table 5와 같다. 선정된 후보군에 대해 목적 함수를 적용하여 와 을 도출한 후, 식 (8)에서 제시한 계산식에 따라 가장 점수가 높은 상위 5개의 익형을 선정한 후 과도한 굴곡이나 구불구불한 형상이 존재하는 비정상적인 형상을 제외하고 가장 높은 점수를 가진 익형을 선정하였다.
Table 5.
Validity of response surfaces
최종적으로 선정된 익형 형상은 Fig. 6과 같다. 최대양력계수가 1순위로 최적화되었기 때문에 모든 최적화된 익형은 캠버의 크기가 증가하였고 Tip 및 Outboard 영역 익형은 앞전의 두께가 증가하였다.
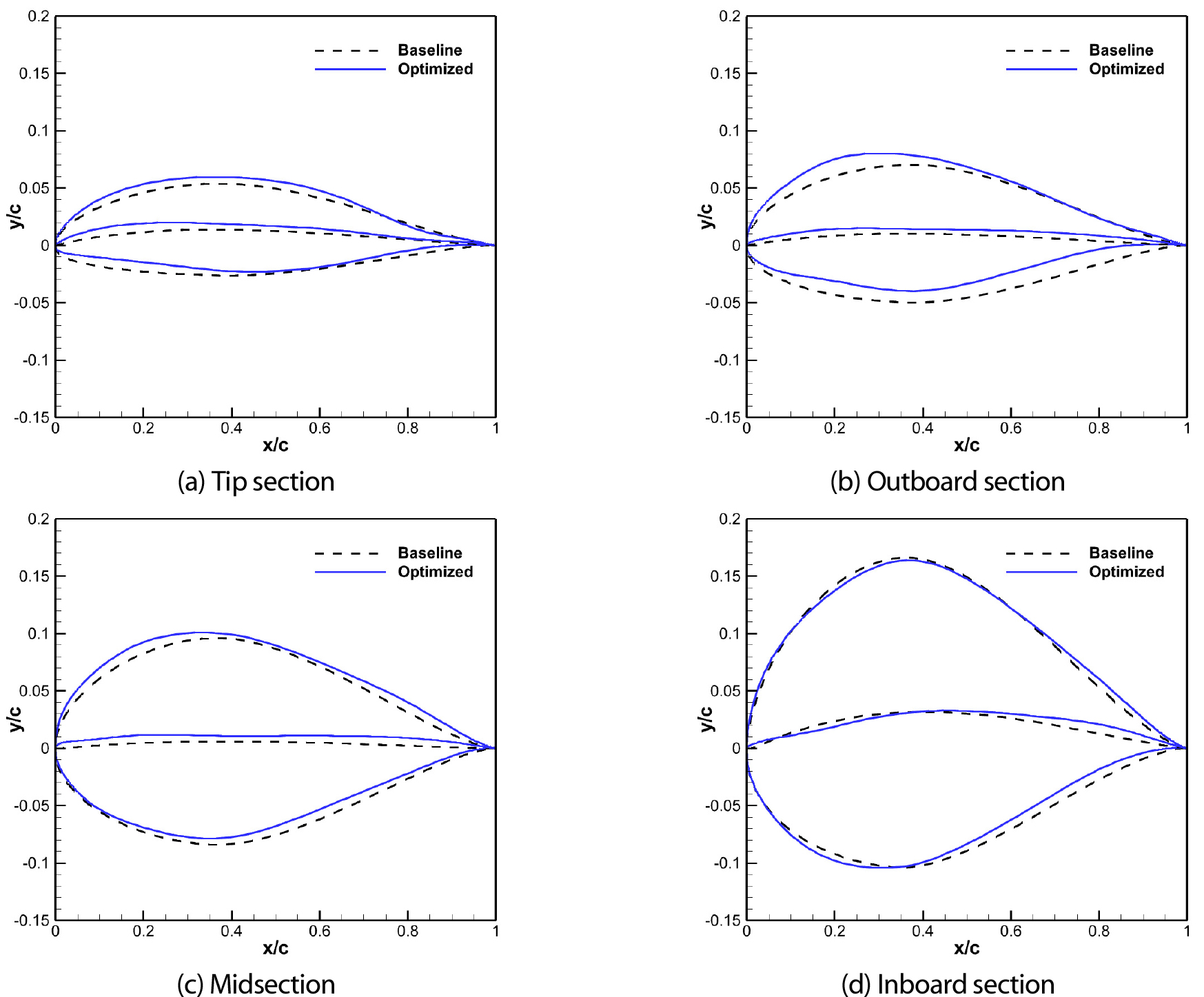
Tip 영역 익형은 앞전과 중간 영역에서 캠버가 증가하여 최대캠버는 기저형상의 1.38c%보다 0.62%p 증가해 2.00c%를 가지며, 두께비는 8.0%c에서 8.2%c로 증가하였다. 캠버와 두께비의 증가는 최대양력계수의 증가를 위해 변형된 결과로 판단된다. 뒷전의 두께는 얇아졌으며 이는 항력계수의 감소와 양항비의 증가를 위한 것으로 판단된다.
Outboard 영역 익형은 전체 영역에서 캠버가 전반적으로 증가하였고 최대캠버는 기저형상의 1.02c%보다 1.21%p 증가한 2.23%c이다. 두께비는 0.1%p 감소하였다. 앞전 부근의 두께가 증가하였고 뒷전의 두께는 얇아졌으며 이러한 최적화 방향은 양력계수를 향상시키면서 항력계수의 증가를 지연시키는 Tip 익형의 최적화 경향과 일치한다.
Midsection 영역 익형 또한 전체 영역에서 캠버가 전반적으로 증가하였고, 최대캠버는 0.60%c에서 1.20%c로 증가하였으며 앞전 반지름이 증가한 것이 확인된다. 앞전 반지름은 통상 양력계수의 향상을 불러오는 것으로 알려져 있다. 두께비는 0.05%p 감소했으며 큰 변화가 없었다. Inboard 영역 익형은 뒷전 영역에서 캠버가 증가하였고 최대캠버는 기저형상의 3.14c%에서 0.1%p 증가해 3.24%c를 가진다. 두께비가 27.0%c에서 26.7%c로 0.3%p 감소하여 항력이 감소하였다.
4.2 최적화 결과
Table 6에서 각 익형의 성능 향상 정도를 정리하였다. 캠버 크기가 커져 는 Tip 및 Outboard 영역의 익형의 경우 기저익형에 비해 약 25% 향상되었고 Midsection 및 Inboard 영역의 익형은 각각 6.2%와 5.8%가 향상되었다. 및 MDD는 목표 최적화 조건에서 1~2% 가량 감소하여 큰 저하 없이 유지되었다. 항력 성능이 유지되면서 이 증가함에 따라 최대 양항비 는 Tip 및 Outboard 영역의 익형은 10%, Midsection 익형은 5% 증가하였다. Inboard 영역의 익형은 가 20.5% 증가하여 모든 영역에서 가장 큰 증가폭을 보였으며 이는 최대캠버 크기가 소폭 증가하여 양력계수가 증가하면서도 두께비가 얇아져 항력이 감소한 영향으로 해석된다.
Table 6.
Performance comparison between baseline and optimized airfoils
Fig. 7에서는 기저익형과 최적화된 익형의 성능을, Fig. 8에서 기저익형과 최적화된 익형의 성능을 받음각에 대해 각각 도시하여 비교하였다. 캠버가 증가하여 기저익형에 비해 동일한 받음각에서 큰 양력계수를 가지며, Tip 및 Outboard 영역 익형은 및 를 가지는 받음각의 크기가 증가하여 실속이 지연되었다. 따라서 일반 회전익기 익형에 비해 틸트로터 익형에 적합한 성능인 고양력 및 고양항비를 가지는 방향으로 익형의 최적화가 진행된 것을 확인할 수 있다.
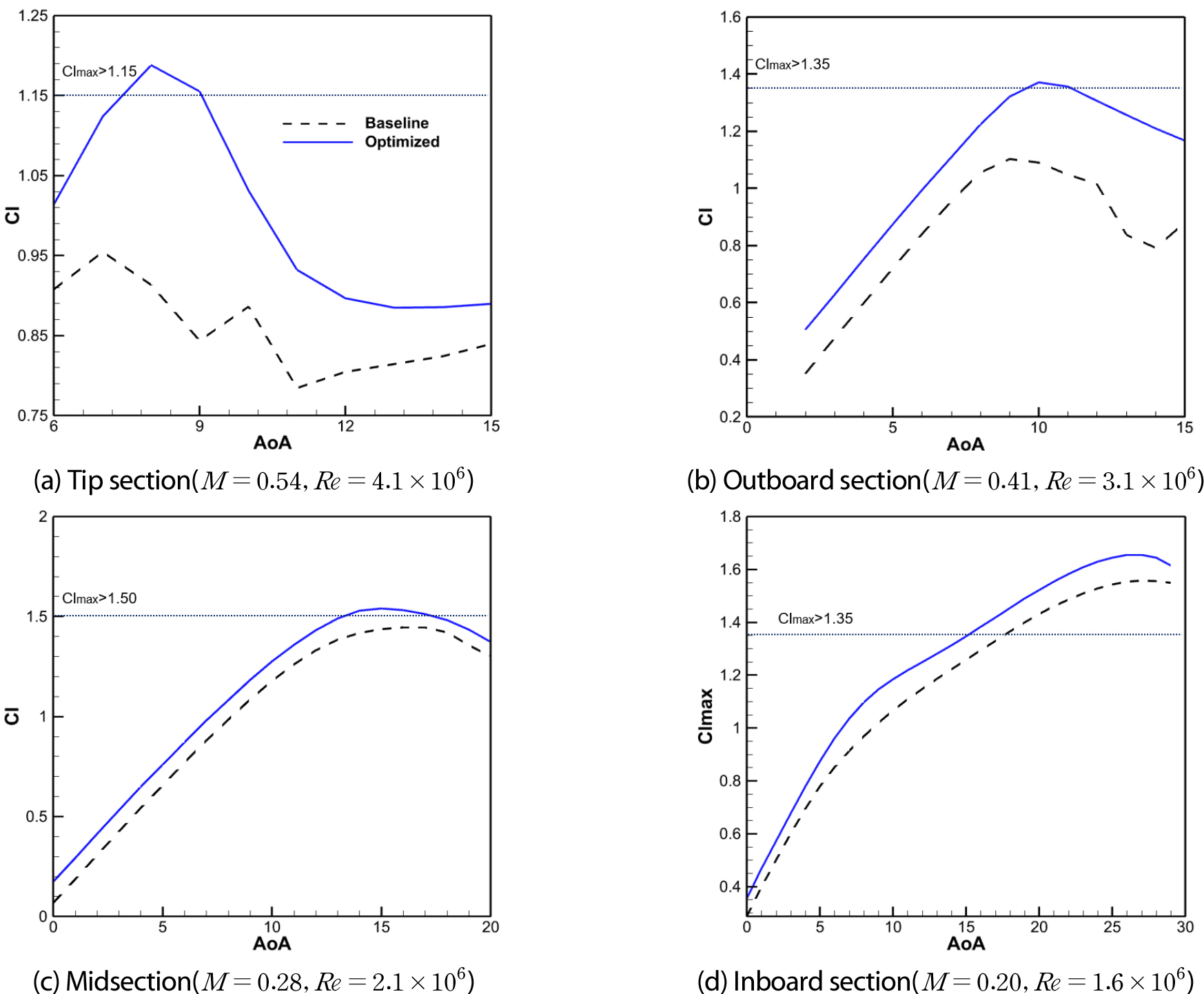
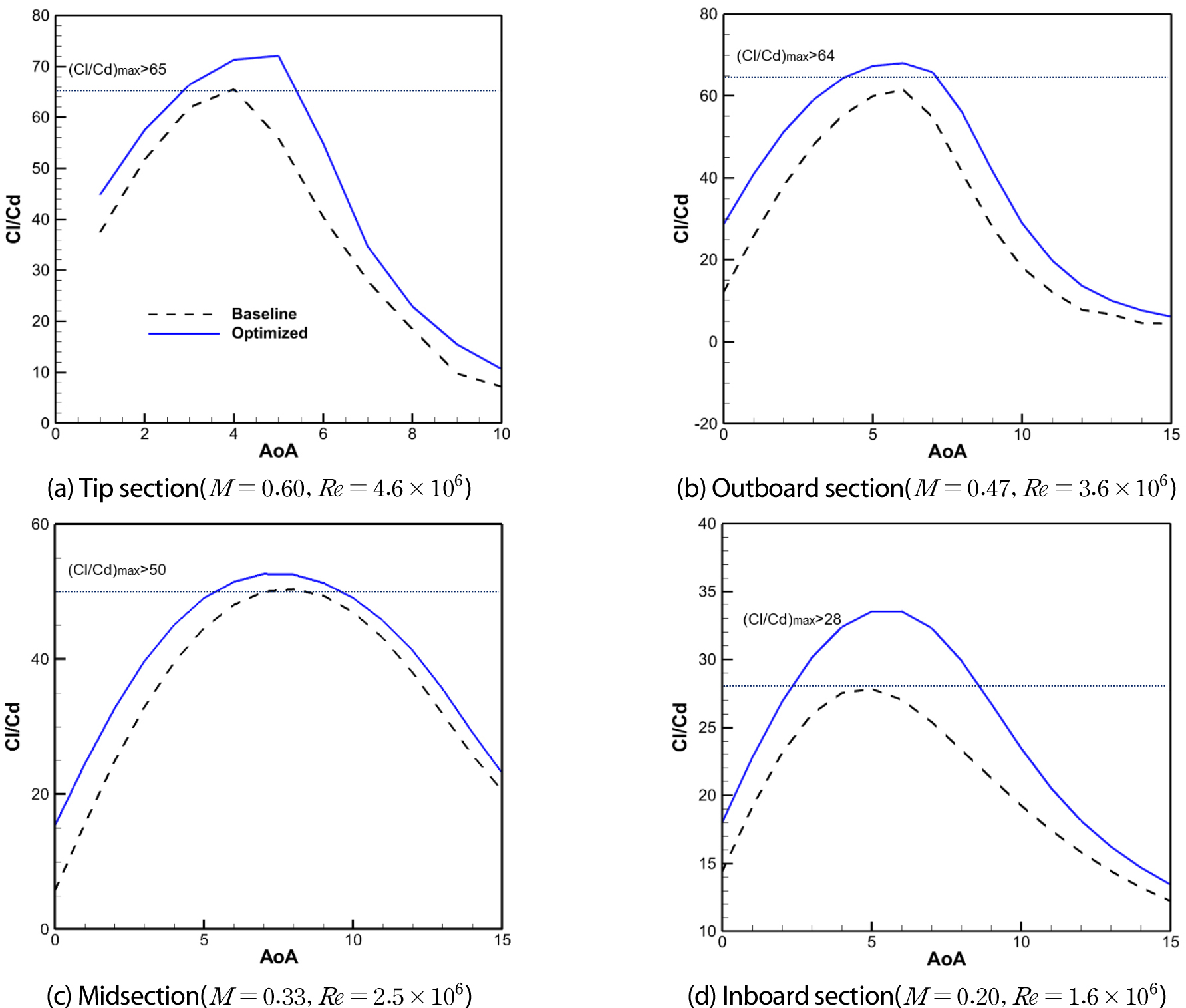
Fig. 9에 최적화가 완료된 익형의 MDD, 및 성능을 도시하였다. 최적화가 완료된 익형은 기저익형의 MDD가 거의 유지된 상태에서 및 가 향상된 것을 확인할 수 있다.
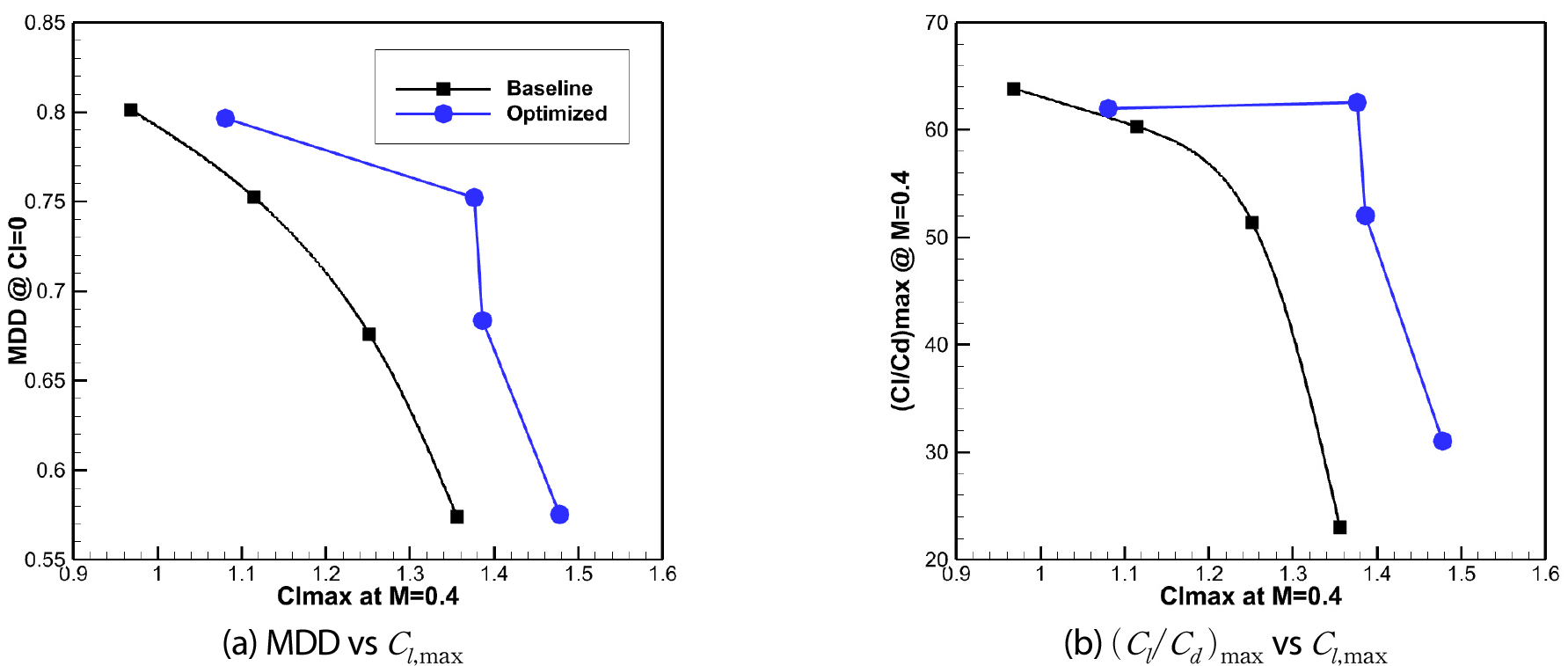
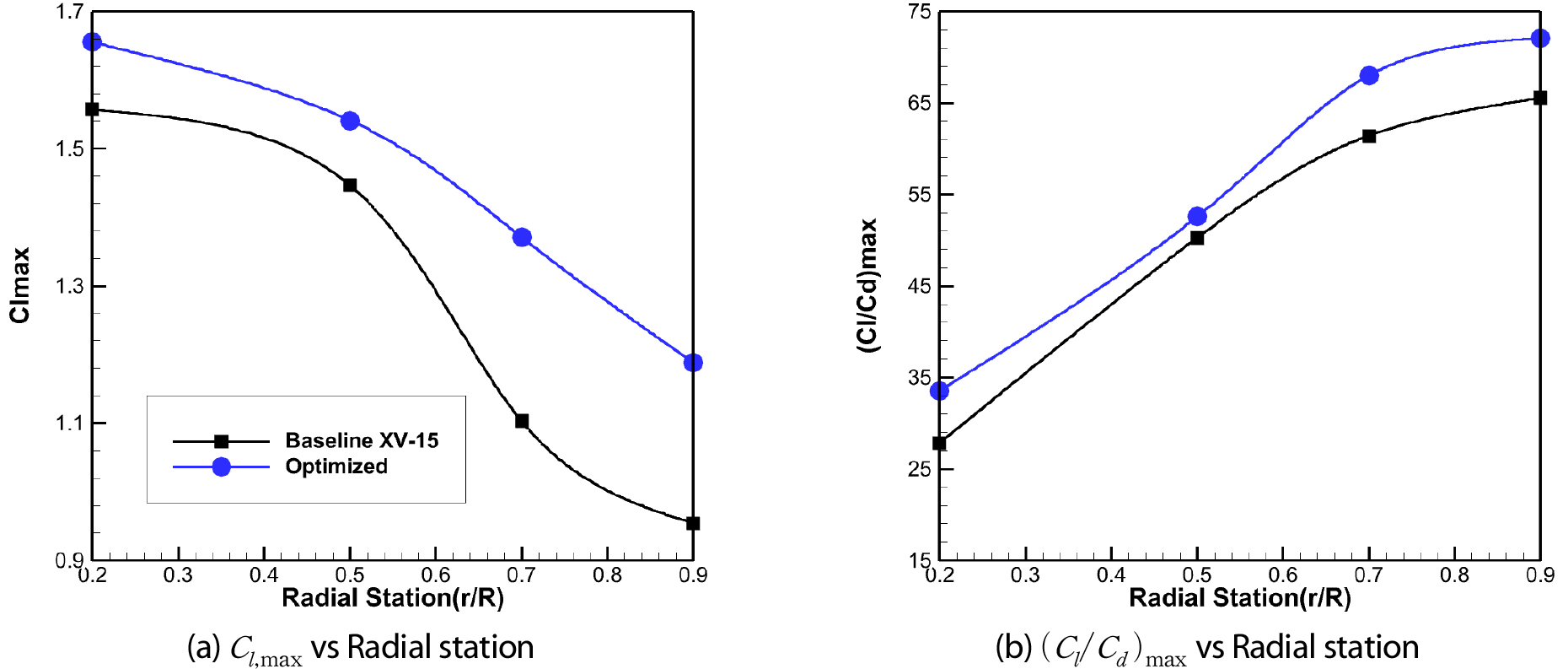
Fig. 10에 기존의 NACA 64 계열 익형을 사용하는 XV-15 프롭로터의 익형 공력계수와 최적화된 익형이 적용된 프롭로터의 익형 공력계수를 비교하였다. 양력성능인 와 가 전체 영역에 대해 향상되었다.
5. 결 론
본 연구에서는 XV-15 틸트로터 항공기에 사용되는 프롭로터의 운용 조건에 적절하도록 4개의 NACA 64 계열 익형의 전산해석 및 최적설계를 수행하였다. 익형 최적화 과정에 앞서 V-22 Osprey의 익형 최적화 사례를 조사하여 틸트로터용 익형은 메인로터용 익형에 비해 비교적 큰 양력계수를 필요로 하며, 공력계수의 최적화 우선 순위는 천이비행 후퇴면에서의 , 순항속도 조건에서의 , 최대속도 조건에서의 MDD, 제자리비행 조건에서의 양항비 순임을 확인하였다.
기저익형에 대해 위아래 표면과 함께 캠버를 직접적으로 조절하는 Hicks-Henne 함수를 적용하여 14개 변수에 대한 형상 변형을 진행하였다. 2차 반응표면기법을 통해 입력값이 형상 변형 변수이며 출력값이 익형의 공력계수인 메타모델을 생성하였다. 반응표면의 신뢰성 검증 결과 모든 공력계수에 대해 와 값이 0.95 이상을 만족하였다.
문헌 조사 결과를 토대로 4개의 공력계수에 대한 목표치를 설정하였다. 를 최대화하고 를 최소화하는 목적 함수를 설정하였고, 과도한 피칭모멘트와 형상 변형을 막기 위해 및 형상 관련 구속조건을 추가로 설정하였다. 공력계수에 대한 가중치를 부가하여 총점을 계산하였고 후보군을 도출한 후 최종 익형을 선정하였다. 최종적으로 선정된 익형은 공통적으로 기저익형에 비해 최대캠버의 크기가 증가했다. Tip 영역과 Outboard 영역 익형은 앞전 두께비가 소폭 증가하였고 뒷전 두께비가 얇아졌다. 가장 얇은 익형인 Tip 영역 익형은 최대두께비가 증가하였고, 나머지 영역의 익형은 최대두께비가 감소하였다.
익형의 를 우선 순위로 하여 익형의 형상을 최적화할 경우 캠버의 크기가 커지며, 통상 큰 캠버는 의 증가와 MDD의 감소를 야기하여 항력성능의 저하로 이어진다. 이 때 를 1순위 최적화 목표로 설정하되 과 캠버를 구속조건으로 설정하여 최적화를 진행할 경우 항력성능의 저하를 최소화하면서 가 크게 향상된 익형을 얻을 수 있음을 확인하였다.
