

1. 서 론
2. 리프트-크루즈형 비행체 형상
2.1 요구도 및 임무형상
2.2 형상 도출
2.3 최종 형상
3. 공력 DB 구축 방법
3.1 공력 DB 구조
3.2 공력 DB 구축 범위
3.3 공력 DB 구축 도구
4. 공력 DB 구축 결과 및 평가
4.1 공력 DB 구축 결과
4.2 공력 DB 평가
5. 결 론
1. 서 론
도심 환경 운용을 목표로 하는 도심항공교통(urban air mobility, UAM) 비행체는 버티포트를 이용하는 수직이착륙기 형태로 개발되고 있으며, 소음과 공해물질 발생을 저감하고 안전성을 확보하기 위해 전기에너지를 동력원으로 사용하는 분산추진 시스템을 적용하고 있다. 이러한 전기동력 수직이착륙기는 추진시스템 형태에 따라 멀티콥터(multicopter), 추력편향(vectored thrust), 리프트-크루즈(lift-cruise) 등으로 세분화할 수 있다[1]. 비행체 개발뿐만 아니라, UAM 상용화를 위한 교통관리 체계, 기반시설, 인증체계 구축에 관한 연구도 증가하고 있다. 미 연방항공청(Federal Aviation Administration, FAA)은 UAM 운용의 역할과 책임, 항공회랑 규정 등을 담은 운용 개념서 ver. 1과 ver. 2를 제안하였으며, NASA(National Aeronautics and Space Administration)는 FAA와의 협력하에 UAM 운용 안전성 및 통합운용 검증을 위한 국가 차원의 실증 프로그램인 national campaign을 진행하고 있다[2,3,4]. 한국에서도 국토교통부가 기상 및 도시 환경에 적합한 운용기준 마련을 위해 한국형 UAM(K-UAM) 운용 개념서를 발표하였으며, 이에 따라 한국항공우주연구원(Korea Aerospace Research Institute, KARI)의 주도하에 실증 프로그램인 K-UAM 그랜드챌린지를 수행하고 있다[5,6].
비행 시뮬레이터는 실제와 유사한 가상환경에서 실증 시나리오를 시뮬레이션하여 비행체 운용의 안전성과 운용절차를 검증하는 효과적인 도구로 사용되고 있다[7,8,9]. 시뮬레이터 개발을 위해서는 동역학 모델, 제어기, 외부 대기 환경 모델 등을 구현해야 하며, 그중 동역학 모델을 위한 비행체의 특성 데이터인 공력 데이터베이스(database, DB)는 시뮬레이션의 정밀도에 큰 영향을 미치는 요소로 고려된다. 따라서 비행 시뮬레이터의 신뢰성 확보를 위해서는 다양한 형태로 개발되고 있는 각 UAM 비행체의 특성을 반영한 공력 DB 구축이 선행되어야 한다. 다수의 프로펠러가 구동되는 조건에서 수직이착륙 및 천이 기동 시에 발생하는 복잡한 공력 특성을 정확하게 분석하거나 반영하기 위해서는 풍동실험 혹은 고충실도의 전산유체역학(computational fluid dynamics, CFD) 해석이 요구된다. 하지만 시뮬레이터 초기개발 단계에서부터 이를 고려한 대량의 공력 데이터를 획득하기에는 어려움이 따르므로 신속한 해석 기법들을 활용하여 한정된 시간과 자원 내에 비행체의 공력 성능을 합리적으로 대변할 수 있는 공력 DB 구축이 요구된다.
본 연구에서는 시뮬레이터 탑재용 UAM 비행체의 공력 DB를 시간 효율적으로 구축하기 위해 성분합성법(component build-up method, CBM) 개념을 적용한 DB 구조를 정의하고, 전진 및 제자리 비행 모드로 유형을 분류하였다. 또한, 다수의 공력 데이터 획득에 신속해석기법을 활용함으로써 DB 구축에 필요한 시간을 절감하였다. 이를 통해 비행 시뮬레이터 초기개발 단계에 사용할 공력 DB를 구축하였으며, 슬라이딩 메쉬 기법(sliding mesh method, SMM)과 이동 참조 프레임(moving reference frame, MRF) 기법을 사용한 CFD 해석과의 비교분석으로부터 구축한 DB의 정확도 및 활용 가능성을 평가하고 고도화 필요성에 대해 검토, 논의하였다.
2. 리프트-크루즈형 비행체 형상
리프트-크루즈형 비행체는 회전익기와 고정익기의 개념을 결합한 형태이다. 이착륙 시에는 리프트 프로펠러의 추력으로 수직이착륙하며, 천이 단계에서는 리프트 프로펠러와 추진 프로펠러가 동시에 구동된다. 리프트 프로펠러는 비행 속도가 증가함에 따라 회전수가 감소하며 천이 단계가 완료되면 파드에 정렬 및 정지하고 추진 프로펠러만으로 고정익 항공기와 같이 전진 비행한다.
2.1 요구도 및 임무형상
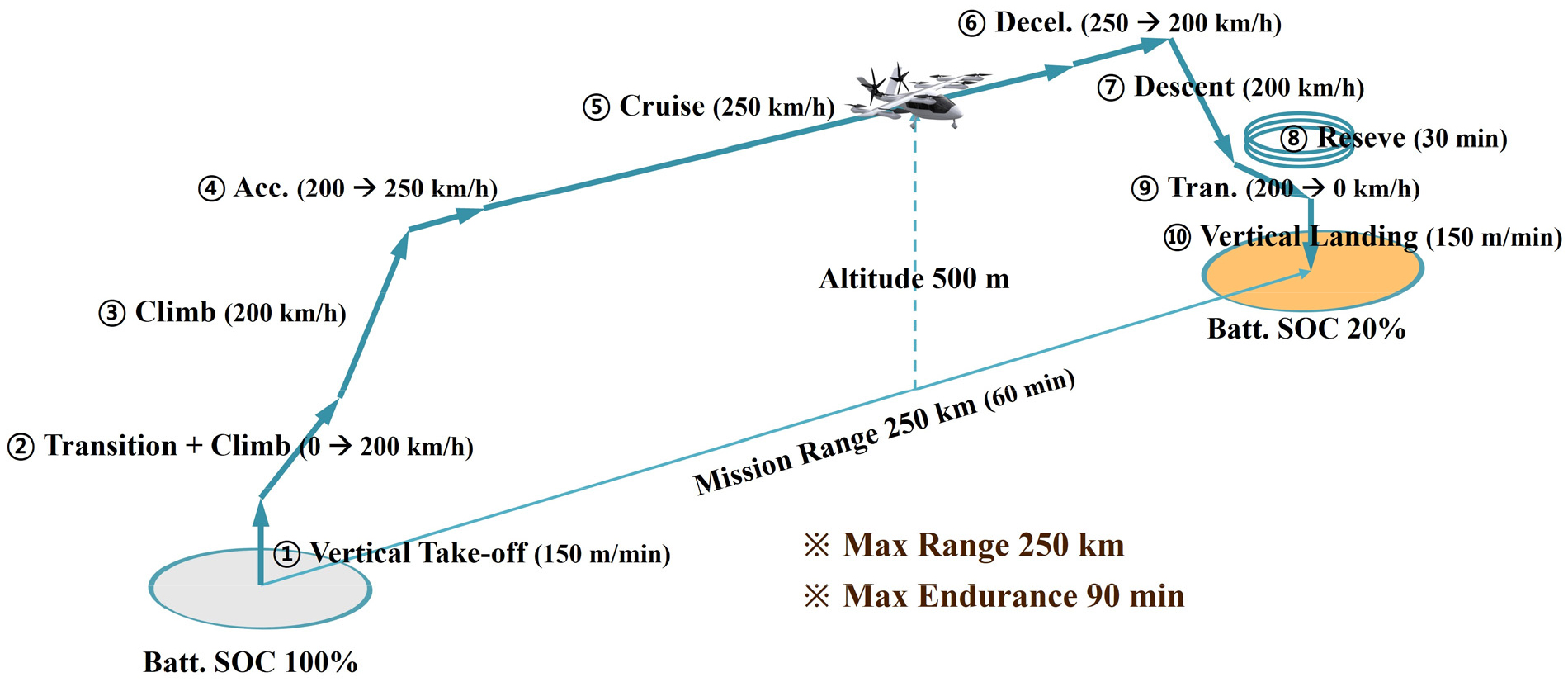
KARI에서 개념설계를 수행한 5인승급 OPPAV(optionally piloted PAV)의 요구도를 바탕으로 리프트-크루즈형 비행체의 요구도를 설정하였으며, 이를 Table 1에 나타내었다[10,11]. 전기동력 수직이착륙기의 형태를 가지고 5인승 기준 500 kg의 유상하중을 탑재하며, 250 km/h의 순항속도로 250 km 이상의 거리를 비행하는 것을 기본성능으로 한다. 리프트-크루즈형 비행체의 임무형상을 Fig. 1에 도시하였다.
Table 1.
Requirement for lift-cruise type UAM aircraft
2.2 형상 도출
KARI가 1인승급 OPPAV 개발을 통해 구축한 개념설계 및 사이징 기법을 이용하여 설계한 5인승급 OPPAV 형상을 변경하여 리프트-크루즈형 비행체 형상을 도출하였다[12]. 제자리 비행 시 동력은 동일하다고 가정하여 4개의 전방 틸트 프로펠러를 리프트 프로펠러로 유형을 변경하였으며, 리프트 프로펠러는 2엽의 블레이드를 갖는 OPPAV 용 리프트 프로펠러와 동일한 형상을 적용하였다. 미익을 V-꼬리날개 형태로 변경하고, 각 V-꼬리날개에 추진용 프로펠러를 적용하였다. 5엽의 블레이드를 갖는 추진 프로펠러 형상은 순항 시 필요 추력이 OPPAV와 동일한 수준이라는 가정하에 OPPAV용 틸트 프로펠러 블레이드를 크기 변경 및 비틀림 각 분포 조정을 통해 설계하였다. OPPAV의 전방 틸트 프로펠러 구동 메커니즘 제거에 따른 무게 감소와 추진 프로펠러 및 구동 모터 추가에 의한 무게 증가분이 유사하여 서로 상쇄되는 것으로 가정하였다.
2.3 최종 형상
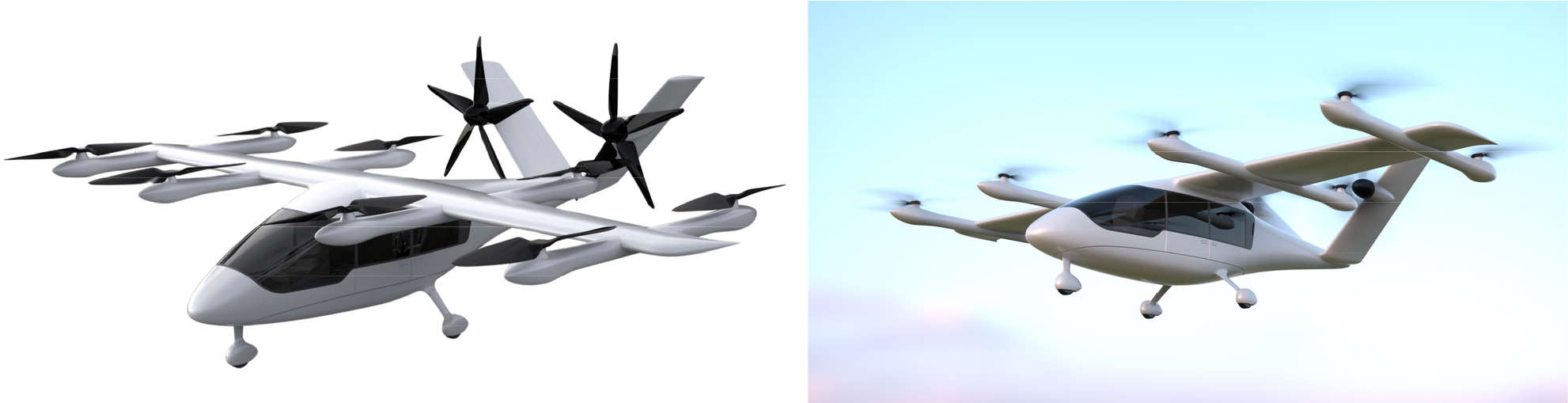
리프트-크루즈형 비행체의 형상을 Fig. 2에 도시하였다. 조종면으로는 주 날개에 플래퍼론과 V-꼬리날개에 러더베이터를 가지며, 지상 또는 버티포트에서 이동할 수 있도록 3개의 고정식 랜딩기어로 구성되어 있다. 추진 장치로는 분산전기추진시스템으로 구동되는 8개의 리프트 프로펠러와 2개의 추진 프로펠러가 장착되며, 피치각은 고정이며 회전수 제어를 통해 추력 제어를 수행한다.
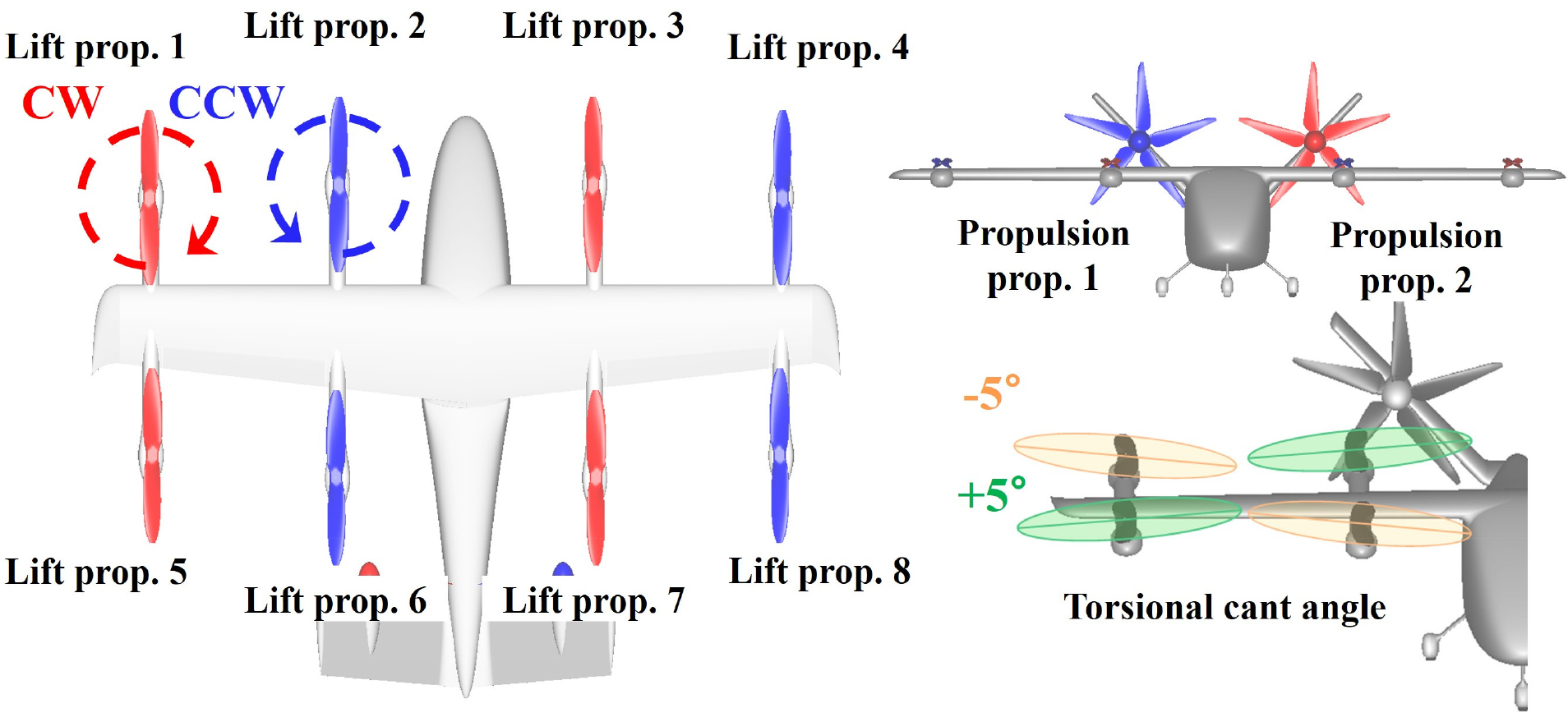
비행체의 기본 제원은 Table 2와 같으며, 날개 스팬 10.5 m, 총길이 9.23 m이며, 총중량은 2,800 kg이다. 리프트 프로펠러와 추진 프로펠러의 반경은 1.33 m로 동일하며, 블레이드 익형으로는 Clark Y를 적용하였다. 리프트 프로펠러는 2개의 블레이드를 가지며, 추진 프로펠러는 5개의 블레이드로 구성된다. 프로펠러 회전 방향을 Fig. 3에 나타내었으며, 리프트 프로펠러의 경우 제자리 비행 시의 조종 안정성을 고려하여 ±5°의 torsional cant angle을 가진다.
Table 2.
Specification of lift-cruise type UAM aircraft
3. 공력 DB 구축 방법
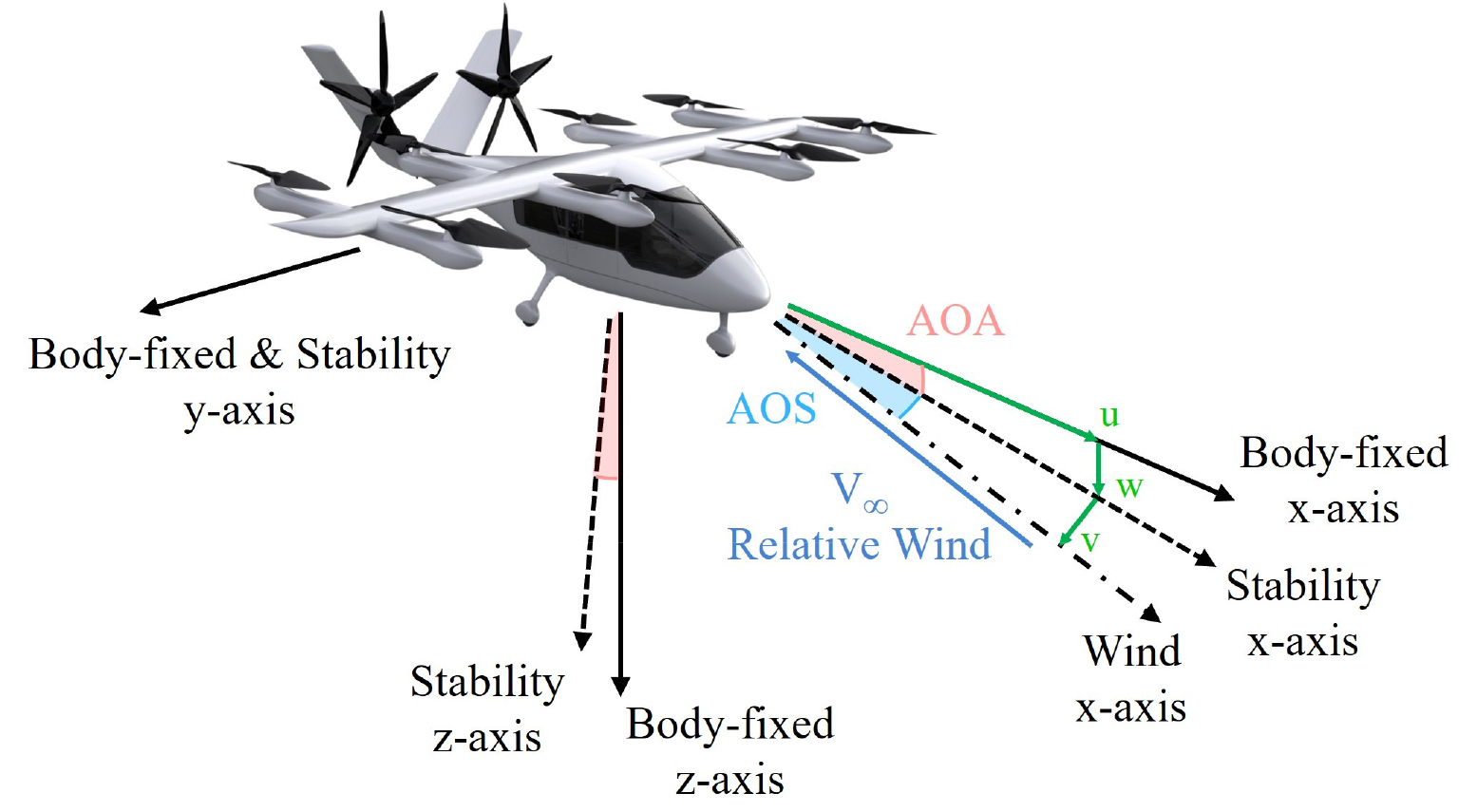
공력 DB의 좌표계는 Fig. 4와 같이 정의하였으며, 기체 고정 좌표축(body-fixed axis)과 안정성 좌표축(stability axis)을 기준으로 DB를 구축하였다. 리프트-크루즈형 비행체의 형상은 가상환경 및 시뮬레이터에 탑재될 가상의 형상으로 체계 개발 대상이 아니므로 기본, 상세 설계 등을 수행하지 않았다. 따라서 DB에서는 비행체의 노즈팁 지점을 모멘트 기준점으로 사용하였으며 추후 시뮬레이터 내 운동 모델링 상에서 비행체 무게중심 설정 및 변경에 유연하게 대응 가능하도록 하였다.
3.1 공력 DB 구조
비행체에 작용하는 공력 및 공력 모멘트는 받음각, 옆미끄럼각 뿐 아니라 3축 방향의 자세각 변화율(각속도), 조종면 작동, 프로펠러 구동에 의한 공력 간섭 등의 다양한 요인들에 따라 변화한다. 이러한 요인들을 동시에 고려할 경우 모든 독립변수들의 조합에 대해 공력 데이터를 획득해야 하므로 상당한 해석 시간과 자원이 요구될 수 있으며, 특정 비행조건에서의 공력 특성에 대한 적절성을 검토하기 어렵다. 따라서 CBM 개념을 적용하여 각 요인에 의한 영향을 독립적으로 고려한 DB를 개별적으로 구축하고, 이들을 종합하여 비행체 전체의 공력을 산출 및 예측하도록 하였다.
전체 공력 DB의 구조는 기체 DB와 프로펠러 DB로 분리하여 구성하였다. 기체 DB는 프로펠러를 제외한 형상인 기본 기체에 대한 정적(static) 6분력 계수를 기준값(baseline)으로 정의하고, 조종면(control surface, CS) 작동에 의한 6분력 계수 변화량, 자세각 변화율에 의한 동미계수(dynamic derivative), 기체-프로펠러 간의 간섭 효과 및 지면효과 등으로 구성요소들을 식별할 수 있다. 본 논문에서 소개하는 기체 DB의 경우 우선적으로 식(1)과 같이 기체 정적 6분력 계수에 조종면 작동에 의한 6분력 계수 변화량, 동미계수을 더함으로써 기체의 최종 공력 계수를 산출하도록 설계하였다. 프로펠러 DB는 추진 프로펠러와 리프트 프로펠러의 6분력 계수를 기준값으로 하고 기체-프로펠러 간 간섭 효과, 프로펠러-프로펠러 간 간섭 효과를 추가요소로 고려할 수 있다. 여기서는 우선 식(2)와 같이 프로펠러 6분력 계수만으로 구성하였다. 프로펠러 DB에 탑재하는 프로펠러 6분력 계수는 기체 고정 좌표계를 기준으로 하는 힘과 모멘트 계수로 정의한다. 프로펠러는 기체 좌표계에 대해 붙임각, 틸트각, cant angle 등 상대적인 각을 가질 수 있어 일반적으로는 기체 고정 좌표계의 특정 축과 프로펠러 회전축이 일치하지 않으며, 해당 축 방향의 힘과 모멘트가 프로펠러의 추력과 토크를 의미하지는 않는다. 틸트 프롭과 같이 회전축이 가변인 경우, 각 프로펠러마다 회전축 기준 좌표계를 개별적으로 정의하여 추력과 토크 그리고 나머지 성분의 힘과 모멘트들로 DB를 구성한 후, 유동(비행)조건이 주어지면 회전축 방향 및 좌표계 정보를 고려하여 프로펠러에서 발생하는 힘과 모멘트들을 테이블 참조 방식으로 얻고 이를 다시 기체 고정 좌표계의 6분력으로 변환하여 운동 모델링에 적용하게 된다. 하지만 회전축 방향이 고정된 경우 프로펠러에서 발생하는 기체 고정 좌표계에 대한 6분력을 그대로 DB로 구성하면 운동 모델링 측면에서 모든 프로펠러들에 대해 매번 불필요한 변환을 반복 수행하지 않아도 된다. 따라서 시뮬레이터의 운동모델링을 담당하는 기관의 요구사항에 따라 프로펠러 성능 DB는 붙임각에 관계없이 운용 조건(속도, 받음각, 옆미끄럼각, RPM)에 따라 기체 고정 좌표계를 기준으로 각 프로펠러에서 발생하는 6분력 계수를 그대로 구성하는 것으로 정의하였다.
여기서, 𝜙는 3축 성분의 힘과 모멘트를 나타내며 과 는 각각 조종면과 프로펠러의 개수를 나타낸다. 식(3, 4, 5, 6)는 기체 및 프로펠러 6분력 계수 도출 시 사용된 식이며, 무차원시 사용된 값의 정의와 수치는 Table 3에 나타내었다.
는 동압을 의미하며, 동미계수 산출 시 사용된 , , 은 각각 롤, 피치, 요 변화율을 나타낸다. 또한, 𝜌는 밀도, n은 프로펠러의 회전속도(rev/s)를 나타내며, k는 3축 방향을 뜻한다.
Table 3.
Reference values for calculation of aerodynamic coefficients
| S | Reference area | 15.75 m2 |
| b | Span | 10.5 m |
| c | Mean aerodynamic chord | 1.52 m |
| D | Propeller diameter | 2.66 m |
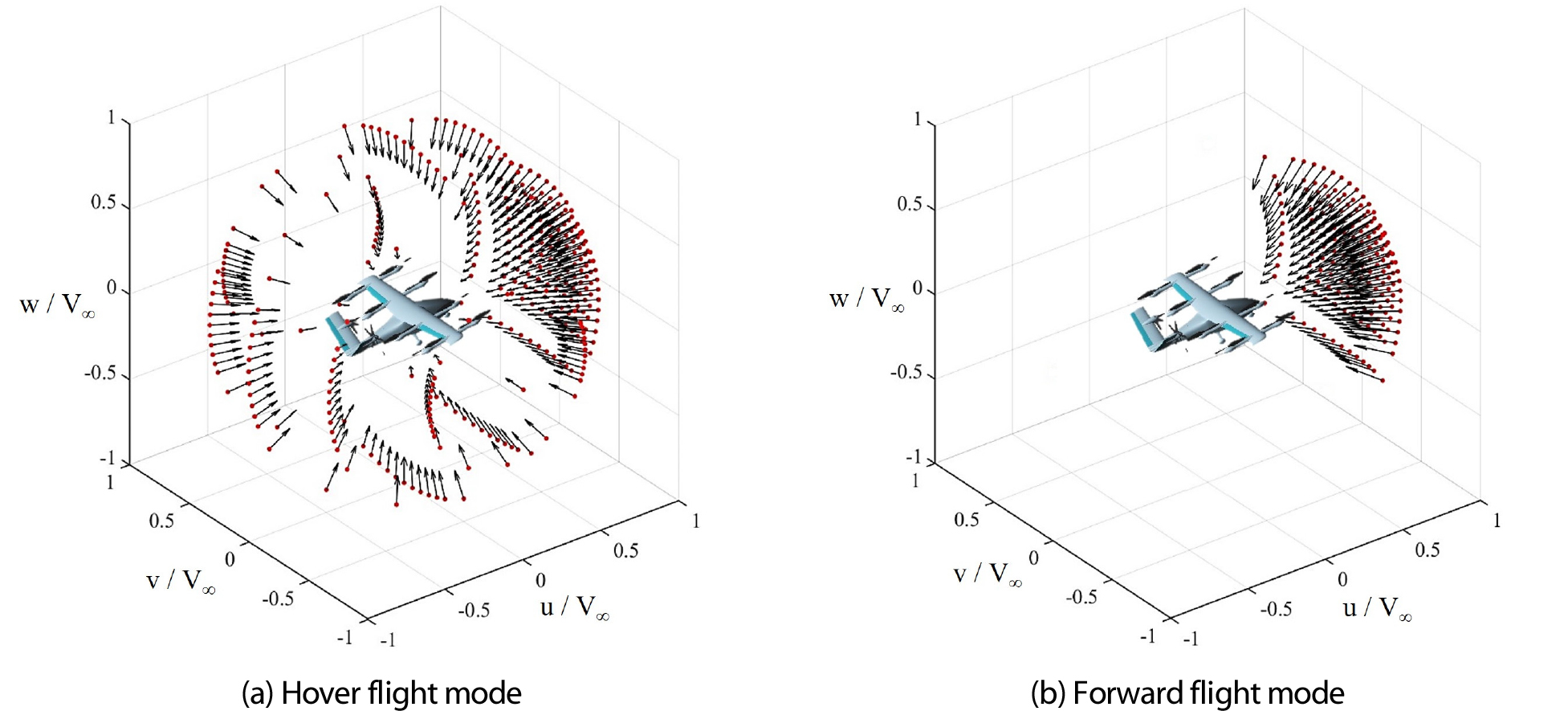
모든 방향의 풍향에 대해 DB를 구축할 경우, 전진 비행 조건에서는 사용되지 않는 비운용 영역까지 포함한 방대한 양의 공력 데이터를 생성해야 하므로 불필요한 시간과 자원이 상당 수준 소모된다. 따라서 비행체의 운용 개념과 임무 형상을 고려하여 DB의 유형을 전진 및 제자리 비행 모드로 구분함으로써 데이터 구축점 개수를 절감하고자 하였으며[13], 각 비행 모드에 대해 해석 조건과 범위를 Fig. 5에 도시하였다. 제자리 비행 모드의 경우 이착륙 시 측, 배풍 등 다양한 풍환경을 고려하여 전 범위의 받음각(angle of attack)과 옆미끄럼각(sideslip angle)에 대응하도록 구성하였으며, 전진 비행 모드는 천이 비행 및 순항 비행 중 예상되는 비행조건을 반영하여 제한된 받음각과 옆미끄럼각을 고려하였다.
3.2 공력 DB 구축 범위
UAM 비행체의 비행 특성, 요구도와 임무형상을 반영하여 비행 모드별 공력 DB의 독립변수를 선정하고 간격과 범위를 설정하였으며, 이를 Table 4에 나타내었다. 전체 운용 영역에서 마하수는 최대 약 0.25 수준으로 공력 계수에 대한 압축성 효과의 영향은 미미한 것으로 간주하여 독립변수에서 마하수를 제외하였다. 최대 운용고도가 약 500 m 이하 수준임을 고려했을 때 고도에 따른 레이놀즈수 변화는 비행속도에 따른 변화에 비해 크지 않은 것으로 간주하여 레이놀즈수를 대신하여 비행속도 자체를 독립변수로 설정하였다. 저속영역에서는 비행체의 수직이착륙 속도를 고려하여 0, 2 m/s를 선정하였으며, 도심풍 환경에 대응하고자 김포 공항 및 한강 지역의 평균 풍속을 고려하여 10 m/s를 추가하였다[14]. 고속영역의 속도는 실속속도, 순항속도, 최고속도를 고려하였다. 실속속도는 총 중량과 사전 탐색 해석을 통해 획득한 최대 양력계수로부터 40 m/s로 계산되었으며, 임무형상을 기반으로 순항속도는 70 m/s, 최고속도는 85 m/s로 설정하였다. 제자리 비행 모드는 저속영역만으로 구성하였으며, 전진 비행 모드는 저속영역과 고속영역을 모두 포함하였다.
Table 4.
Independent variables of aerodynamic DB and their range and value
3.2.1 기본 기체 6분력 계수
받음각, 옆미끄럼각, 속도를 독립변수로 고려하였다. 제자리 비행 모드는 다양한 풍환경 조건 모사 및 내풍성 평가에 대응 가능하도록 전 범위의 받음각 및 옆미끄럼각을 포함하였으며, 전진 비행 모드는 천이 비행 및 순항 비행 시 예상되는 자세각 및 비행경로각 등을 고려하여 –30~30°의 제한된 범위를 갖도록 설정하였다.
3.2.2 조종면 작동에 의한 6분력 계수 변화량
제자리 및 수직 상승/하강 비행 시에는 프로펠러 회전수 제어만을 통해 비행체를 제어하므로, 조종면 작동으로 유의미한 공력 계수 변화를 유발 가능할 것으로 예상되는 전진 비행 모드에 대해서만 DB를 구축하였다. 조종면 작동에 의한 공력 계수 변화량은 비행 속도에는 크게 의존하지 않는다는 가정하에, 받음각, 옆미끄럼각, 조종면 변위각을 독립변수로 고려하였으며, 순항속도를 해석의 기준 조건으로 설정하였다. 받음각과 옆미끄럼각의 범위는 기본 기체 DB와 동일하며, 임무형상과 1인승급 OPPAV의 표준천이선도를 참고하여 조종면 변위각의 범위는 –30~30°으로 설정하였다.
3.2.3 동미계수
동미계수 DB의 경우 독립변수 및 범위를 기본 기체 DB와 동일하게 설정하였다. 동미계수는 받음각 및 자세 변화율에 의해 유발되는 공력 계수의 변화를 미분계수로 나타낸 것으로 저속 비행 시에는 기체에 작용하는 동압이 낮아 동미계수에 의한 비행체의 공력 변화량은 프로펠러 회전수 제어에 의해 발생하는 힘과 모멘트 크기에 비해 미소한 값임을 고려하여 전진 비행 모드에 대해서만 DB를 구축하였다.
3.2.4 프로펠러 6분력
기본 기체 DB의 비행조건 독립변수(비행속도, 받음각, 옆미끄럼각)에 프로펠러 회전속도를 독립변수로 추가하였으며, 회전속도을 제외한 독립변수들의 범위와 간격은 기본 기체 DB와 동일하게 설정하였다. 전통적인 고정익 항공기 추진용 프로펠러의 경우 상사성을 가정하여 추력계수와 토크계수를 전진비(advance ratio)에 대한 함수로 고려하고, 이에 따라 프로펠러 성능 DB의 독립변수를 전진속도와 회전속도 대신 전진비 하나로 구성하기도 한다. 본 연구에서 고려하는 대상 비행체의 운용 조건과 범위의 특성을 고려할 때, 모든 방향의 유입류 조건에 대하여 기체 고정 좌표계 기준 프로펠러의 6분력이 전통적인 추진용 프로펠러 성능 곡선과 같이 전진비에 대한 상사성을 갖는다고 보장할 수 없기 때문에 본 비행체의 경우 프로펠러 DB의 독립변수는 유입류 방향 외에 비행속도와 회전속도 두 개를 모두 갖는 형태로 구성하였다. 리프트 프로펠러와 추진 프로펠러의 정격(nominal) 회전속도는 각각 1200, 1000 RPM이며, 이를 기준으로 회전속도 값들을 선정하였다. 전진 비행 모드의 경우 주익의 양력 분담을 고려하여 리프트 프로펠러의 회전속도 최대값은 제자리 비행 모드 보다 낮게 설정하였다.
3.3 공력 DB 구축 도구
점성 효과를 포함한 공력 특성을 고려하기 위해 기본 기체의 6분력 계수는 RANS(Reynolds-averaged Navier-Stokes) 기반의 CFD 해석을 통해 획득하였으며, 나머지 공력 데이터의 경우 신속해석기법들을 활용하였다. 조종면 작동에 의한 6분력 계수 변화량 및 동미계수는 와류격자법(vortex lattice method, VLM) 기반 패널 해석을 통해 획득하였으며, 프로펠러 6분력 DB는 깃요소 운동량 이론(blade element momentum theory, BEMT) 기반의 인하우스 코드인 Improved BEMT를 사용하여 해석을 수행하고 구축하였다. 예상되는 최대 운용 고도가 500 m임을 고려했을 때, 고도에 따른 대기 밀도와 온도 범위 내에서는 레이놀즈수와 마하수 변화에 의한 비행체 공력 계수 변화는 매우 미미하다고 판단하여, 필요한 모든 공력 해석들은 표준대기조건에서 수행하고 공력 계수를 산출하여 사용하였다.
3.3.1 기본 기체 6분력 계수 해석
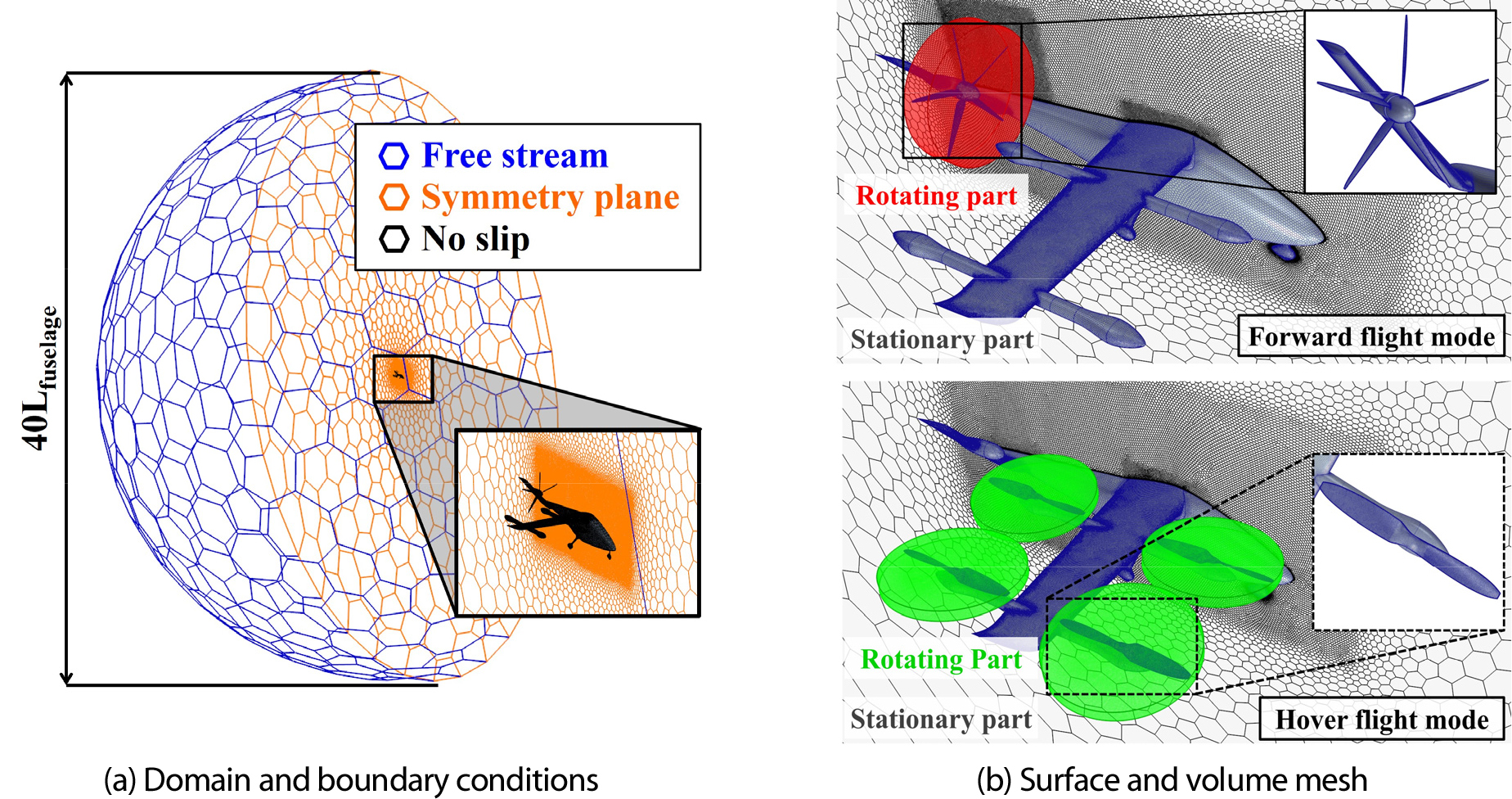
상용 CFD 해석 프로그램인 STAR-CCM+ v15.06을 사용하여 정상상태, 비압축성 유동에 대한 RANS 해석을 수행하였다[15]. 계산 영역은 Fig. 6(a)과 같이 기체를 중심으로 동체 길이의 40배를 지름으로 갖는 구형으로 설정하였으며, 원방경계의 경우 velocity inlet 조건, 비행체 벽면은 점착 경계조건을 부여하였다. 유동해석을 위한 격자는 STAR-CCM+에 탑재된 격자 생성 도구를 사용하여 다면체 및 프리즘 격자로 이루어진 비정렬 혼합 격자계로 구성하였으며, 저속영역은 wall resolved 격자(y+ ~ 2), 고속영역의 경우 wall function 격자(y+ ~ 80)를 사용하였다. 수치 기법으로는 공간에 대해 2차 정확도의 차분법을 사용하고, 난류 모델은 2방정식 모델인 k-ω SST를 적용하였다. 저속 조건인 속도 2 m/s에서는 레이놀즈수가 약 20만 수준에 해당하며, 표면에서 층류 경계층 형성과 박리 또는 천이 발생 등 상대적으로 복잡한 유동 현상들의 발생 가능성을 고려하여 난류-천이 모델의 적용을 고려할수도 있으나, 저속 조건 DB는 비행체가 제자리 비행 중인 상황에서 도심풍 환경을 고려하기 위한 경우로써 다수의 프로펠러가 유도하는 유입류와 후류에 의해 기체 주위에 복잡한 난류 유동이 형성되고 도심풍 또한 일반적인 경우 대비 난류강도가 높을 것으로 가정하여 완전 난류 모델을 동일하게 적용하였다. 격자 수렴성 평가를 위해 격자 조밀도에 따라 coarse, medium, fine 격자를 생성하고, 순항속도 조건에 대해 해석을 수행하였다. Intel Xeon Platinum 9242 2.30Ghz CPU 96코어를 사용하여 병렬 계산을 수행하고 그 결과를 Table 5에 나타내었다. DB 구축에 필요한 해석점 개수 및 해석 소요시간, 공력 성능 결과 등을 종합 고려하여 약 1,260만개 수준의 medium 격자를 해석 격자로 선정하였으며, 해당 격자를 Fig. 6(b)에 도시하였다.
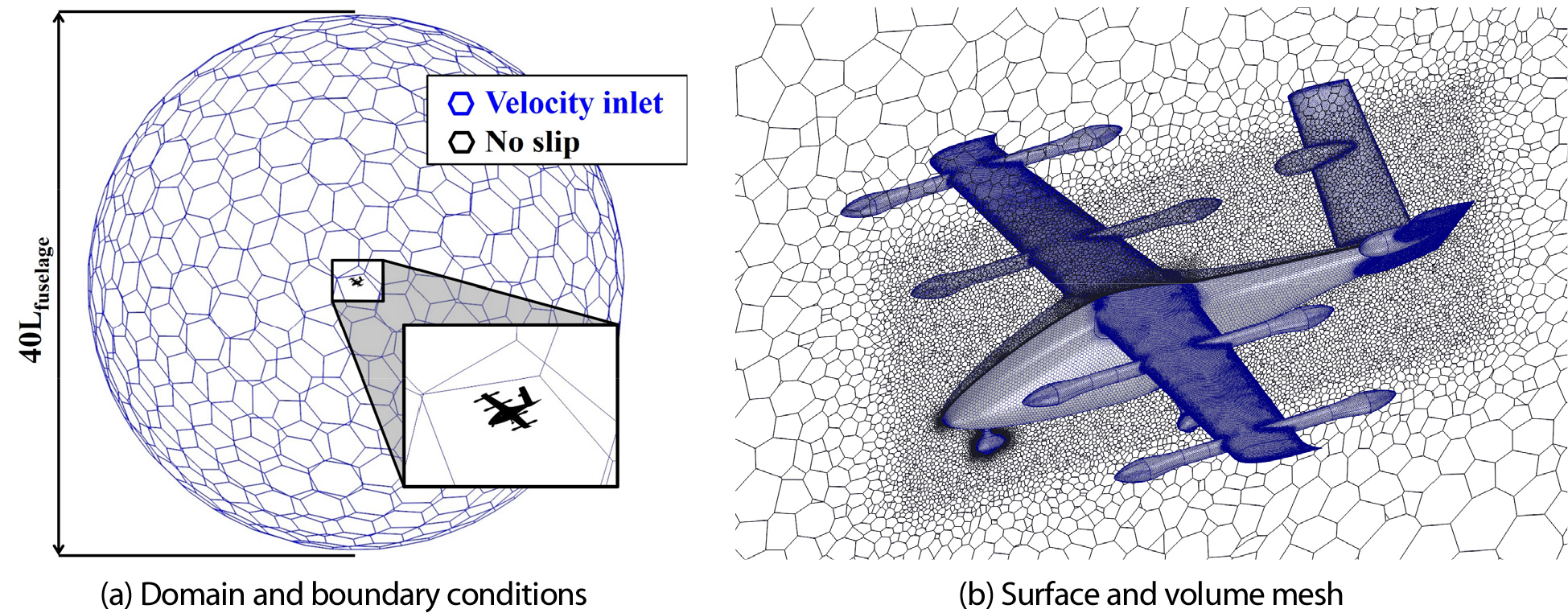
Table 5.
Results of grid convergence test
| Coarse | Medium | Fine | |
| No. of volume mesh | 3.9 M | 12.6 M | 20.5 M |
| Iteration | 2000 | ||
| Drag coefficient | 0.0284 | 0.0267 | 0.0265 |
| Computation time | 0.3 hrs | 1.1 hrs | 2.0 hrs |
3.3.2 조종면 작동에 의한 6분력 계수 변화량 및 동미계수 해석
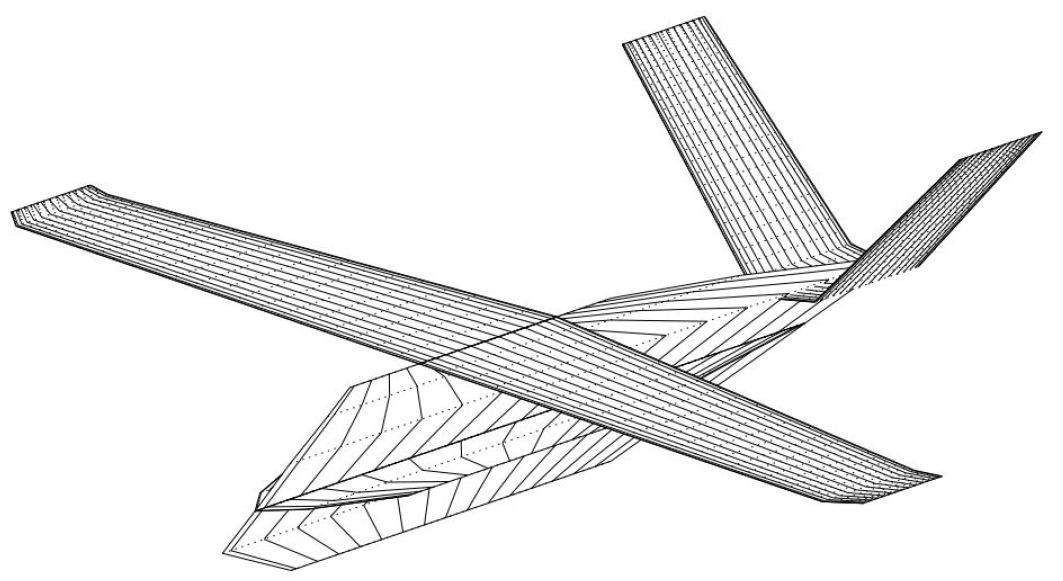
M. Drela가 개발한 VLM 기반 패널 해석 프로그램인 AVL(athena vortex lattice)[16,17]을 사용하였다. AVL은 해석 대상의 각 요소들을 두께가 없는 2차원적 패널들로 구성하여 lifting surface를 생성한다. 이 패널들은 horseshoe vortex filament로 이루어져 있으며, 후류의 경우 x축과 평행한 코드 방향의 trailing vortices로 모델링하여 해석을 수행한다. 해석에 사용한 격자는 Fig. 7과 같이 랜딩기어, 파드, 나셀을 제거한 형상을 고려하여 AVL에 내장된 격자 생성 기능을 사용하여 약 2,000개의 패널 격자로 구성하였다.
3.3.3 프로펠러 성능 해석
기본적인 BEMT의 개념은 프로펠러 축과 유입류 방향이 일치하는 조건에 대해서만 고려한다[18]. 따라서 전체 유입류 방향에 대한 성능 해석을 위해서는 기법의 확장 또는 개선이 요구되며, 기법에 대한 개선 및 검증은 이전 연구들 통해 수행되고 제시되었다[19,20,21]. 주요 개선 사항으로는 비대칭의 스트림 튜브를 가정하고 프로펠러의 3차원 유동을 고려하여 운동량 이론을 적용하였으며, 프로펠러의 6분력을 획득하기 위해 전역좌표계를 기준으로한 벡터 방식의 계산식으로 변경하여 적용하였다. 또한 기존 운동량 이론에 위배되는 특정 범위의 하강률 조건의 하강비행의 경우를 고려하여 유도속도를 피팅식과 이론식을 활용하여 단순화하였다. 마지막으로 축 방향 유도속도 비의 분모가 축 방향 유입류이므로 제자리 비행과 같이 축방향 유입류가 없는 경우 발생하는 특이점 문제를 제거하기 위해 축 방향 유도속도 비를 회전 방향 속도로 재정의 후 정식화하여 프로펠러 성능을 획득하였다.
4. 공력 DB 구축 결과 및 평가
4.1 공력 DB 구축 결과
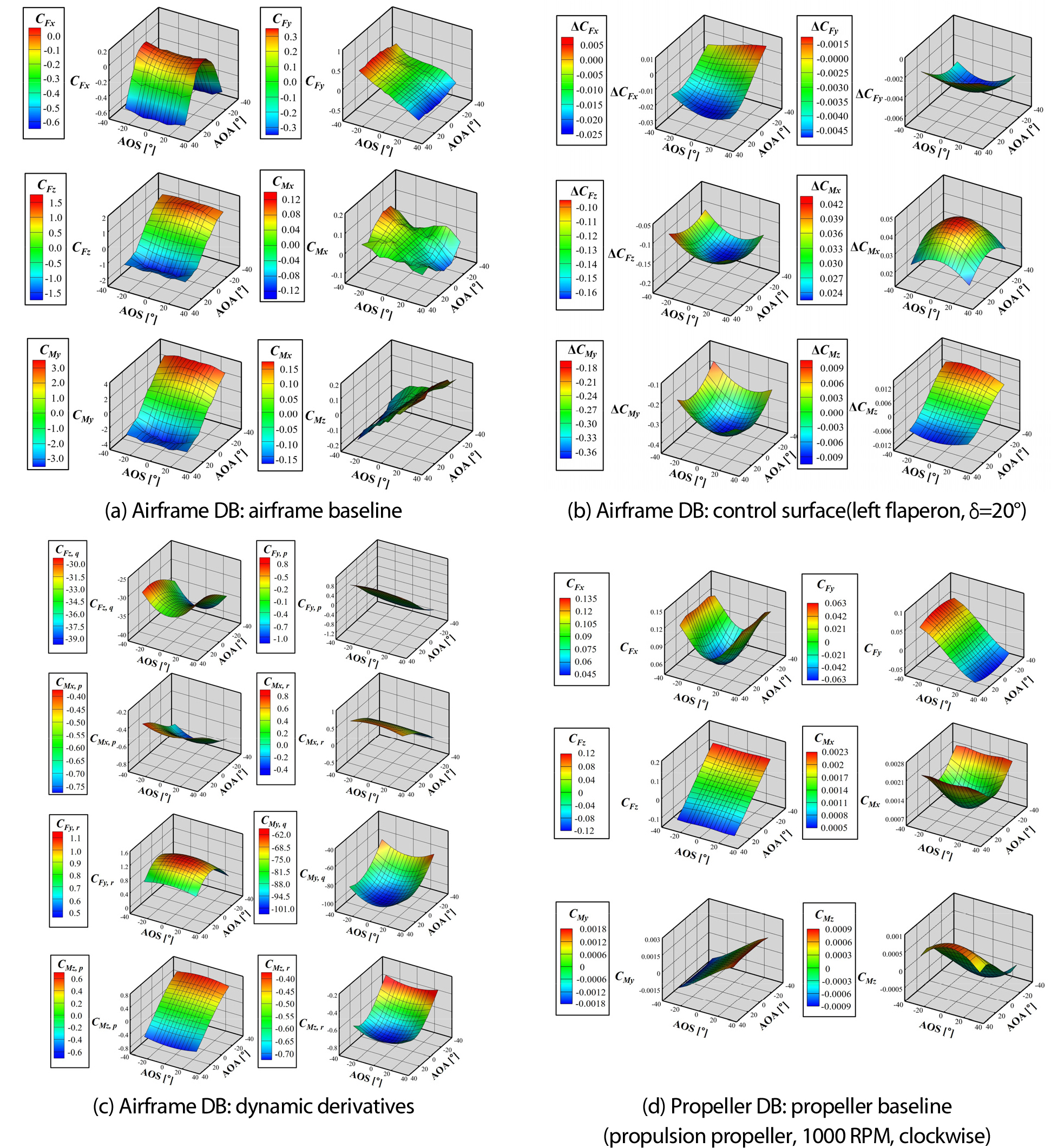
앞 절에서 소개한 공력해석 도구들을 사용하여 약 4만개의 해석점에 대해 공력 데이터를 확보하였다. 그중 RANS 기반의 CFD 해석은 640개의 해석점에 대해 수행하고, 나머지 대부분의 해석점들을 신속해석기법을 사용하여 시간 효율적으로 공력 데이터를 획득하였다. 확보한 공력 데이터는 형상의 대칭성과 상승/하강/배풍조건 등에 의해 중복되는 비행조건을 고려하여 약 10만 개의 데이터로 구성되는 전체 DB로 변환하였으며, 결과의 예로 순항속도에서의 공력 DB의 반응면을 Fig. 8에 도시하였다.
4.2 공력 DB 평가
CBM 개념을 바탕으로 구축한 공력 DB의 정확도 및 실용성을 평가하기 위해, 프로펠러가 장착된 전기체와 조종면이 작동한 기체에 대하여 CFD 해석 결과와의 비교분석을 수행하였다. 또한, 기체 동미계수의 경우 다른 공력 데이터와 비교하여 값의 크기가 작아 독립적으로 평가하였다.
4.2.1 평가용 조건
전진 비행 모드와 제자리 비행 모드에 대해 옆미끄럼각이 없는 일부 비행조건을 선정하였다. 해당 평가 조건은 Table 6와 같이 전진 비행 모드는 프로펠러만 장착된 전기체와 조종면이 작동한 기체에 대해 순항속도에서 총 5개의 받음각을 고려하였으며, 기체 동미계수는 3개의 속도에 대해 평가하였다. 제자리 비행 모드의 경우, 전기체에 대해 제자리, 수직 상승, 수직 하강 조건에서 평가를 수행하였다.
Table 6.
Flow condition for evaluation of aerodynamic DB
4.2.2 평가용 해석자
프로펠러 구동 조건에서 프로펠러 회전을 모사하기 위해 이동 참조 프레임 기법과 슬라이딩 메쉬 기법을 사용하여 압축성 유동 해석을 수행하였으며, 저속 압축성 유동에서의 효율적인 계산을 위해 저마하수 예조건화 기법을 적용하였다. 해석시간 절감을 위해 절반 형상에 대해 MRF를 적용한 정상 해석을 수행 후 이를 초기조건으로 하여 SMM을 적용한 비정상 해석을 수행하여 최종 공력 데이터를 획득하였다. 해석영역, 경계조건과 비행 모드별 격자를 Fig. 9에 나타내었다. 경계조건으로는 원방경계에 자유류 조건, 대칭면에는 대칭 경계조건을 부여하였다. 전진 비행 모드 해석은 wall function 격자(y+ ~ 80), 제자리 비행 모드 해석은 wall resolved 격자(y+ ~ 2)를 사용하였으며 각각 약 2,400만 개와 4,300만 개의 격자로 구성하였다.
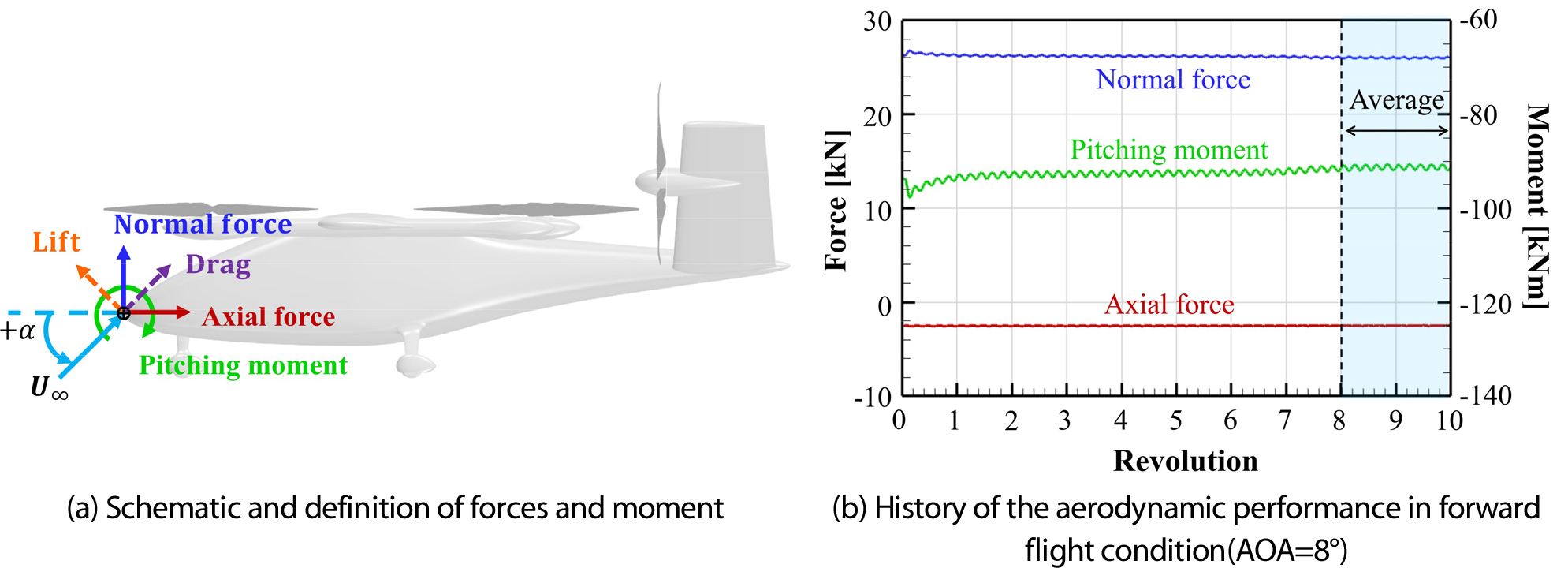
수치 기법으로는 시간과 공간에 대해 2차 정확도의 차분법을 사용하고, 난류 모델은 2방정식 모델인 k-ω SST를 적용하였다. 블레이드가 3° 회전하는 데 필요한 소요시간을 시간 간격으로 설정하고 시간 전진을 위한 내부 반복계산 횟수는 전진 비행 해석은 30회, 제자리 비행 해석은 35회로 하였다. Fig. 10(a)는 평가에 사용한 힘과 모멘트의 정의를 나타내며, 프로펠러 구동 조건에서는 전기체의 수직력, 축력, 피칭모멘트를 제시하였다. Fig. 10(b)는 전진 비행, 받음각 8° 조건에서 회전수에 따른 총 공력 성능의 시간 이력 결과의 예을 보여주며, 비행 조건에 따라 프로펠러가 10~18회 회전하는 시간 구간에 대해 해석하고, 마지막 2회전 구간에 대한 시간 평균값으로 최종 공력 데이터를 획득하였다.
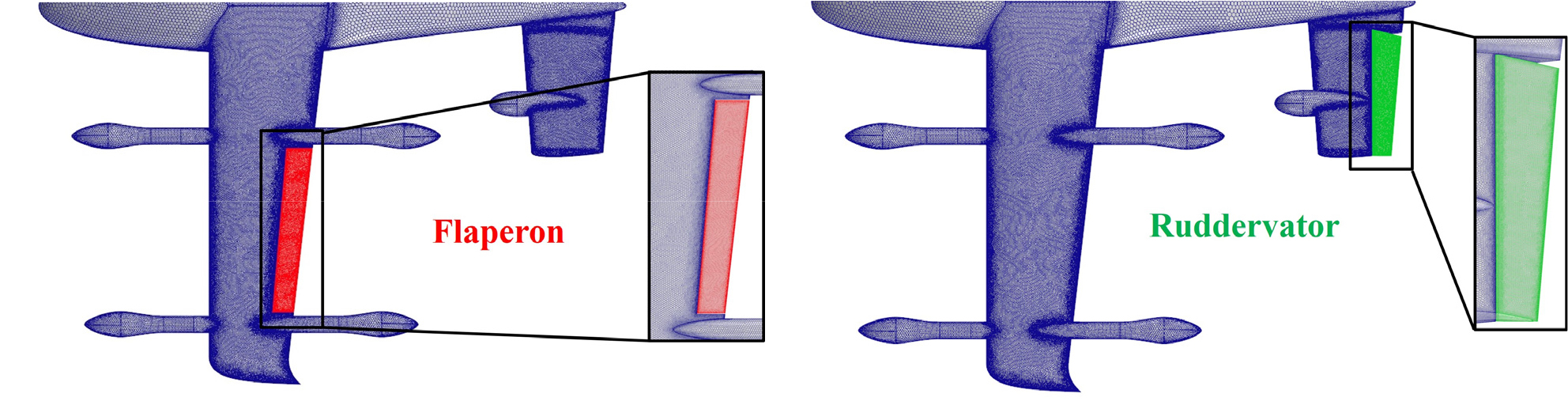
조종면 작동 조건은 정상상태, 비압축성 유동에 대한 RANS 해석을 수행하였다. 기체 6분력 계수 획득에 사용한 수치 기법 및 경계조건을 동일하게 적용하였으며, Fig. 11과 같이 해석 격자는 wall function 격자(y+ ~ 80)를 사용하고 플랩퍼론과 러더베이터 작동 형상 모두 약 1,500만개의 격자로 구성하였다. 평가 결과로는 양력, 항력, 피칭모멘트를 비교하고 제시하였다.
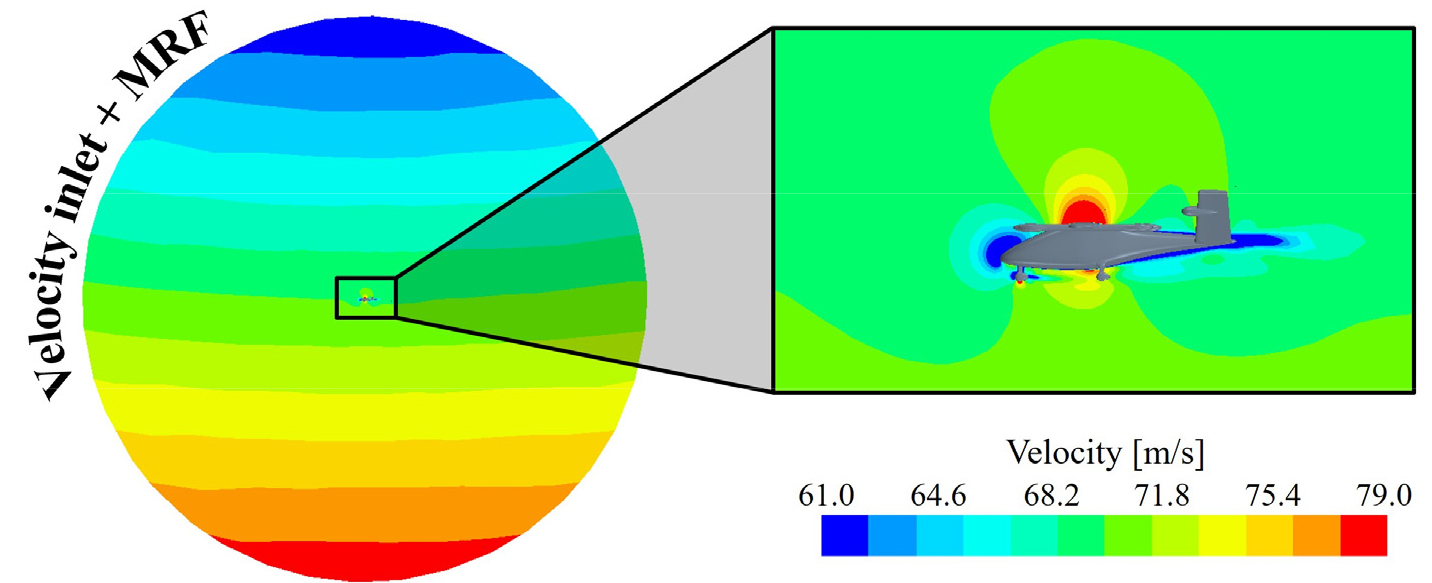
동미계수 획득을 위해 Part Ⅱ의 멀티콥터형 기체 동미계수 DB 구축에 사용된 방식인 MRF를 활용하여 정상상태, 비압축성 유동 해석을 수행하였으며, 기체 6분력 계수 획득에 사용한 수치 기법 및 해석 격자을 동일하게 적용하였다. Fig. 12는 등속 원운동에 대한 MRF 해석의 예시 결과로 LC형 기체 주위에 회전 운동하는 유동장이 적절하게 모사되었음을 확인하였으며, 평가 결과에는 안정성 좌표축 기준으로 댐핑모멘트 계수를 제시하였다.
4.2.3 전진 비행 모드
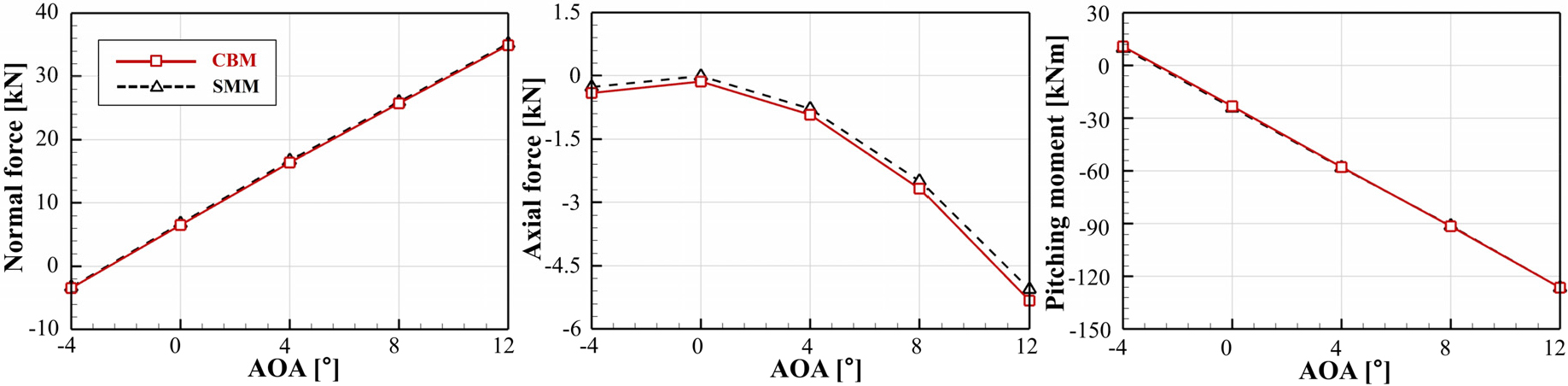
프로펠러가 장착된 절반의 전기체에 대하여, 구축한 공력 DB에 CBM을 적용하여 얻은 결과와 SMM 해석 결과를 받음각에 따라 비교하여 Fig. 13에 나타내었다. CBM의 전기체 수직력과 피칭모멘트는 SMM 해석 결과와의 값의 수준과 경향 모두 유사하며, 받음각에 따라 평균 약 3%의 차이를 보인다. 반면 축력의 경우 경향은 유사하나, CBM과 SMM 간의 일정 수준의 정량적 차이를 확인할 수 있다.
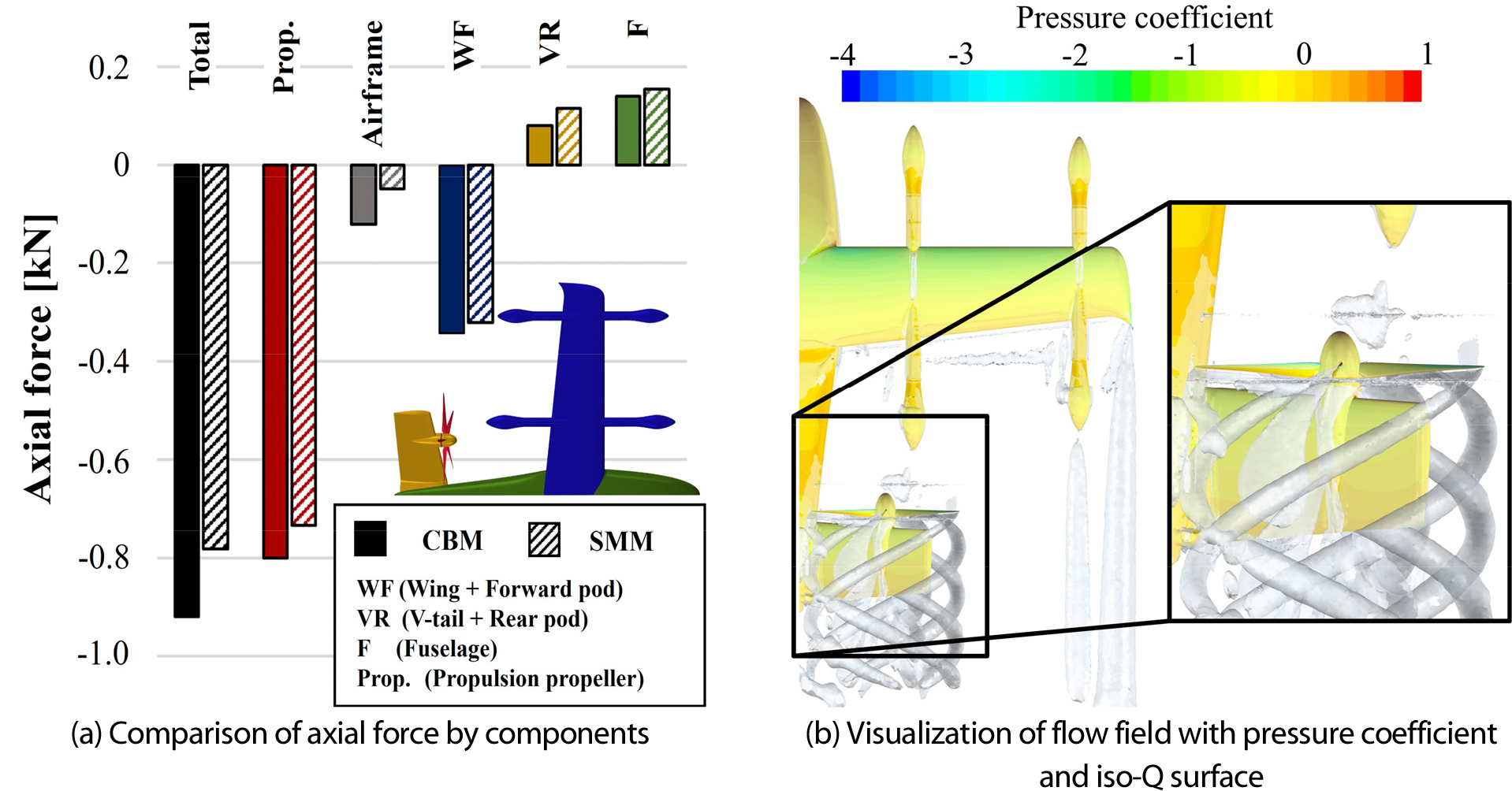
주 운용 받음각 근방으로 예상되는 4° 조건에 대해 CBM과 SMM의 전기체 축력을 기체의 구성요소들과 추진 프로펠러로 분리하여 Fig. 14(a)에 도시하였다. 기체는 날개와 전방파드(WF), V-꼬리날개와 후방파드(VR), 동체(F)로 구분하고 분류하였다. CBM과 SMM 간의 전기체 축력 차이는 약 18% 수준의 오차를 보였으며, 모든 기체의 구성요소와 추진 프로펠러에서 CBM 대비 SMM의 축력이 크게 발생함을 알 수 있다. 전체 축력 차이 중 기체와 추진 프로펠러에서 발생하는 차이가 약 50%씩 차지하고 있으며, 기체의 축력 차이 중 약 54%가 V-꼬리날개와 후방파드의 차이로 나타났다. Fig. 14(b)에는 자유류 속도로 무차원화한 표면 압력 계수와 Q-criterion을 통해 유동을 가시화하여 나타내었다. 추진 프로펠러의 후류가 V-꼬리날개와 후방파드에 직접적으로 영향을 미치며, 날개와 전방파드의 후류에 의해 프로펠러의 유입류 변화가 발생함을 알 수 있다. 따라서 본 연구에서 구축한 공력 DB에서는 프로펠러-기체 간의 공력 간섭 효과를 고려하지 않는다는 점이 CBM과 SMM 결과 간 차이의 주요 요인으로 판단할 수 있다.
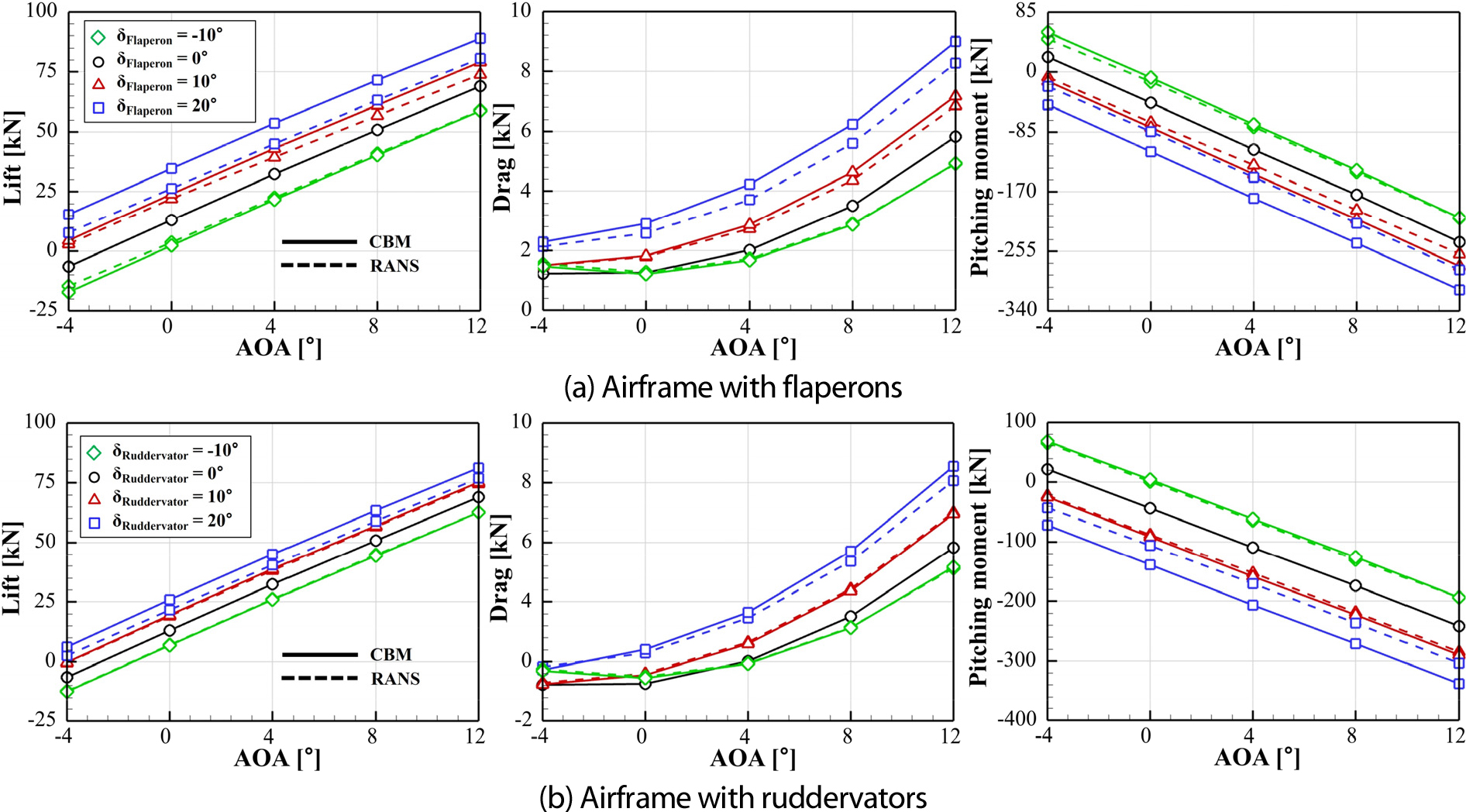
조종면이 작동한 기체에 대해 CBM을 적용하여 얻은 공력 결과와 RANS 해석 결과를 받음각에 따라 비교하여 Fig. 15에 도시하였다. 플랩퍼론 변위각 –10° 조건과 러더베이터 변위각 ±10° 조건에서 CBM의 양력, 항력, 피칭모멘트가 RANS 결과와 수준과 경향이 잘 일치하고 있으며, 플랩퍼론 변위각 10°에서는 일정 수준의 양력과 피칭모멘트의 차이가 발생함을 확인하였다. 항력의 경우 받음각이 증가함에 따라 차이가 커지며 받음각 12도에서 약 8% 수준의 오차를 확인하였다. 두 조종면 모두 변위각 20° 조건에서 는CBM과 RANS 결과 간 비교적 큰 정량적 차이를 보이며, 동일 받음각에서 변위각이 증가함에 따라 차이가 증가함을 알 수 있다. 이는 구축한 공력 DB의 조종면 작동 해석에 사용한 비점성 해석자인 AVL이 RANS 해석 시 발생하는 조종면에서의 국부적인 유동박리가 변위각이 증가함에 따라 심화되는 경향을 고려하지 못하여 발생한 결과로 판단된다.
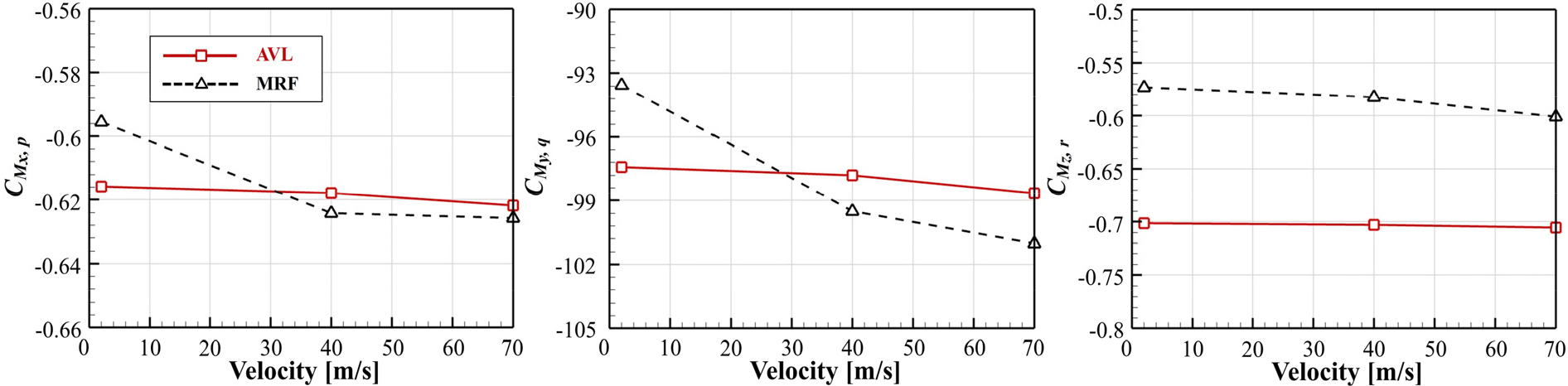
주요 동미계수로 분류되는 댐핑모멘트 계수인 CMx,p, CMy,q, CMz,r을 속도에 따라 비교하여 Fig. 16에 도시하였다. 모든 속도영역에서 AVL과 MRF 해석 결과 간의 부호가 일치하고 속도에 따라 증가 혹은 감소하는 경향을 확인하였다. AVL로 계산한 DB 결과는 MRF 결과 대비 CMx,p와 CMy,q는 최대 4% 이내로 유사한 수준을 보이며, CMz,r은 최소 17%에서 최대 22%의 비교적 큰 차이를 보이지만 값 자체가 미소한 값임을 확인하였다.
종합적으로는 구축한 공력 DB를 CBM에 적용하여 획득한 전기체 수직력과 피칭모멘트는 SMM 해석 결과와 비교하여 수준과 경향이 잘 일치하고 있으며, 축력의 경우 일정 수준의 정량적 차이는 보이나 마찬가지로 수준과 경향이 모두 유사함을 확인하였다. 또한, 조종면 작동 조건에 대한 결과 비교를 통해 상대적으로 유동 박리가 크게 발생하지 않는 작은 변위각에서는 DB가 합리적인 수준의 결과를 예측하였다. 다만, 큰 조종면 변위각에서는 RANS 해석 결과와 비교적 큰 차이를 보이나, 순항 시 조종면 변위각은 –10°~10° 범위에서 크게 벗어나지 않을 것으로 예상된다. 동미계수의 경우 MRF 해석 결과와의 비교를 통해 AVL을 사용하여 구축한 DB가 신뢰할 만한 수준임을 확인하였다. 따라서, 공력 DB가 시뮬레이터 탑재를 위한 활용성을 확보하고 있으며, CFD 해석 결과와의 데이터 퓨전을 통해 AVL 기반의 조종면 및 동미계수 DB의 정확도를 개선함으로써 DB의 정확도 향상과 고도화 가능성을 식별하였다.
4.2.4 제자리 비행 모드
제자리 비행 모드의 해석 결과들을 기체 구성요소별 수직력을 비교하여 Fig. 17(a)에 나타내었다. 제자리 비행 조건에서는 비행 속도(자유류 속도)가 없으므로 CBM으로부터 획득되는 기체 수직력은 0이며, 수직 상승 및 하강 조건에서는 낮은 동압으로 인해 미소한 값을 보인다. 반면 SMM 해석 결과는 CBM 대비 큰 하방 수직력(다운포스)이 기체에 발생함을 확인하였다. Fig. 17(b)에 프로펠러 블레이드 끝단 속도로 무차원화한 표면 압력 계수와 Q-criterion을 사용하여 유동을 가시화하여 나타내었다. 리프트 프로펠러 구동에 의해 유도되는 유입류가 아래 방향으로 유동을 발생시킴에 따라 기체 윗면의 압력이 증가하고 특히, 리프트 프로펠러 후류에 의해 전방파드 및 날개 윗면에 고압의 영역이 형성되어 발생한 결과로 분석된다.
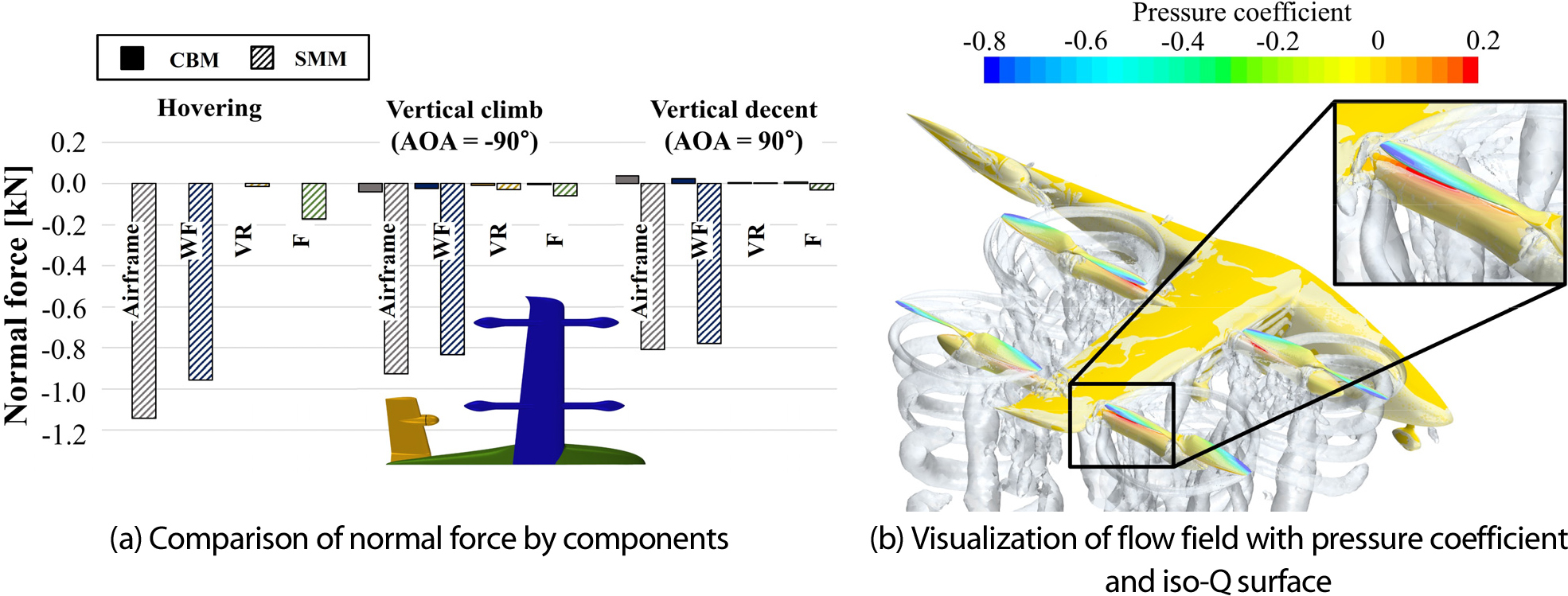
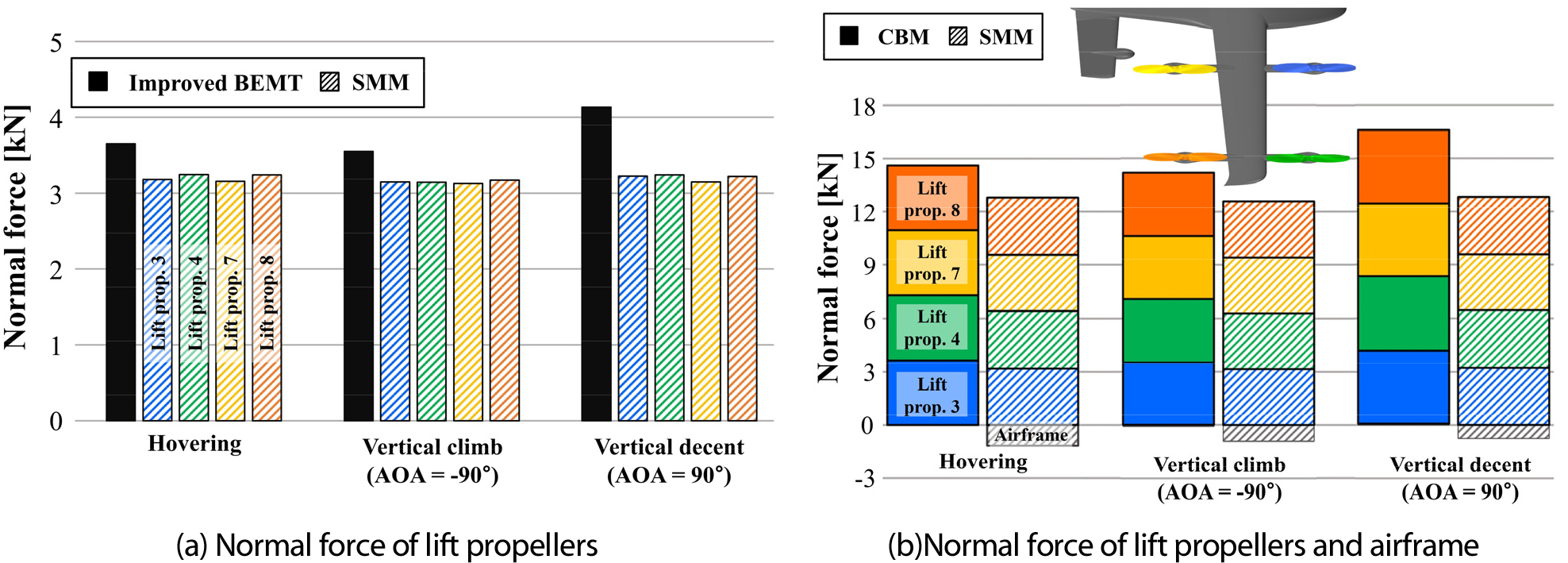
프로펠러 6분력 DB 구축에 사용한 improved BEMT와 SMM의 해석 결과인 리프트 프로펠러의 수직력을 프로펠러 별로 비교하여 Fig. 18(a)에 도시하였으며, 각 평가 조건에서 improved BEMT로 해석한 프로펠러의 수직력은 네 프로펠러가 모두 동일한 값을 갖는다. 모든 평가 조건에서 SMM 해석 결과의 프로펠러 간의 수직력은 2% 미만의 차이를 보인다. 제자리 및 수직 상승 비행조건에서 두 해석 방법으로 획득한 프로펠러의 수직력은 최소 13%, 최대 16% 수준의 오차를 보이며, 수직 하강 조건에서는 최소 27%, 최대 31%의 큰 차이가 확인되었다. 이는 축방향 유입류가 음수가 되는 하강 비행조건과 같이 BEMT의 근거가 되는 운동량 이론에 위배될 경우 improved BEMT는 유도속도를 피팅식을 활용하여 계산되도록 하였으나, 정확도 측면에서는 일정 수준의 오차를 포함하고 있어 SMM과의 차이가 증가하는 것으로 판단된다. Fig. 18(b)와 같이 공력 DB를 CBM에 적용하여 획득한 수직력은 앞서 식별한 기체에 작용하는 다운포스와 리프트 프로펠러들의 추력 차이가 중첩되어 Full CFD 대비 정지 비행의 경우 25%, 수직 상승은 21%, 수직 하강은 38%의 차이가 발생함을 확인할 수 있다.
종합적으로는 앞선 전진 비행 모드에 대한 평가 결과와 비교하여 제자리 비행 모드에서는 다수의 프로펠러들과 기체 간의 공력 간섭 효과가 크게 증가하여 기체에 하방 수직력(다운포스)이 발생하고, DB 구축에 사용한 프로펠러 성능 해석자의 충실도로 인한 각 리프트 프로펠러의 추력 차이가 중첩되어 CBM과 SMM 간 수직력의 차이가 비교적 크게 발생하였다. 그러나 Table 7에 나타낸 데이터 획득에 사용된 소요 자원 및 시간을 고려한다면 시뮬레이터 개발 초기 단계에서 넓은 DB 구축 범위에 대응하여 해석 소요 자원 대비 비교적 합리적인 힘의 방향과 경향성 가지는 결과를 획득 가능하다고 판단된다. 또한, 프로펠러 해석에 높은 충실도의 해석 기법을 적용하고, 프로펠러-기체 간의 공력 간섭을 추가적인 DB 요소로 고려함으로써 정확도의 개선과 고도화의 가능성을 식별하였다.
5. 결 론
본 연구에서는 리프트-크루즈형 비행체의 비행 시뮬레이터 탑재용 공력 DB를 구축하고 평가하였다. 시간 효율적으로 공력 DB를 구축하기 위해 성분합성법(CBM) 개념을 적용하고 제자리 및 전진 비행 모드로 유형을 분리하여 구성하였다. 공력 DB의 구조는 기체 DB와 프로펠러 DB로 분리하였으며, 공력 DB의 구성으로써 기체의 6분력 계수, 조종면 작동에 의한 6분력 계수 변화량, 동미계수, 프로펠러 6분력 계수로 구성하였다. 기체 6분력 계수 획득에는 RANS 기반의 CFD 해석을 적용하였으며, 나머지 공력 데이터 획득에는 신속해석 기법인 AVL과 BEMT를 활용하였다. 또한, CBM에 기반한 공력 DB의 정확도 및 실용성을 평가하기 위해 특정 비행조건에 대해 슬라이딩 메쉬 기법(SMM)과 이동 참조 프레임 기법(MRF)을 사용한 RANS 기반의 CFD 해석을 수행하여 비교 분석하였다.
전진 비행 모드 평가에서는 기체-프로펠러 간섭 효과로 인해 전기체의 축력에서 CBM과 SMM 결과 간 일정 수준의 정량적 차이는 확인되나 수준과 경향이 유사하고, 그 외의 공력에서는 수준과 경향이 모두 잘 일치함을 확인하였다. 또한, 구축한 DB의 조종면 작동 해석에 사용한 비점성 해석자인 AVL의 한계로 인해 큰 조종면 변위각에서 RANS 해석 결과와의 차이가 증가하였으나, 순항 시 예상되는 변위각 작동 범위 내에서는 DB가 합리적인 수준의 결과를 예측하였다. 동미계수의 경우 CMz,r가 AVL과 MRF 간 최대 22%의 차이를 보이나, 값 자체가 미소하고 그 외의 댐핑 모멘트 계수에서는 차이가 최대 4% 미만으로 AVL을 사용하여 구축한 DB가 신뢰할 만한 수준임을 확인하였다. 제자리 비행 모드 평가에서는 전진 비행의 경우와는 달리 다수의 프로펠러 구동에 의한 공력 간섭 효과가 증가하여 기체에 하방 수직력이 발생하고 프로펠러 성능 해석자의 충실도로 인한 추력 차이가 중첩되어 CBM과 SMM 해석 결과 간 전기체 수직력 차이가 비교적 크게 발생하였다. 다만, 넓은 DB 구축 범위에 대응하여 데이터 획득에 사용된 소요 자원 및 시간을 고려한다면 합리적인 결과를 획득 가능하다고 판단되었다. 종합적으로, CBM 개념을 적용하여 구축한 공력 DB로부터 다양한 비행조건들에 대한 공력 변화를 적절하게 예측할 수 있으며, 개발 초기의 비행 시뮬레이터에서의 활용이 충분히 가능하다고 판단하였다. 또한, 평가를 통한 DB 검토로부터 프로펠러-기체 간의 공력 간섭을 추가적인 DB 요소로 고려하고 프로펠러 6분력 계수, 조종면 작동에 의한 6분력 계수 변화량, 동미계수 DB에 높은 충실도의 해석 기법을 적용하여 개선함으로써 정확도 향상과 고도화 가능성을 식별하였다. 향후 보다 향상된 DB 구축을 위해 본 연구진이 보유한 프로펠러 성능 해석자인 actuator disk method 기반의 CFD 코드를 사용하여 단독 프로펠러 및 전기체 해석을 수행할 계획이다[22,23,24]. 이를 통해 공력 간섭에 의한 전기체의 공력 성능 변화에 대해 보정인자를 도출하여 공력 간섭 효과를 DB 요소로 추가하고 프로펠러 6분력 계수 DB의 정확도를 개선하고자 한다. 또한, 구축한 조종면 작동에 의한 6분력 계수 변화량 및 동미계수 데이터를 활용하여 RANS 기반의 CFD 해석 결과와의 데이터 퓨전을 통해 DB를 고도화할 것이다.
