

1. 서 론
2. 수치 기법 및 격자
2.1 수치 기법
2.2 해석 모델 및 격자
3. 트림 연계 해석
3.1 CFD-Trim 연계 해석 기법
3.2 트림 결과
4. 공력 해석 결과
4.1 코드 검증
4.2 허브 영향 분석
5. 결 론
1. 서 론
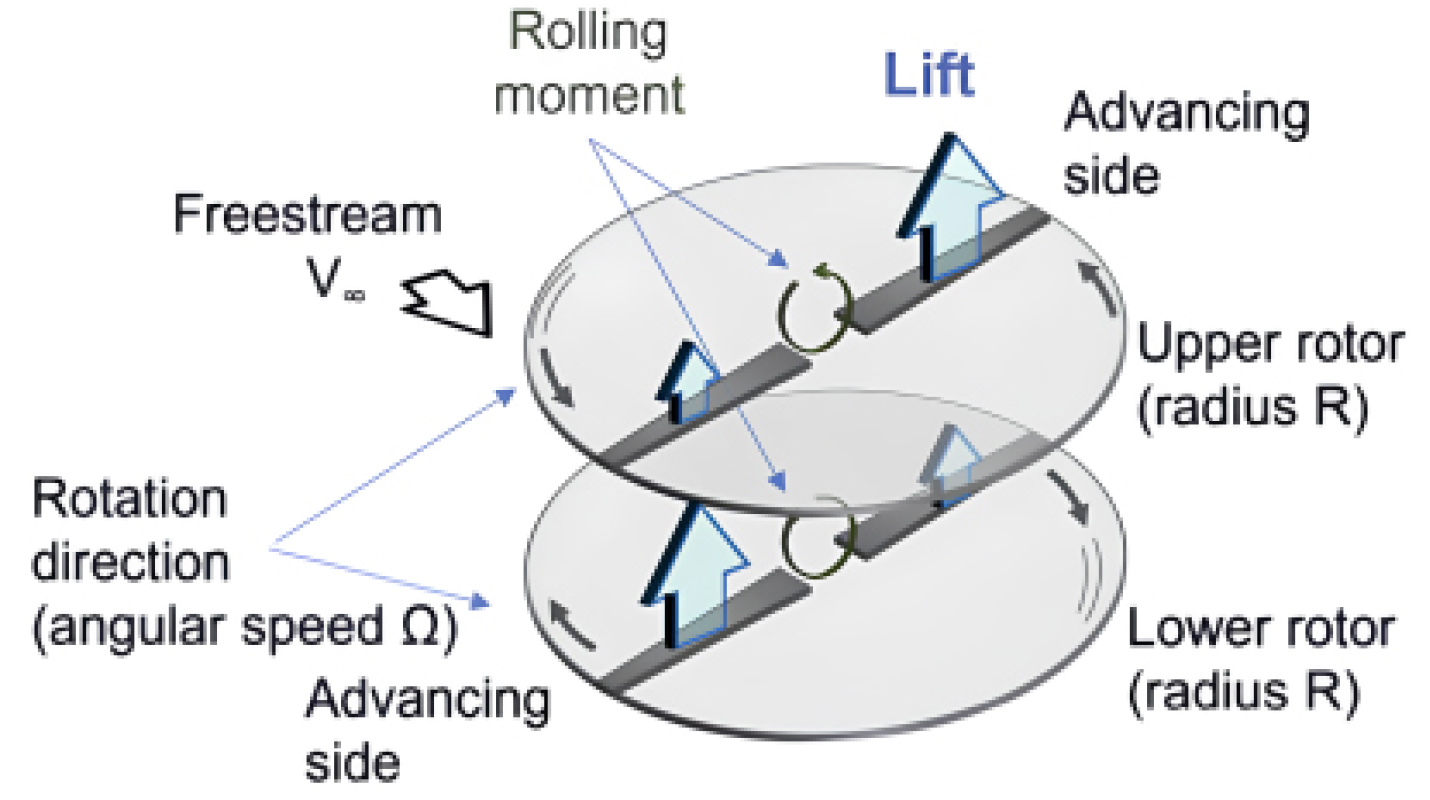
최근 고속 비행이 가능하면서도 기동성이 우수한 차세대 헬리콥터 연구가 활발히 진행되고 있다[1,2,3]. 특히 동축반전 로터는 두 개의 로터가 서로 반대 방향으로 회전하는 시스템으로, 상부 로터와 하부 로터로 구분된다. 이 로터 시스템은 꼬리 로터(Tail rotor)가 필요하지 않아 에너지 손실을 줄일 수 있다. 또한, 동일한 로터 지름을 가질 때 추력을 더 많이 낼 수 있고[4], ABC(Advancing Blade Concept)를 통해 고속 비행을 할 수 있다 [5,6,7,8]. ABC는 상부 로터와 하부 로터가 롤링 모멘트에 대한 추력 중심을 서로 반대 방향으로 이동시키는 리프트 오프셋을 적용한 것이다. 따라서 각 로터의 전진 면과 후퇴 면 간에 양력을 균형화할 필요가 없으므로, 각 로터의 후퇴 면에서 높은 블레이드 받음각으로 인한 실속(Stall)을 방지할 수 있다. 이러한 기술은 1960년대 Sikorsky사에서 처음 제안되었으며, Rudell 등[5,6]이 XH-59A에 관한 기술 보고서를 공개하였다. 리프트 오프셋을 식으로 나타내면 식 (1)과 같으며, 리프트 오프셋 동축반전 로터의 시스템을 Fig. 1에 나타내었다.
여기서 위첨자 U는 상부 로터를, L은 하부 로터를 의미하며, 는 추력 계수이고 은 롤링 모멘트를 의미하고, R은 로터 반지름을 의미하고, 는 롤링 모멘트의 균형 위치를 의미한다.
전진 비행하는 로터에 대한 CFD(Computational Fluid Dynamics) 해석에서 트림 절차는 필수적이다[10]. Hideaki 등[11]은 동축반전 로터에 대해 트림 상태에서 CFD 해석을 수행하기 위해 BET(Blade Element Theory)를 기반으로 분석을 진행하였으며, Jia 등[12,13,14]은 XH-59A 동축반전 로터를 대상으로 CFD/CSD 연계 해석을 수행하여 트림 상태에서 공력, 소음 특성을 분석하였고, Klimchenko 등[15]은 X2TD 모델을 대상으로 CFD/CSD 연계 해석을 수행하여 트림 상태에서 공력 특성을 분석하였다.
동축반전 로터의 해석에서는 상 하부 로터 간의 공기역학적 상호 작용뿐만 아니라, 전진 비행 시 상부 로터와 하부 로터 사이에 있는 허브에서 발생하는 와류(Vortex)를 고려해야 한다. 특히 허브에서 생성된 와류는 방위각 0도 근처에서 로터 블레이드에 영향을 미칠 가능성이 있다.
따라서 본 논문에서는 트림 상태에서 리프트 오프셋 동축반전 로터의 허브 효과를 분석하였다. 이를 위해 리프트 오프셋 비행 상태로 트림하였으며, 트림하기 위해 회전익기 통합 해석 코드인 CAMRAD II와 트림 연계 해석을 수행하였다. 이와 같은 트림 연계 해석 방법은 CFD만을 이용해 트림 절차를 수행하는 것에 비해 계산 비용 측면에서 매우 효율적이다[16]. CFD 해석에는 RANS(Reynolds Averaged Navier-Stokes)방정식을 기반으로 한 코드인 KFLOW[17]를 사용하였으며, KFLOW는 키메라(chimera) 중첩 격자 기법을 사용하여 로터 해석을 수행할 수 있다.
2. 수치 기법 및 격자
2.1 수치 기법
3차원 압축성 Navier-Stokes 방정식을 기반으로 하여 리프트 오프셋 동축반전 로터의 허브 효과 분석을 진행하였다. 식 (2)는 보존형으로 3차원 압축성 Navier-Stokes 방정식을 표현한 식이다.
여기서 q는 유동 변수이며 는 각 방향으로의 비점성 유속벡터이고, 는 점성 유속벡터이다. 식 (2)를 유한체적법(Finite Volume method)을 사용하여 공간에 대해 이산화하였고, 비점성 유속벡터에 대해 Roe’s FDS scheme[18]을 사용하였다. 또한, 정확한 와류 포착을 위해 5차 정확도인 WENO(Weighted Essentially Non-Oscillatory) 기법[19]을 사용하였으며, Wilcox Durnin + 난류 모델을 사용하였다[20]. 시간 전진 기법으로는 DADI(Diagonalized Alternate Directional Implicit Method) 기법[21]을 사용하였다.
2.2 해석 모델 및 격자
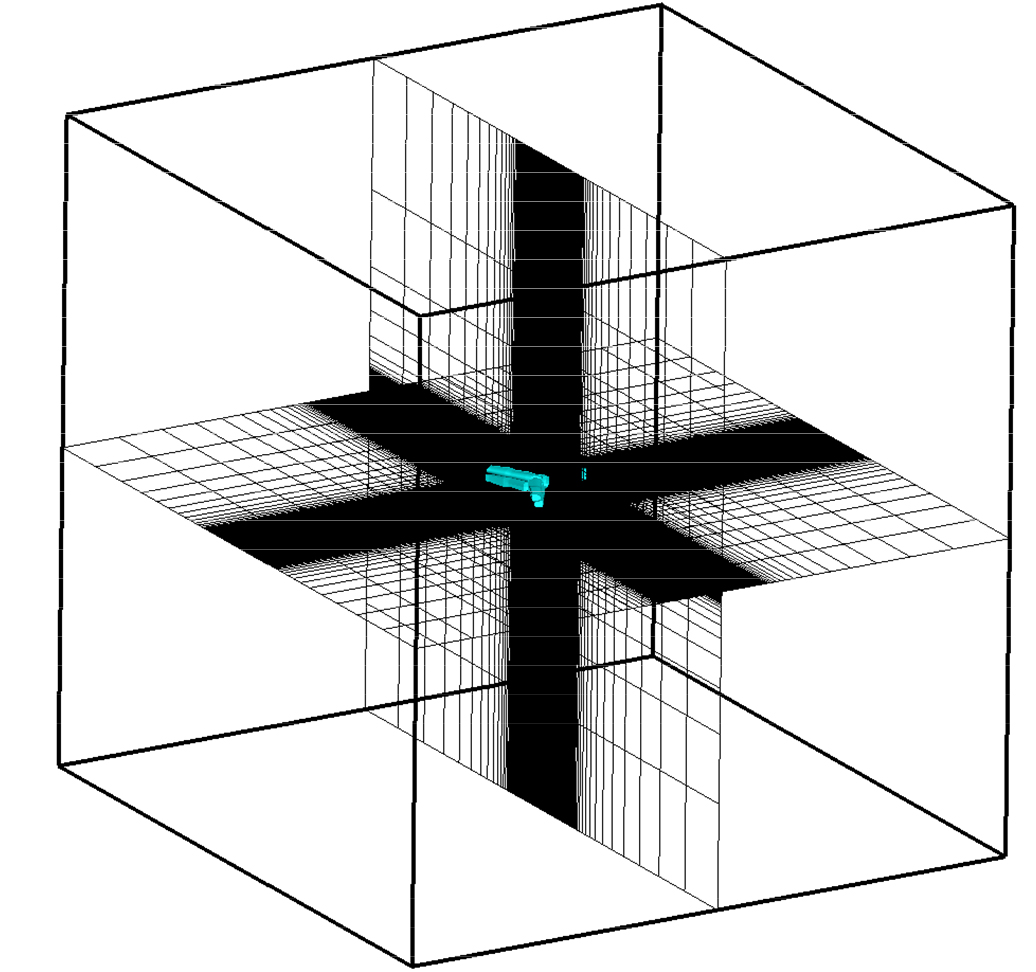
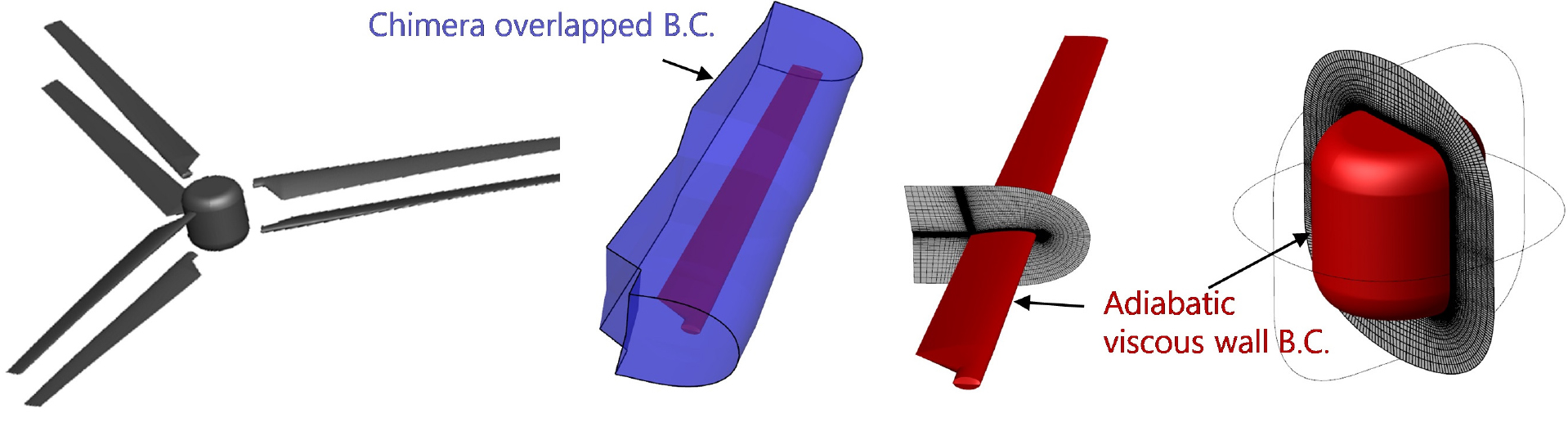
본 논문에서는 리프트 오프셋 동축반전 로터에 대해 해석하기 위해 XH-59A의 로터 모델을 사용하였다. XH-59A는 각 로터마다 블레이드가 3개이며, 로터에 사용된 익형 데이터를 사용할 수 없으므로 Hong 등[22,23]이 실제 익형의 두께 분포와 일치하도록 설계한 형상을 사용하였다. 시위 길이 및 비트림각 분포, 익형 및 두께 분포를 Fig. 2에 나타내었고, XH-59A 동축반전 로터의 자세한 형상 정보를 Table 1에 나타내었다. 또한, 블레이드 root-cut-out을 스팬의 12%까지 늘려 블레이드 루트에서 발생하는 와류를 최소화하고자 하였다. 해석에 사용한 배경 격자를 Fig. 3에 나타내었고, 로터 주위의 격자는 블레이드 스팬 방향 75% 지점 시위 길이의 15% 크기의 등간격을 갖도록 설정하였으며, Riemann invariant 조건을 원방 경계 조건으로 사용하였다. 배경 격자의 크기는 시위 길이의 200배 크기를 갖는 정육면체이며, 격자 개수는 회전축 방향으로 90개, 가로, 세로 방향으로 264개로 설정하였다. 블레이드 부격자(subgrid)와 허브 격자 및 경계 조건을 Fig. 4에 나타내었다. 무차원 거리 가 1에 가깝도록 벽면 위 첫 번째 격자를 설정하였고, C-H 유형이며 각 스팬 방향마다 시위 길이의 1.2배만큼의 크기를 갖도록 하였으며, 각 블레이드 격자는 시위 방향으로 280개, 스팬 방향으로 122개, 회전축 방향으로 72개로 설정하였다.
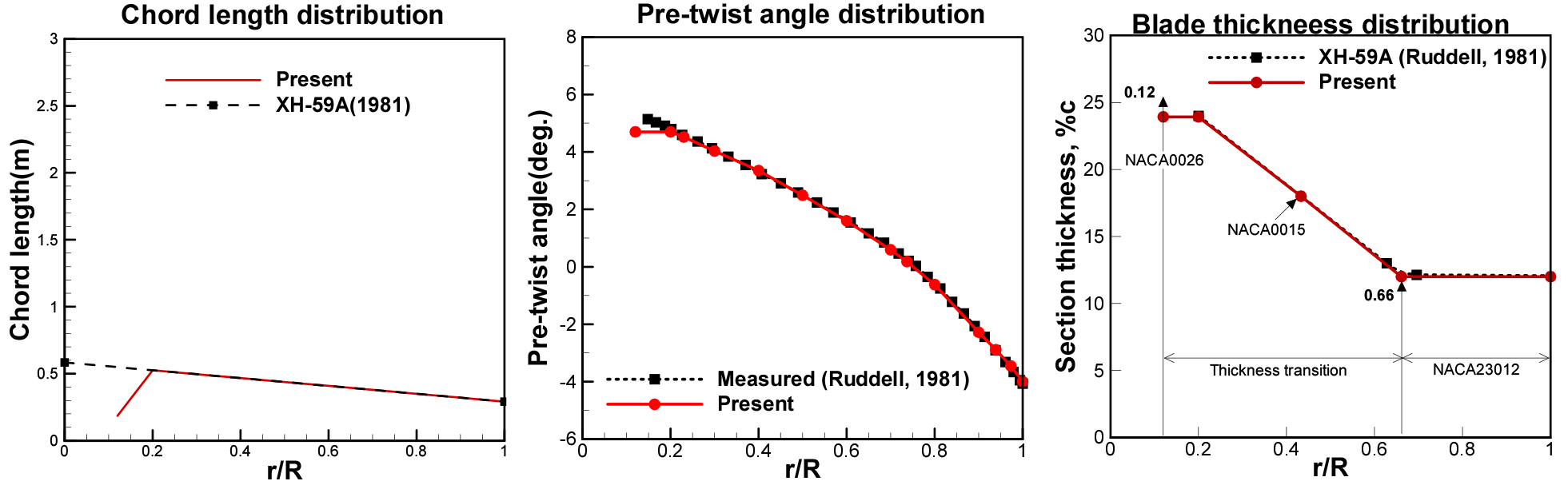
Table 1.
Specification of the XH-59A coaxial rotor
3. 트림 연계 해석
3.1 CFD-Trim 연계 해석 기법
전진 비행하는 리프트 오프셋 동축반전 로터를 CFD 코드 내에서 트림하려면, 식 (3)의 트림값을 얻기 위해 각 트림 변수에 섭동(perturbation)을 적용하여 한 회전 동안 변화하는 트림 평균값을 계산해야 한다. 여기서 는 각 로터의 블레이드 개수를 의미하고, L.O.는 리프트 오프셋을 의미하며, 는 토크 차이를 의미한다. 트림 방정식을 계산하기 위해 6개의 트림 변수에 각각 섭동을 적용해야 하므로 6/만큼의 계산량이 필요하며, 유동장의 충분한 수렴을 위해 추가적으로 1회전의 계산이 더 필요하다. 따라서 트림을 한번 수행할 때 6/+1 회전의 계산량이 요구된다.
반면, CFD와 CAMRAD II의 공력 하중의 차이를 반복적으로 CAMRAD II에 전달하여 트림값을 수렴시키는 방식인 CFD-Trim 연계 해석은 트림 1회당 1회전의 계산량이 요구된다. 본 연구에서는 통합해석 코드인 CAMRAD II를 이용할 때, 블레이드는 강체로 가정하여 트림 코드로만 이용하였다. Fig. 5에 트림 연계 해석 방법을 나타내었다.
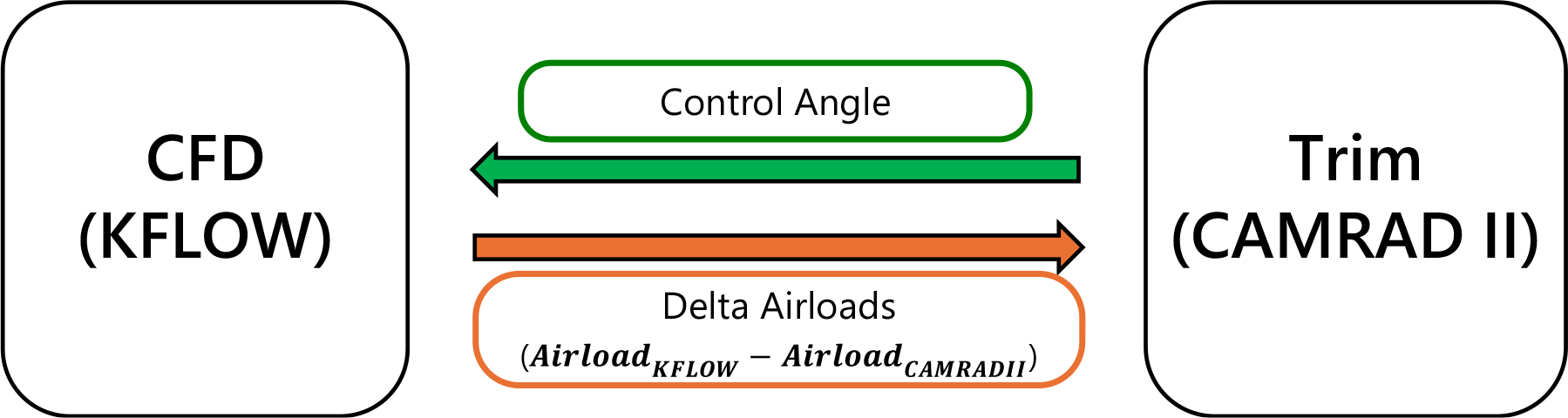
초기 트림값은 KFLOW를 이용해 로터 익형의 C81 테이블을 생성한 후, CAMRAD II의 rolled-up wake 기법을 적용하여 계산하였다. 이렇게 계산된 트림값을 이용해 CFD 해석을 수행하였으며, 이후 CFD 해석을 통해 얻은 단면 공력 하중과 CAMRAD II에서 계산된 단면 공력 하중 간의 차이를 CAMRAD II로 넘겨주어, 해당 차이가 0에 가까워질 때까지 반복적으로 계산을 진행하였다. 즉, CAMRAD II의 내부 공력 모델을 CFD에서 계산된 공력으로 대체하는 방식으로 트림을 수행한 것이다. KFLOW에서 CAMRAD II로 전달되는 단면 공력 하중은 식 (4)부터 식 (7)까지를 이용해 계산된다.
여기서, 는 시위 길이에 수직한 힘을 나타내며, 은 CFD 정렬 격자의 셀에서 블레이드 스팬 방향으로의 폭을 의미한다. 또한, 은 제자리 비행 시 블레이드 끝단에서의 마하수를 뜻하며, 는 25% 시위점에서의 피칭 모멘트를 나타낸다. 또한 은 블레이드 시위 방향으로의 특정 위치에서 시위선의 길이이며, 은 제자리 비행 시 블레이드 끝단 속도를, 은 자유류 밀도를 각각 의미한다. XH-59A의 동축반전 로터는 블레이드 개수가 3개이므로 CFD 코드 내에서 트림하면 트림 1회당 3회전의 계산량이 요구되고, CFD-Trim 연계 해석 기법을 이용하면 트림 1회당 1회전의 계산량이 요구되므로 CFD-Trim 연계 해석 방법이 CFD 코드 내에서 트림하는 것보다 매우 효율적이다.
3.2 트림 결과
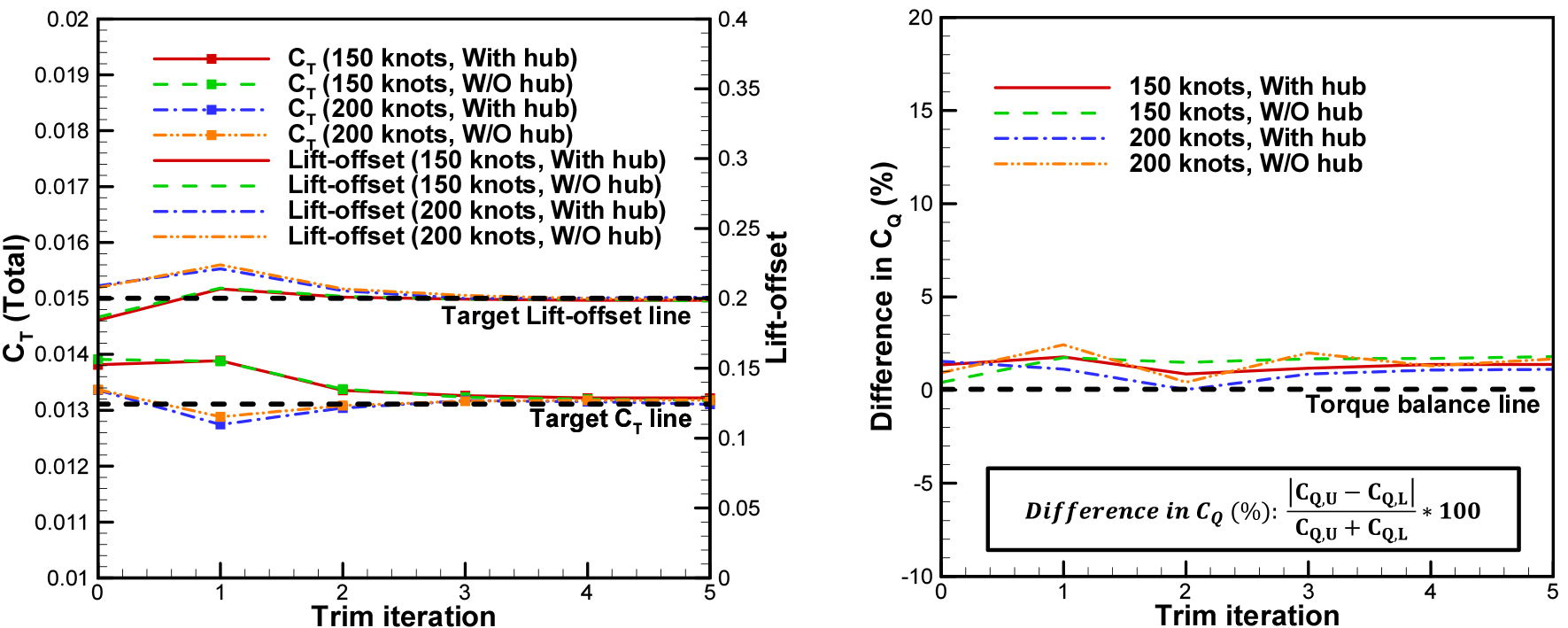
XH-59A 동축반전 로터 모델에 대한 목표 트림 값과 해석 조건을 Table 2에 정리하였다. 허브 효과 분석을 위해 전진 속도 150노트(knots) 및 200노트에서 CFD-Trim 연계 해석을 수행하였으며, 두 속도 모두 Table 1에서 제시한 338 RPM의 회전 속도로 해석을 진행하였다. Fig. 6은 트림 반복 횟수에 따른 추력 계수, 리프트 오프셋, 토크 차(Torque difference) 변화를 나타낸 그림이다. 허브를 고려한 경우와 고려하지 않은 경우, 모든 해석 조건에서 5회의 트림 반복 후 공력 하중의 차이가 더 이상 변화하지 않아 수렴하였다. 최종적으로 수렴되었을 때, 토크 차는 최대 2% 이내의 오차를 보였으며, 리프트 오프셋과 추력 계수는 1% 미만으로 매우 낮은 수준의 오차를 보였다. 이러한 작은 오차는 시간 간격이 매우 조밀한 KFLOW의 공력 하중을 CAMRAD II의 시간 간격에 맞게 보간하는 과정에서 발생할 수 있는 오차이다. 따라서, 리프트 오프셋을 고려한 고속 비행하는 동축반전 로터에 대해 CFD-Trim 연계 해석을 하였을 때, 트림 정확도를 충분히 확보하면서 계산 비용을 절감할 수 있음을 확인하였다.
4. 공력 해석 결과
4.1 코드 검증
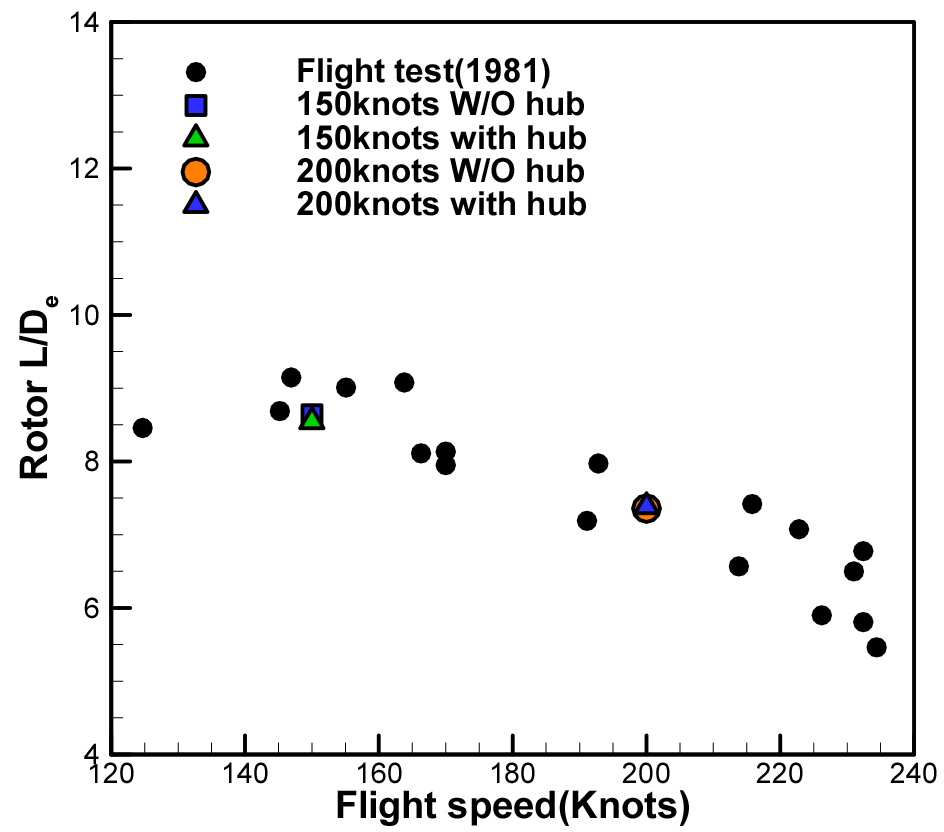
고속 비행하는 리프트 오프셋 동축반전 로터에 대해 코드 검증을 위해 트림된 상태의 CFD 해석 결과를 비행 시험 결과와 비교한 그림을 Fig. 7에 나타내었다. CFD 해석 결과와 비행 시험 결과가 경향성이 일치함을 확인하였다.
4.2 허브 영향 분석
고속 비행하는 리프트 오프셋 동축반전 로터에서 로터 허브가 미치는 영향을 분석하기 위해, 150노트와 200노트의 전진 속도에서 허브를 포함한 경우와 포함하지 않았을 때 트림 상태에서의 CFD 해석 결과를 분석하였다. 해석 결과의 와류 구조(Vortex structure)를 Fig. 8에 나타냈다. 좌측 그림은 허브를 포함했을 때의 와류 구조이고, 우측 그림은 허브를 고려하지 않았을 때의 와류 구조이다. 상단의 두 그림은 150 노트일 때, 하단의 두 그림은 200노트일 때의 결과를 나타낸다.
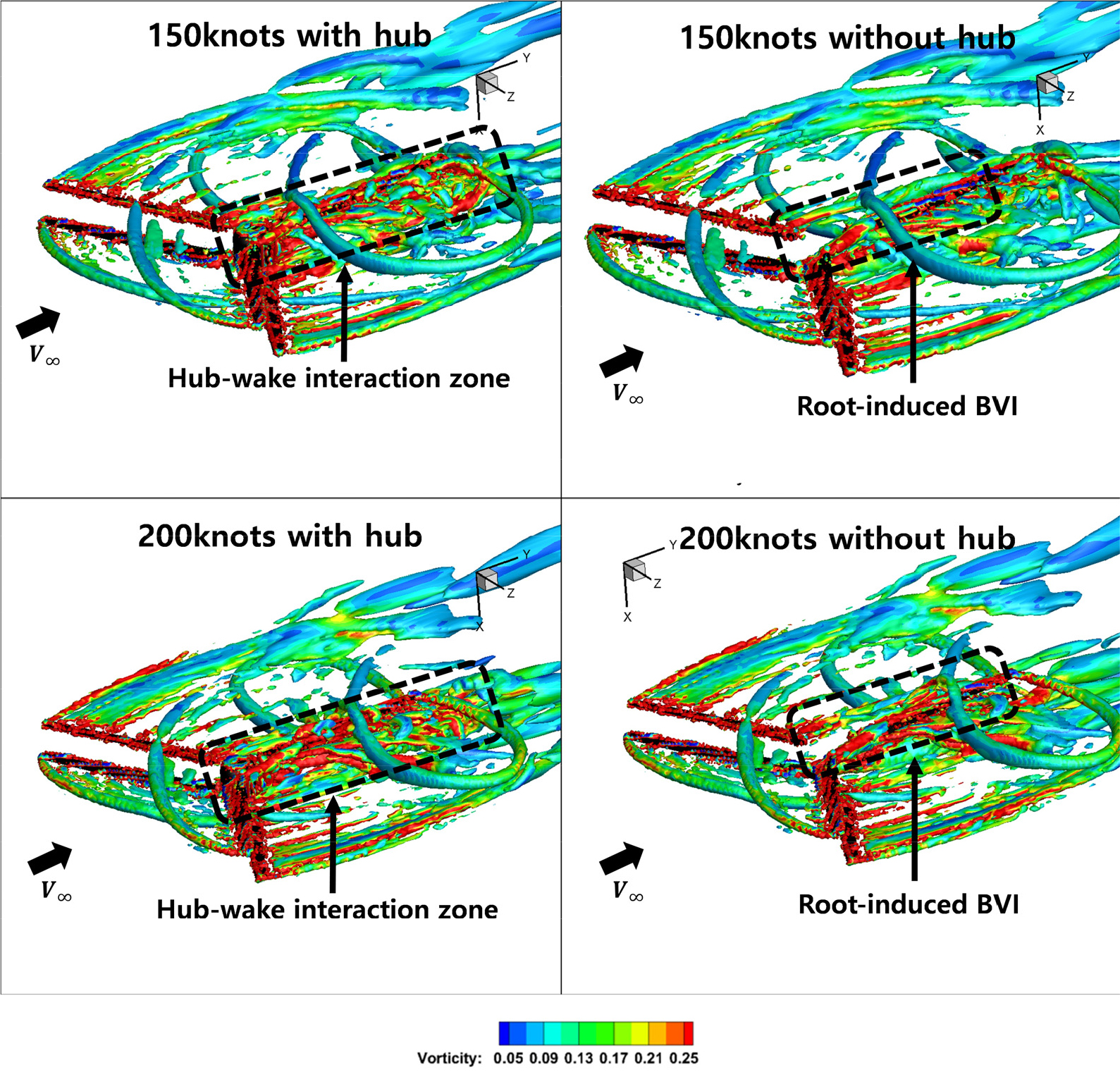
여기서 등가 면(Iso-surface)은 lambda2 criterion이 –0.001이며, 등가 면의 색은 와도(vorticity)의 크기를 나타낸다. 허브를 고려했을 때, 블레이드 루트에서 발생하는 와류와 허브에서 발생하는 와류가 방위각(Azimuth angle) 0도 근처의 영역을 지나는 블레이드와 상호 작용하는 것을 알 수 있다. 허브를 고려하지 않았을 때는 허브에서 발생하는 와류가 존재하지 않고 블레이드 루트에서 발생하는 와류만이 방위각 0도 근처의 영역을 지나는 블레이드와 상호 작용하는 것을 알 수 있다. 본 논문에서는 방위각을 각 로터의 회전 방향을 기준으로 정의하였다.
Fig. 9는 스팬 방향 75% 단면에서 단면 수직력(sectional normal force)을 나타낸 그림이고, Table 3은 각 경우의 트림 변수 결과이다. 전진 속도 150노트와 200노트에서 허브 유무와 관계 없이 트림 변수의 결과는 유사한 경향을 보였다. 트림 변수 결과가 유사하므로 방위각 30도에서 360도 구간에서는 단면 수직력 분포가 비슷하게 나타났으나, 방위각 0도에서 30도 부근에서는 차이를 보였다. 특히, 전진 속도 200노트에서 상부 로터의 경우, 허브를 고려하지 않았을 때 방위각 10도 근처에서 발생하는 피크가 허브를 고려한 경우와 다른 양상을 보였다. 이는 블레이드 루트에서 발생하는 와류가 방위각 10도 근처를 지나는 블레이드에 영향을 주는 root-induced BVI의 차이 때문이다. 허브가 없는 경우, 루트에서 발생하는 와류가 허브와 상호작용하지 않고 그대로 방위각 10도 근처를 지나는 블레이드에 영향을 주고, 허브가 있는 경우에는 루트에서 발생하는 와류가 허브와 상호작용하며 영향을 주기 때문에 다른 양상을 보이는 것이다.
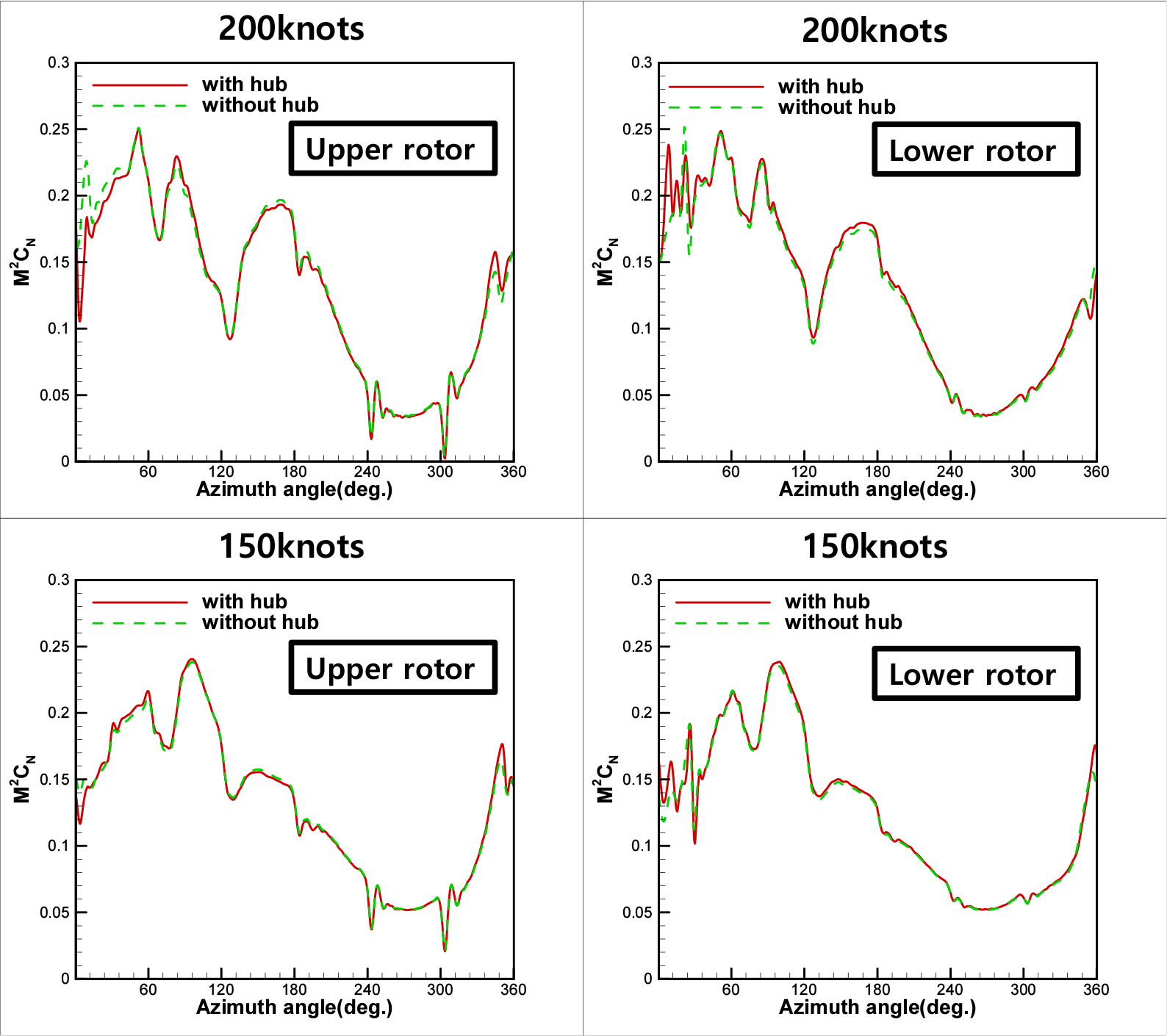
Table 3.
Results of trim value
또한, 두 전진 속도 모두 허브를 고려했을 때, 하부 로터에서 추가적인 피크가 발생하거나 피크가 더욱 강하게 나타난다. 전진 속도 200노트에서는 하부 로터에서 2개의 추가적인 피크가 발생하였고, 전진 속도 150노트에서는 하부 로터에서 피크의 크기가 증가하는 경향을 보였다. Fig. 10의 좌측 그림은 전진 속도 200노트에서 하부 로터의 단면 수직력 분포를 방위각 0도에서 20도 사이의 범위로 확대하여 나타낸 것이다. Fig. 10의 우측 그림은 전진 속도 200노트에서 허브 유무에 따른 하부 로터의 압력계수 분포를 방위각 0도와 8도에서 비교한 것이다.
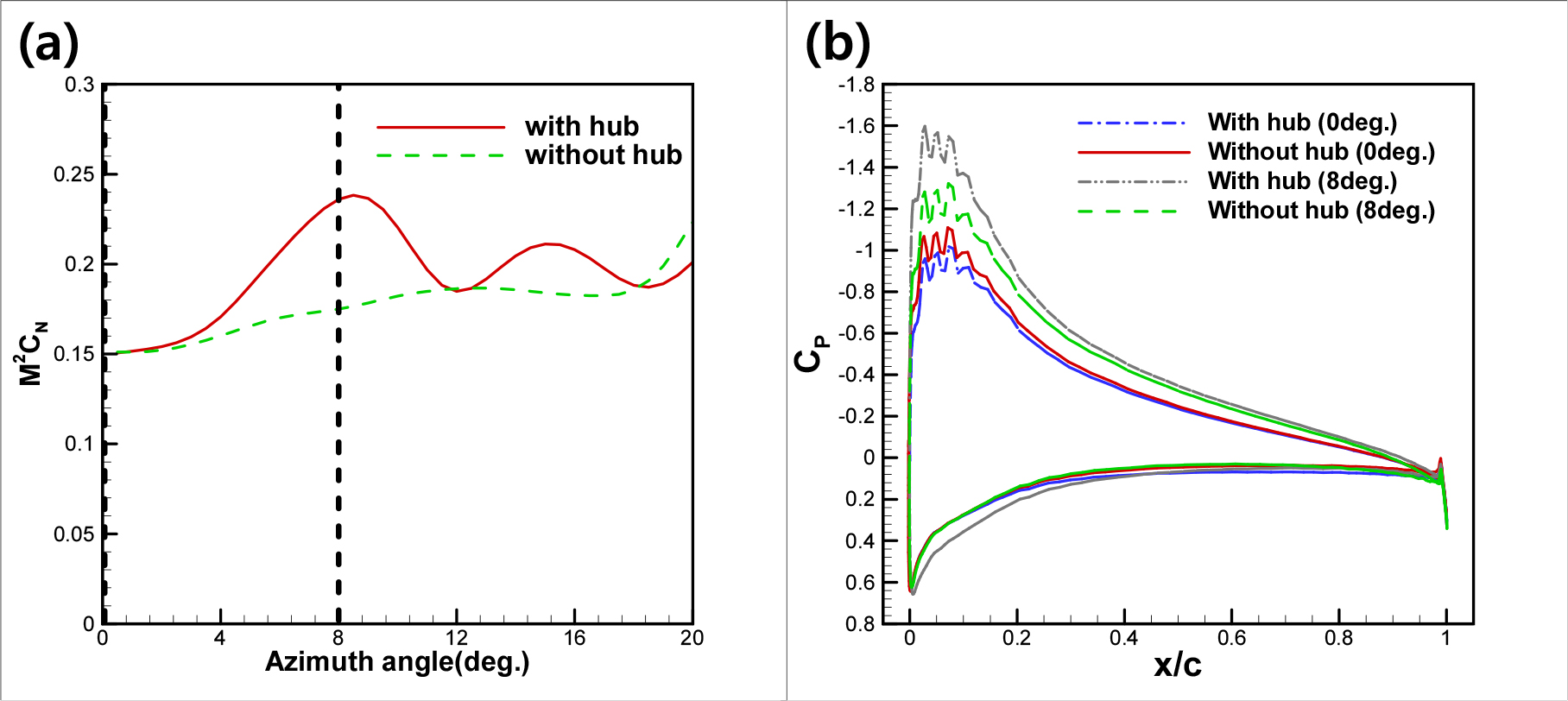
방위각이 0도일 때는 허브 유무와 관계없이 단면 수직력과 압력계수 분포가 유사하게 나타난다. 그러나 방위각이 8도일 때 허브를 고려하면, 트림 값이 유사함에도 불구하고 단면 수직력에 피크가 발생한다. 이는 Fig. 10의 우측 그림에서 볼 수 있듯이, 허브를 고려한 경우 허브에서 생성된 저압의 와류가 로터 블레이드 윗면에 영향을 미치기 때문이다. 상부 로터보다 하부 로터에 추가적인 피크가 발생하는 이유는 상부 로터와 하부 로터 사이에 위치한 허브에서 발생한 와류가 로터의 내리흐름(downwash)과 블레이드의 pre-cone 각도에 의해 하부 로터에 더 근접하여 압력분포에 영향을 주었기 때문으로 판단된다.
5. 결 론
본 논문에서는 CFD-Trim 연계 해석 기법을 이용하여 트림 상태에서 리프트 오프셋 동축반전 로터의 허브 효과를 분석하였다. CFD-Trim 연계 해석 기법을 사용하였을 때, 허브를 고려한 경우와 고려하지 않은 경우 모두 5회의 트림 반복으로 수렴하였으며, 리프트 오프셋과 추력 계수는 1% 미만의 오차를, 토크 차는 2% 이내의 오차를 나타냈다. 리프트 오프셋 동축반전 로터에 대해 CFD-Trim 연계 해석 기법을 사용하였을 때, 트림 정확도를 충분히 확보하면서도 계산 비용을 절감할 수 있음을 보였다.
트림 상태에서 공력 해석을 하였을 때, 허브에서 발생하는 와류가 블레이드 루트에서 발생하는 와류와 상호 작용하며, 방위각 0도 근처를 지나는 블레이드에 영향을 미치는 것을 확인하였다. 특히, 하부 로터에서는 허브에서 발생한 와류가 로터의 내리흐름과 플랩 운동으로 인해 추가적인 피크가 발생하였다.
동축반전 로터에 대해 전산 유체 해석을 할 때, 허브 유무에 따라 피크의 개수, 크기가 차이 난다. 이러한 피크를 정확히 포착하는 것은 정확한 소음 해석을 위해 필수적이고, 향후 동축반전 로터에 대한 소음 해석 연구에서 허브를 고려한다면 더 정확한 소음 해석을 할 수 있을 것으로 예상된다.
