

1. 서 론
2. 전산해석 기법
2.1 공력 해석 기법 : LBM 기법
2.2 소음 해석 기법: FW-H 음향상사법
3. LBM 해석자 검증
3.1 PROWIM(Propeller-Wing Interaction Model) 실험 모델
3.2 LBM 해석자 검증 결과
4. 전산해석 모델 및 조건
4.1 분산전기추진시스템과 등가 단일 프로펠러 모델
4.2 계산 격자 및 전산해석 조건
5. 전산해석 결과
5.1 등가 단일 프로펠러와 분산전기추진 시스템 프로펠러 간 후류 효과 비교 분석
5.2 등가 단일 프로펠러와 분산전기추진 시스템 프로펠러 간 소음 비교 분석
6. 결 론
1. 서 론
최근 항공 산업은 탄소중립(Net-Zero Emission) 실현을 위한 전 세계적 노력에 따라, 기존 화석 연료 기반의 항공기 운용 방식에서 벗어나 보다 지속 가능하고 고효율적인 대체 추진시스템을 요구받고 있다[1]. 국제민간항공기구(ICAO), 유럽항공안전청(EASA) 및 미국 항공우주국(NASA) 등은 2050년까지 항공 부문 온실가스 배출량을 획기적으로 감축하기 위한 전기 추진 시스템, 수소연료전지, 지속 가능한 항공연료(Sustainable Aviation Fuel, SAF) 등의 다양한 기술을 제시하고 있으며, 그 중 전기 추진 기반의 항공 기술은 차세대 항공 기술로 주목받고 있다[2]. 특히 도심 내 항공 교통체계 구현을 목표로 하는 도심 항공 모빌리티(Urban Air Mobility,UAM)가 등장하면서, 차세대 항공기 설계에는 단순한 추진 효율뿐만 아니라 저소음, 구조 경량화, 에너지 효율 등 다양한 성능 조건이 동시에 요구되고 있다. 이러한 기술 발전의 흐름 속에서 분산전기추진시스템(Distributed Electric Propulsion, DEP)은 기존의 단일 추진 기반 구성과는 차별화된 새로운 형태의 추진 방식으로 주목받고 있다[3]. 분산전기추진시스템은 다수의 소형 추진 장치를 날개 또는 기체 표면에 분산 배치함으로써, 추진력 분산을 통해 추진시스템의 Redundancy 확보하고 조종성을 향상시킬 수 있는 장점이 있다[4]. 특히 날개 주위에 배치된 프로펠러에서 생성되는 가속된 후류 유동은 날개의 양력 성능을 향상시키고 날개 표면에서의 유동 박리 현상을 지연시켜 최대 양력 계수 향상에 도움을 준다[5]. 이와 같은 분산전기추진시스템의 공기역학적 이득으로 NASA의 X-57 Maxwell, Lilium Jet, Volocopter 등 분산전기추진시스템을 활용한 다양한 미래형 항공기 개발 연구가 활발하게 수행되고 있다[6,7,8,9]. 하지만, 분산전기추진시스템은 다수의 프로펠러를 기체에 분산 배치함으로써 공력적인 이점을 확보할 수 있으나, 다수의 추진시스템과 날개와의 상호작용이 강하게 발생하는 것이 특징이다. 프로펠러에서 발생하는 후류는 날개 표면에 비정상적인 공력 하중을 유도하며, 이는 날개의 공기역학적 성능뿐만 아니라 구조 진동을 유발할 수 있다[10]. 특히 날개와 인접한 위치에 배치된 프로펠러에서 생성되는 후류는 날개 전반의 압력 분포를 변화시키고, 이에 따른 공력 하중 불균일성과 난류 구조는 음향 방사 특성에도 직접적인 영향을 준다[11]. 따라서 분산전기추진시스템을 적용한 항공기를 설계하기 위해서는 프로펠러와 날개 간에서 발생하는 공력적 간섭 효과에 대한 정확한 예측과 분석이 필요하다.
프로펠러와 날개 간 상호작용에 대한 중요성이 높아짐에 따라, 공기역학적 특성에 미치는 영향을 분석하기 위한 전산해석 및 실험 기반 연구도 활발히 진행되고 있다. Chandukrishan 등[12]은 Tractor와 Pusher 타입을 구분하여 프로펠러 후류가 날개 전반에 미치는 영향을 비교 분석하였으며, Tractor 타입의 공력 성능이 상대적으로 우수함을 확인하였다. Tai 등[13]은 패널 기반 수치해석 방법을 통해 Upwash 및 Downwash 효과에 따른 날개 압력 분포 변화를 검증하였고, KARI의 OPPAV(Optional Piloted PAV) 비행체에 적용하여 프로펠러 구동이 날개 전반의 공력 하중 분포에 미치는 영향을 분석하였다. 프로펠러와 날개 간의 상호작용이 공력 성능뿐만 아니라 소음 성능에 미치는 연구들도 수행되었다. Jamaluddin 등[14]은 고정된 프로펠러에 대해 날개의 상대적 위치를 수직으로 변화시키며 추력 계수와 방사 소음을 동시에 측정하였고, 날개 위치가 양력뿐 아니라 고주파 소음 발생에 큰 영향을 미치는 것을 확인하였다. Akiwate 등[15]은 프로펠러 매수와 날개 유무에 따른 유동 구조 및 소음 방사 특성을 분석하였으며, 특히 7매의 블레이드 구성 대비 6매의 블레이드 구성에서 대칭적인 유동 구조 발달로 인해 소음을 상쇄효과가 발생하였고, 이로 인해 약 3 dB 소음이 저감되었다. Turhan 등[16]은 두 개의 프로펠러를 겹치도록 중첩 배치한 후, 프로펠러 간의 이격 거리에 따른 소음 성능을 실험적으로 측정하였고 이격 거리가 작아질수록 톤 소음 성분이 최대 14 dB까지 증가됨을 확인하였다. 또한, Acevedo-Giraldo 등[17]은 날개 후방에 배치된 멀티 프로펠러에서 발생하는 설치 효과(Installation Effect)가 저주파 소음 증폭을 유발한다는 점을 확인하였으며, 소음 영향에 있어 프로펠러 간 간격과 배치가 결정적인 인자임을 강조하였다.
선행연구 조사를 통해 Pusher, Tractor 프로펠러의 타입, 날개와의 상대적인 위치, 회전 방향, 개수 등은 프로펠러와 날개 간의 상호작용 현상, 이로 인한 영향성을 결정하는 주요 설계 인자임을 확인하였다. 또한, 대부분의 기존 연구에서는 프로펠러-날개 간의 상호작용 효과가 날개 또는 프로펠러의 공력 또는 소음 성능에 미치는 영향을 분석하는 것이 주된 목적이었다. 본 연구에서는 3개의 프로펠러로 구성된 분산전기추진시스템에서 발생하는 추력과 동일한 추력 성능을 갖은 1개의 등가 단일 프로펠러를 비교 대상으로 설계하고, 후류 유동이 날개의 공력 성능에 미치는 영향과 소음 수준을 고정밀도 전산해석을 통해 비교 분석하였다. Lattice Boltzmann Method(LBM) 기반의 상용 소프트웨어인 PowerFLOW를 사용하여 전산 유동 해석을 수행하였으며, 소음 해석에서는 비투과면(Impermeable Surface) 기반의 Ffowcs Williams-Hawkings(FW-H) 음향 상사법을 사용하였다. LBM 기법을 통해 도출된 프로펠러의 추력, 날개의 양력 결과를 실험 결과와 비교함으로써 전산 해석 결과의 정확성을 검증하였다. 또한, 프로펠러의 개수가 공력 및 소음 성능에 미치는 영향을 분석하기 위해 표면 압력 분포, 후류 구조, 공력 성능 및 소음 세기를 비교하였다.
2. 전산해석 기법
2.1 공력 해석 기법 : LBM 기법
격자 볼츠만 방법(Lattice Boltzmann Method, LBM)은 유동 내 입자의 확률 분포 함수(Probability Distribution Function, PDF)를 시간적 변화에 따라 나타내는 격자 볼츠만 방정식(Lattice Boltzmann Equation, LBE)을 기반으로 한다. 본 기법은 볼츠만 방정식을 격자 내에서 직접 이산화(Discretization)하고, 이를 속도 분포 함수 형태로 단순화하여 유체의 유동 특성을 효율적으로 모사할 수 있다[18]. 입자 간 상호작용은 국소 충돌 모델(Local Collision Model)을 통해 계산되며, 이를 통해 유동장의 비정상 거동을 수치적으로 계산할 수 있다. LBM 기법은 유한체적법(Finite Volume Method, FVM)을 기반으로 하는 기존 전산유체역학 해석 기법에 비해 여러 가지 장점을 가진다. 지배방정식이 대수 방정식 형태로 이루어져 있어 행렬에 대한 계산 없이 단순화된 형태로 빠른 계산이 가능하다[19]. 특히 유동 영역을 격자 형태로 구성함으로써 복잡한 형상이나 경계 조건을 보다 쉽게 처리할 수 있으며, 병렬 계산에 최적화된 구조를 통해 현대 고성능 컴퓨팅 환경에서의 효율적인 구현이 가능하다. 이에 따라 최근 LBM 기법을 사용하여 공력 소음 해석 연구가 다수 수행되고 있다[20,21,22,23].
LBM에서 유동 입자의 확률적 분포는 분포 함수(Distribution Function)로 표현되며, 각 격자의 지정된 방향으로 움직이는 이동(Streaming) 과정과 부딪히는 충돌(Collision) 과정을 통해 물리적 현상을 나타낸다. 이러한 유동 입자의 이동과 충돌은 식 (1)의 지배방정식으로 표현된다.
여기서 F는 시간 및 공간상에서의 입자 확률 분포 함수(Probability Distribution Function), V는 입자의 속도 벡터, C는 충돌(Collision) 연산자를 의미한다. 식 (1)은 시간() 및 공간()에 대해 이산화될 수 있으며, 이는 식 (2), (3)으로 나타낼 수 있다.
이산화된 지배방정식에서 은 n번째 방향의 분포 함수, 은 격자 방향에 따른 입자의 이산 속도를 의미한다. 충돌 항인 은 Bhatnagar-Gross-Krook(BGK) 완화 모델을 사용하여 표현되며[24], 이때 𝜏는 완화 시간(Relaxation Time), 는 평형상태의 Maxwell Boltzmann 분포함수이다. 완화 시간 𝜏는 점성과 온도의 함수이며, 평형 분포 함수는 Chen 등[25]에 의해 제시된 2차 Taylor 전개를 통해 근사할 수 있다.
외부로부터 힘이 존재하지 않는 조건에서의 유동은 평형 분포 함수를 기반으로 표현되며, 이는 정지 상태의 유동 내 입자 분포를 나타낸다. 여기서 는 거시적 속도(Macroscopic Velocity), 는 번째 방향에 대한 가중치(Weight)를 의미하며, 그 값은 입자의 이동 방향에 따라 식 (5)와 같이 정의된다.
공간 이산화를 위해 모델이 사용되며, 이는 차원 공간에 대해 개의 속도 방향을 정의하는 모델이다. 본 연구에서는 3차원 유동 해석을 위해 총 19개의 속도 방향을 갖는 모델을 사용하였다. 가중 함수 은 모델에 따라 고정된 값으로 정의되며, 식 (5)를 기반으로 분포 함수를 계산함으로써 유동의 밀도와 운동량을 도출한다.
2.2 소음 해석 기법: FW-H 음향상사법
LBM은 기본적으로 압축성 및 비정상 유동 특성을 가지고 있기 때문에, 유동장 내 음압을 직접 계산하는데 적합한 기법이다[26]. 그러나 정확한 소음 예측을 위해서는 수음자와 소음원 사이의 조밀한 격자가 필요로 하기 때문에 계산 비용적 관점에서는 현실적으로 비효율적이다[27]. 따라서 원거리 방사 소음을 예측하기 위해서는 유동장과 소음장을 분리해서 계산하는 Hybrid Method를 이용하는 것이 효과적이다. 본 연구에서는 근거리 유동장 데이터로부터 원거리 소음을 예측하기 위해 Hybrid Method 중 하나인 Ffowcs-Williams & Hawkings(FW-H) 방정식[28]을 사용하였다. 본 연구에서는 프로펠러와 날개에 의한 표면 소음원인 두께 소음, 하중 소음 영향을 고려하기 위해 비투과면(Impermeable) 기반의 FW-H 음향 상사법을 적용하였다. Farassat 1A 식 (8), (9), (10)을 사용하여 시간영역에서의 두께소음(Thickness Noise)과 하중소음(Loading Noise)의 영향을 고려하였다. 식 (8)에서 는 프로펠러의 두께 소음원, 은 공기력 하중 소음원에 의한 음압을 의미하며 식 (9)와 식 (10)에 표현된 대괄호 안의 항들은 지연시간(Retarded Time)에서 계산된 값을 의미한다.
각각의 식에서 는 밀도, 는 음속을 나타내며 과 은 방사 방향과 블레이드 표면으로부터 수직 방향으로의 물성치를 의미한다. 은 마하수를 나타내며 같이 윗첨자가 있는 항은 시간에 대한 미분한 값을 나타낸다. 소음원()과 수음자() 간의 거리()로 인해, 수음자 시각(t)에서 관측되는 음압은 실제로 발생한 시점보다 늦게 전파된다. 이에 따라 소음원과 수음자 간의 거리와 지연시간은 식 (11), 식 (12)으로 정의된다.
3. LBM 해석자 검증
3.1 PROWIM(Propeller-Wing Interaction Model) 실험 모델
본 연구에서는 다수의 프로펠러로 구성된 분산전기추진 시스템과 등가 단일 프로펠러 간의 비교 분석 연구를 수행하기에 앞서 Delft University에서 진행한 PROWIM(Propeller-Wing Interaction Model) 실험 모델[29]을 이용하여 LBM 해석자에 대한 검증 연구를 수행하였다. Fig. 1과 같이 PROWIM 모델은 단일 Tractor 프로펠러가 날개 단면에 장착된 형상으로, 날개와 프로펠러에 대한 공력 측정 결과를 모두 제공하기 때문에 날개-프로펠러 간의 상호 유동 간섭 영향성을 정량적으로 분석할 수 있어 검증 모델로 널리 활용되고 있다. 날개 형상은 NACA 642-A015 단면으로, 날개 시위 길이 240 mm, 스팬 길이 640 mm로 구성되어 있다. 프로펠러의 지름은 236 mm이고 단면 형상은 Clark Y 에어포일이며 4엽 블레이드로 구성되어 있다. PROWIM 형상은 Fig. 1에 나타내었고 LBM 해석자 검증에 적용한 실험 유동 및 시뮬레이션 조건은 Table 1에 정리하였다. 자유류 마하수(Freestream Mach number) 0.14와 날개 시위길이 (c) 240 mm 기준으로 계산한 레이놀즈 수(Reynolds number)는 804,000이다. 본 연구에서는 날개 받음각(Wing angle of attack) 0°, 4° 조건을 고려했으며 전산해석은 프로펠러 회전 기준으로 20회 동안 시간 간격 0.01° 조건을 적용하여 수행하였다.
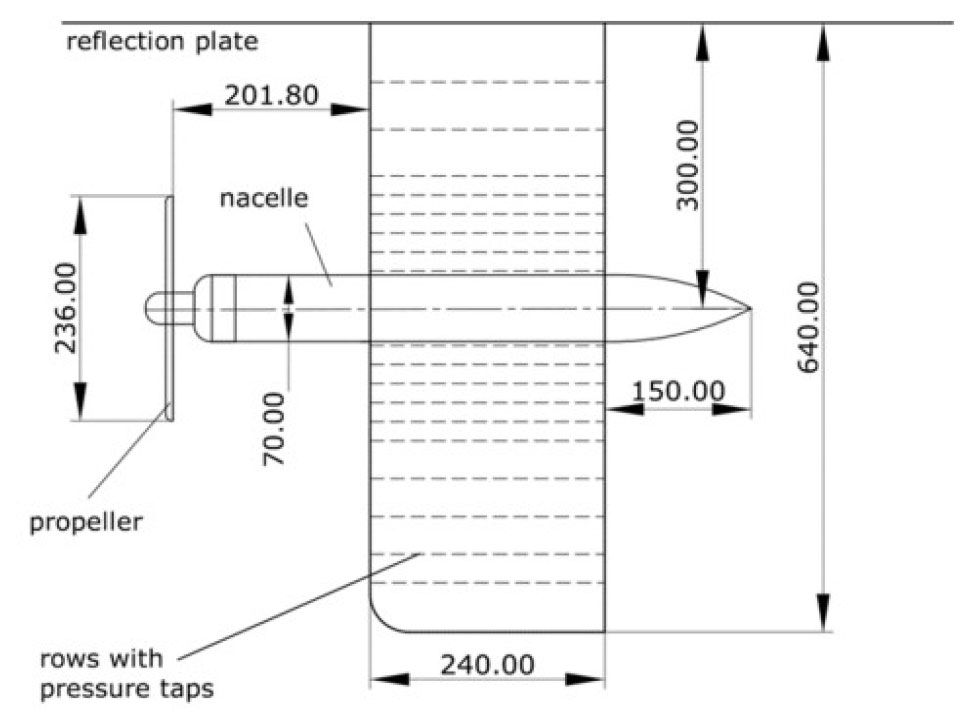
Table 1.
Flow conditions of PROWIM validation case
| Freestream Mach number(M∞) | 0.14 |
| Wing angle of attack(α) | 0°, 4° |
| Pressure | 92,499.6 Pa |
| Reynolds number(Re) | 804,000 |
| Rotating speed | 15,000 RPM |
3.2 LBM 해석자 검증 결과
날개-프로펠러 형상인 PROWIM 모델의 프로펠러 추력 계수를 LBM 해석을 통해 예측하였고 실험 결과[29]와 비교하였다. 자유류 마하수는 0.14 조건으로 고정한 채 프로펠러의 회전속도를 조절하여 전진비 0.5~1.0 조건에서 검증을 수행하였다. Fig. 2와 Table 2에서 확인할 수 있듯이, 전진비가 증가함에 따라 추력 계수는 선형적으로 감소하는 경향을 보였다. 이러한 경향은 자유류 속도가 고정된 조건에서 전진비가 증가할수록 (회전속도가 감소할수록) 프로펠러 입장에서는 단면의 유효 받음각(Effective angle of attack)이 감소하기 때문이다. 유효 받음각이 줄어들면서 각 블레이드 단면에서 생성하는 추력이 낮아져 전체 프로펠러의 추력 계수가 감소하였다. 모든 전진비 조건에 실험값과 정량적으로 매우 유사한 LBM 해석 결과가 도출되었고 오차율이 약 5% 이하로 분포하였다. 이를 통해 본 연구에서 활용한 LBM 해석자가 프로펠러의 공력 성능을 비교적 정확하게 예측할 수 있음을 확인하였다.
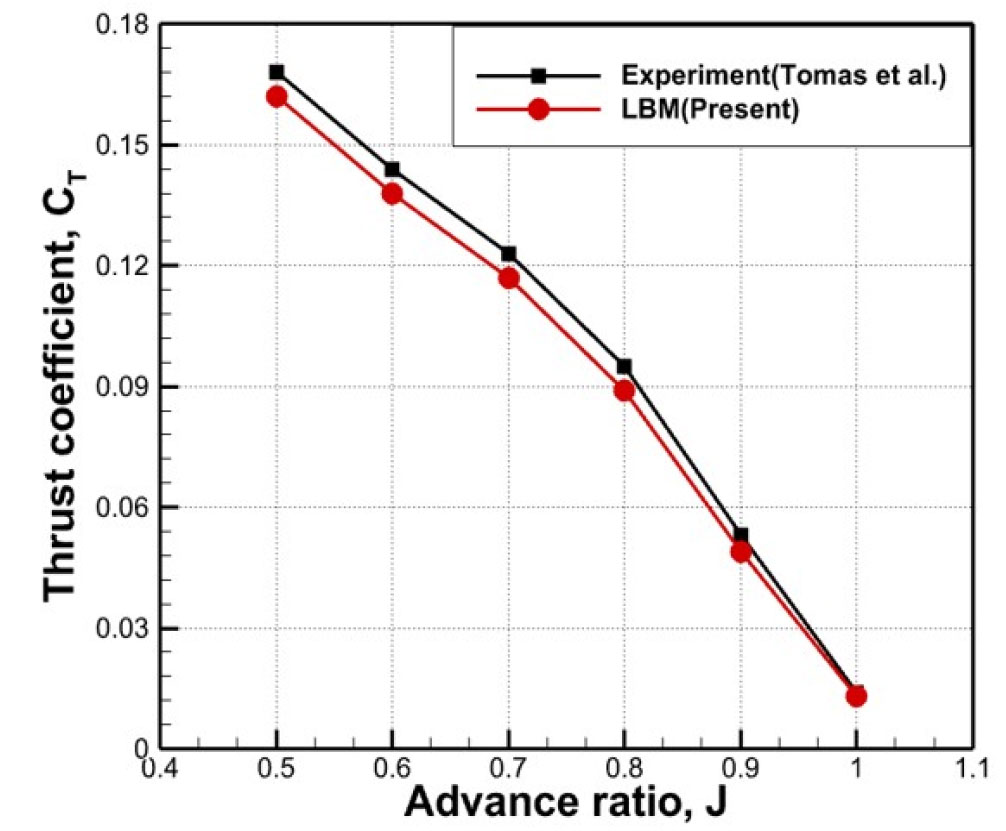
Table 2.
Comparison of propeller thrust coefficients obtained from LBM analysis and experimental data at various advance ratios
| Advance ratio | Experiment | LBM(Present) |
| 0.5 | 0.168 | 0.162 |
| 0.6 | 0.144 | 0.138 |
| 0.7 | 0.123 | 0.117 |
| 0.8 | 0.095 | 0.089 |
| 0.9 | 0.053 | 0.049 |
| 1.0 | 0.014 | 0.013 |
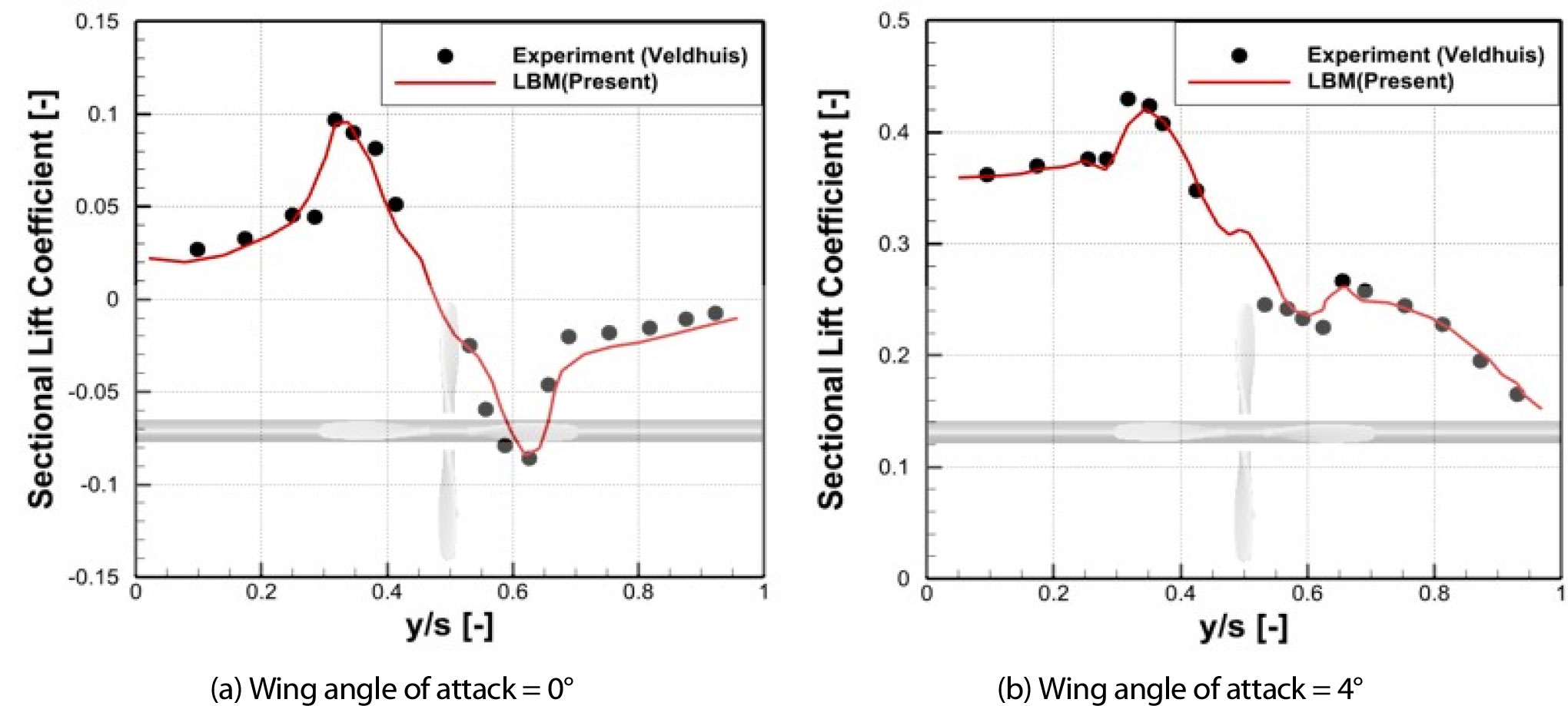
날개-프로펠러 형상에서는 프로펠러에서 발생한 후류가 하류 방향으로 전파되고 프로펠러 뒤쪽에 위치한 날개 주변의 유동장 발달에 직접적인 영향을 미친다. PROWIM 모델의 프로펠러 추력 검증을 마치고 프로펠러 후류 효과의 영향을 받는 날개의 양력 분포 검증을 수행하였다. Fig. 3에서는 전진비(Advance Ratio) 0.8, 받음각 α = 0°, 4° 조건에서 날개 길이 방향을 따라 분포한 단면 양력 계수를 예측하고 실험 결과와 비교하였다. 여기서 날개의 길이 방향 위치(y/s)를 날개 스팬 길이로 무차원화하여 나타내었다. Fig. 3에서 확인할 수 있듯이, 두 받음각 조건에서 날개 길이 방향으로 분포한 단면 양력 계수의 변화를 실험값과 대비 매우 유사하게 예측할 수 있었고 정량적으로는 오차율 5% 이내의 결과를 도출할 수 있었다. 또한, 프로펠러 후류의 영향을 직접적으로 받는 영역에서는 Upwash 현상으로 인해 국소적으로 양력 계수가 증가하였으며, Downwash 현상으로 인해 양력 계수가 감소하는 물리적 현상을 잘 예측하였다. 날개-프로펠러 형상에서 프로펠러 추력 성능, 날개 단면 양력 계수 분포 비교 검증을 통해 본 연구에서 활용한 LBM 해석자가 날개-프로펠러 간의 간섭현상을 해석하기에 타당함을 확인하였다.
4. 전산해석 모델 및 조건
4.1 분산전기추진시스템과 등가 단일 프로펠러 모델
본 연구에서는 PROWIM 모델을 참고하여 3개의 프로펠러가 적용된 분산전기추진시스템과 등가 단일 프로펠러 형상을 설계하고, 두 모델의 공력 및 소음 성능을 비교하였다. Fig. 4(a)는 동일한 끝단 마하수 조건에서 Fig. 4(b)의 3개의 프로펠러에서 발생하는 추력 합계와 동일한 추력을 만들 수 있도록 설계된 등가 단일 프로펠러 형상이다. 동일한 끝단 마하수 조건에서 동일한 추력을 생성하기 위해 기존의 PROWIM 프로펠러의 직경에 비해 1.75배 증가된 직경 0.415 m으로 설계되었다. Fig. 4(b)는 PROWIM 모델의 프로펠러 형상을 그대로 활용하였고, 프로펠러 3개를 균일한 간격으로 배치하였다. 프로펠러 끝단 간격은 0.5D로 설정하였으며, 여기서 D는 PROWIM 프로펠러의 직경이다. 날개와 프로펠러의 레이놀즈 수는 각각 날개 시위 기준과 프로펠러의 0.75R 반경에서의 레이놀즈 수를 계산하였다. 두 형상에 대한 자세한 파라미터는 Table 3에 정리하였다. Table 3에 제시된 요구 동력(Required Power)은 각 시스템의 총합을 나타낸다. 등가 단일 프로펠러의 요구 동력은 2919.71 W인 반면, 분산전기추진시스템의 경우 프로펠러 1개당 약 1817.4 W의 동력이 필요하며 3개의 총합은 5452.23 W이다. 분산전기추진시스템의 개별 프로펠러 요구 동력은 더 작지만, 시스템 전체의 총 요구 동력은 높게 나타났다. 동일한 끝단 마하수 조건을 만족하기 위해 크기가 확대된 단일 프로펠러 형상의 회전 속도가 DEP 시스템에 비해 감소하였다. 또한, 두 형상의 프로펠러 뒤쪽에는 NACA 642-A015 에어포일로 구성된 직사각형 날개가 동일하게 위치하고, 날개의 시위 길이(c)는 240 mm, 스팬 길이(S)는 1,000 mm이다.
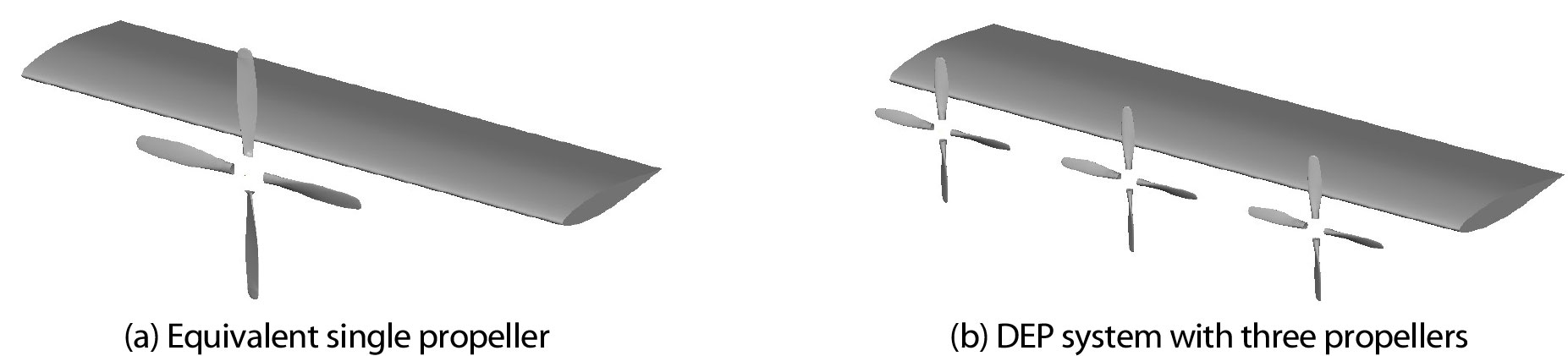
Table 3.
Geometric and operating parameters for the computational analysis models
4.2 계산 격자 및 전산해석 조건
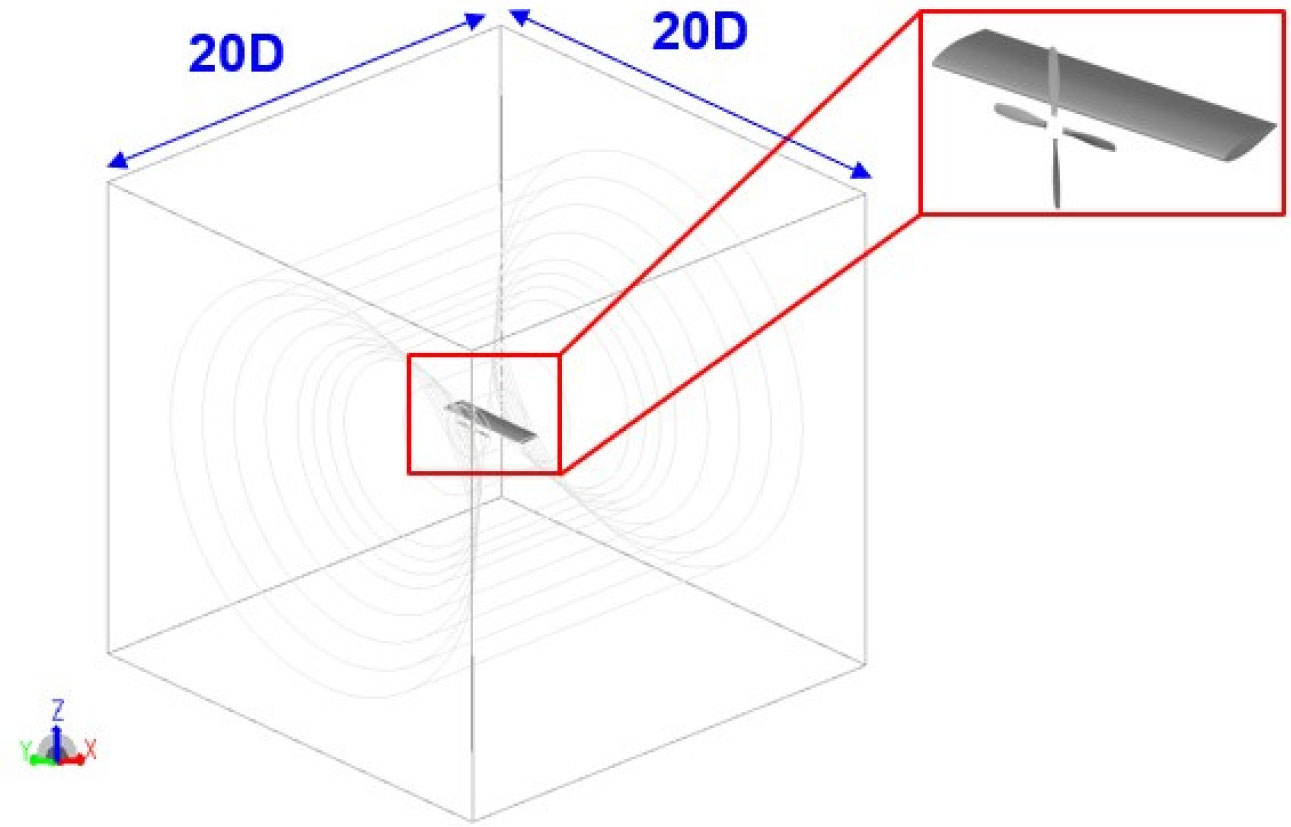
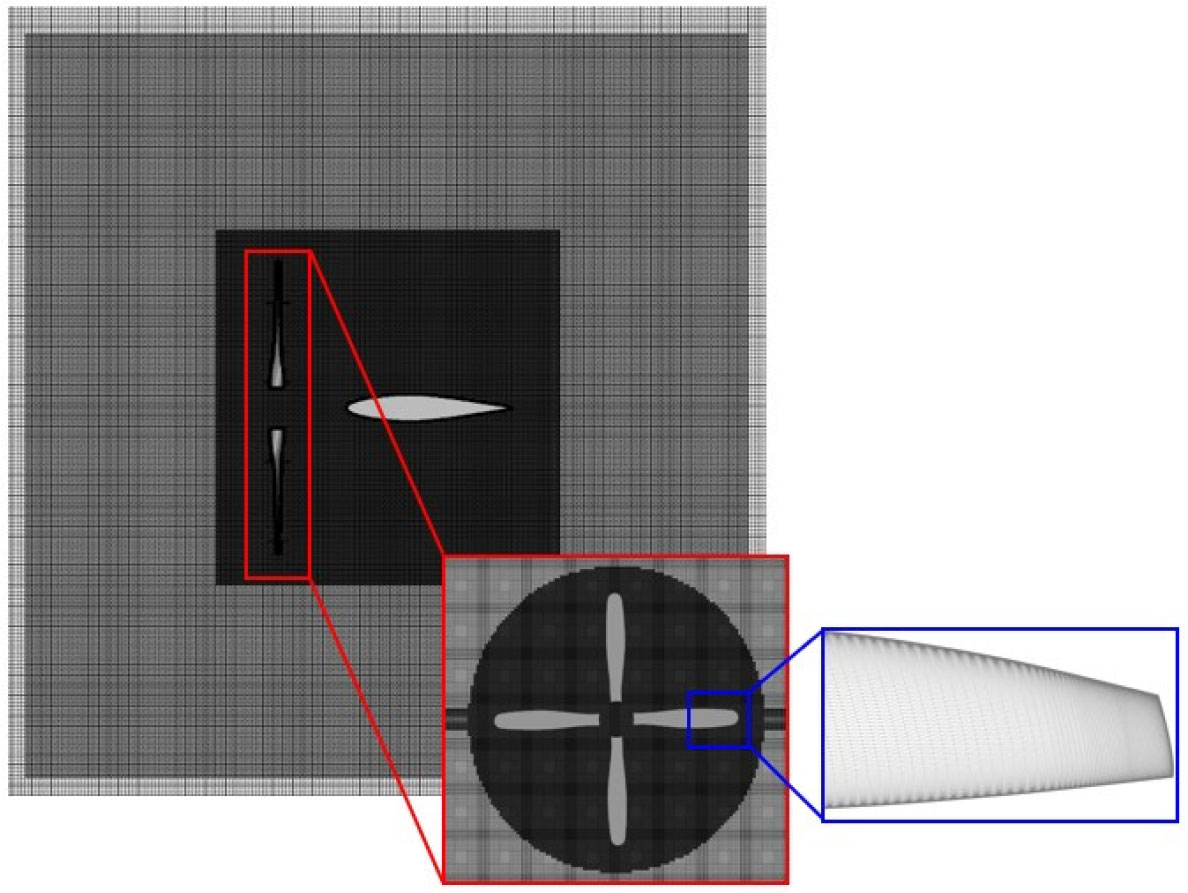
LBM 해석을 위해 프로펠러 직경(D)을 기준으로 각 방향으로 20D의 길이를 갖는 정육면체 형태로 계산 영역을 구성하였다(Fig. 5). 경계 조건으로는 프로펠러 회전면을 기준으로 전방에는 Velocity Inlet 경계 조건과 후방 및 나머지 면에는 Pressure Outlet 경계 조건을 적용하였다. 날개 및 프로펠러의 표면에는 점성 유동 효과를 고려하여 No-Slip Boundary 조건을 적용하였다. 계산 영역을 12개로 구분하고 PowerFLOW 해석자의 Variable Resolution(VR) 기능을 이용하여 격자의 조밀도를 조절하였다. VR 기능을 이용하면 구분된 영역의 격자 크기를 2배씩 순차적으로 조절할 수 있다. Fig. 6에서 확인할 수 있듯이 프로펠러 후류에 의한 날개 및 주변 유동장을 보다 면밀히 분석하기 위해 프로펠러 주위 격자의 밀집도를 높게 배치하였다. 최소 격자 크기는 날개 끝단 시위 길이의 약 0.1%에 해당하는 0.2 mm이며 LBM 해석에 활용한 전체 격자 수는 약 1.8억 개다. 프로펠러 주변으로는 실린더 형태의 회전 영역을 설정한 후 격자를 회전시키는 기법인 Sliding Mesh 기법을 사용하여 회전 효과를 부여하였다.
전산해석을 위한 유동 조건은 Table 4에 나타내었으며 Delft University에서 진행한 실험 조건을 기준으로 구성하였다. 자유류 마하수는 0.116으로 설정하였으며, 날개 받음각 0°, 4°, 10°의 세 가지 조건에서 비교 분석하였다. Fig. 4(a)의 등가 단일 프로펠러는 8,600 RPM으로 회전하며, Fig. 4(b)의 분산전기추진(DEP) 시스템은 프로펠러당 15,000 RPM으로 회전하도록 설정하였다. 두 경우 모두 Tip Mach number가 약 0.55로 동일하게 유지하였다. 프로펠러의 회전 기준으로 총 20회전을 수행하였으며, 비정상 해석 결과의 정량적 비교 및 분석을 위해 공력 및 소음 데이터는 마지막 5회전의 결과를 활용하였다.
Table 4.
Flow and simulation conditions
5. 전산해석 결과
5.1 등가 단일 프로펠러와 분산전기추진 시스템 프로펠러 간 후류 효과 비교 분석
등가 단일 프로펠러와 분산전기추진 시스템 프로펠러에서 발생하는 후류 효과에 의한 날개의 양력, 항력 변화를 분석하기 위해 후류 효과가 날개 윗면의 압력 분포에 미치는 영향을 분석하였다. Fig. 7은 날개의 받음각 0°, 4°, 10° 조건에서 날개 윗면의 정압(Static Pressure) 분포를 비교하였다. 두 형상 모두 받음각이 증가함에 따라 전반적으로 날개 윗면의 저압 분포가 강해지는 경향성이 관찰되었고, 프로펠러의 개수에 따라 Upwash, Downwash 영향이 발생하는 위치는 상이하지만 프로펠러 후류의 영향성이 공통적으로 관찰되었다. 단일 프로펠러 구성에서는 날개 중앙에 형성된 프로펠러 후류 유동으로 인해 해당 위치에서 크고 강한 세기의 Suction Peak가 형성되었지만, 분산전기추진 시스템에서는 3개의 프로펠러 후류가 날개 전반에 걸쳐 분산되어 위치함에 따라 날개 윗면에 다수의 Suction Peak가 형성되는 것을 확인할 수 있다. 이는 날개 전체에 걸쳐 유동 가속 효과가 발생했음을 나타내고, 특히 α = 10° 조건에서는 분산전기추진 시스템 구성에서 등가 단일 프로펠러 구성 대비 국소적인 저압 영역이 더 넓게 분포하였다.
Fig. 8은 날개 받음각 4° 조건에서 등가 단일 프로펠러 구성과 분산전기추진 시스템 구성에 대해 형성된 후류 구조를 와도 Iso-surface로 시각화한 결과이다. 등가 단일 프로펠러 구성에서는 중심부에 위치한 하나의 프로펠러에서 강한 나선형 와류가 생성되며, 날개 중앙에 집중된 후류 분포가 형성된다. 특히, 블레이드 끝단에서는 강한 팁 와류가 발달하여 국소적인 상승류(Upwash) 및 하강류(Downwash)를 유도하는 것이 확인된다. 이러한 집약적인 와류 구조는 날개 중앙부에서 유동이 급격히 가속 및 감속됨을 의미하며, 날개 표면의 비정상 하중 분포의 주요 원인으로 작용한다. 반면, 분산전기추진시스템 구성에서는 세 개의 소형 프로펠러 각각에서 유사한 나선형 후류가 개별적으로 생성되며, 이들이 스팬 방향으로 분포하면서 후류-날개 간섭현상이 발생한다. 각 프로펠러의 후류 강도는 등가 단일 프로펠러에 비해 낮지만, 전체 날개면에 걸쳐 보다 균일하게 유도 유동이 분포하게 되어 광범위한 영역에 걸쳐 Upwash/Downwash 영향을 유발한다. 이러한 유동 구조의 차이는 날개 윗면 유동장에 유의미한 변화를 초래하며, 압력 분포 및 양력 생성 양상에 영향을 미친다.
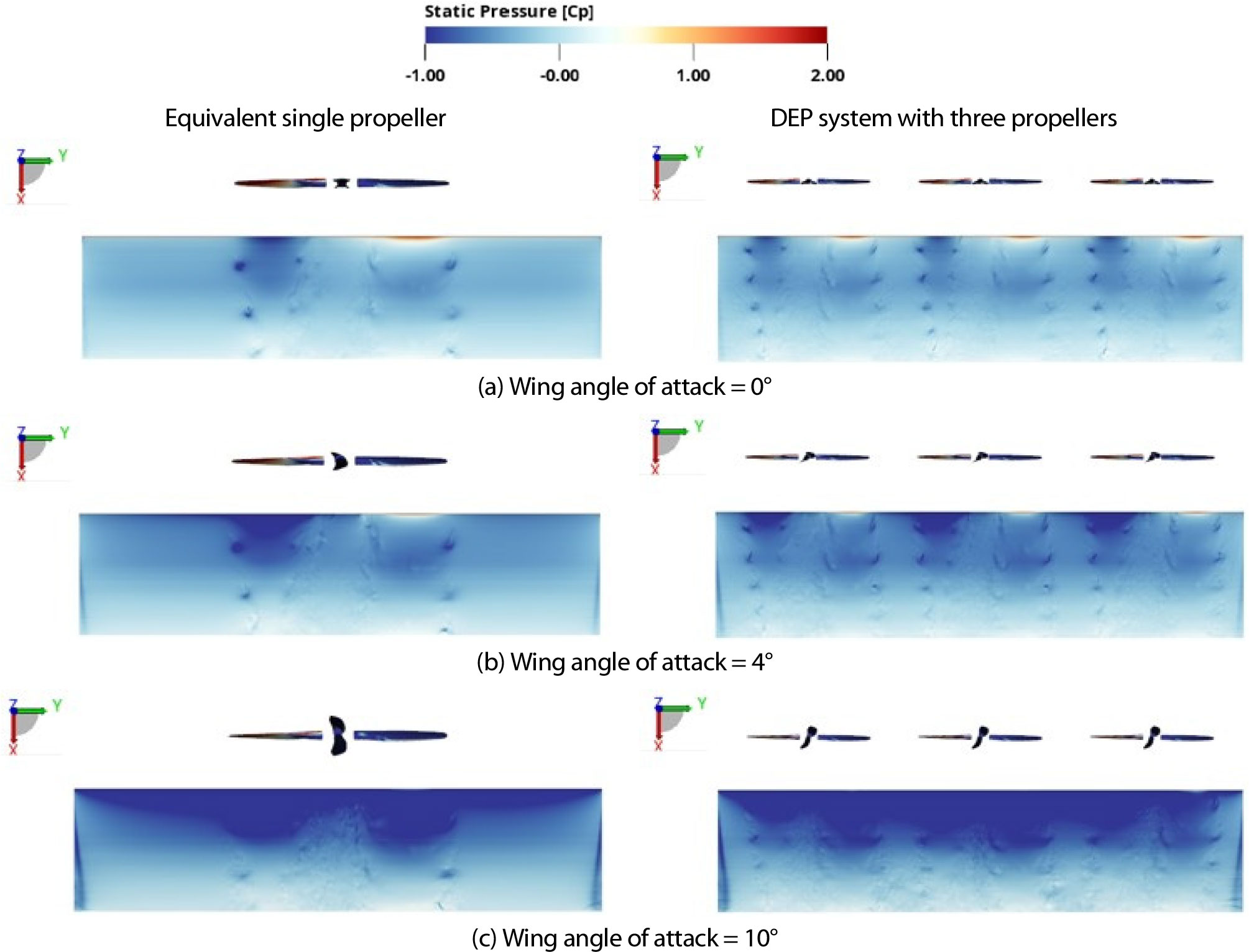
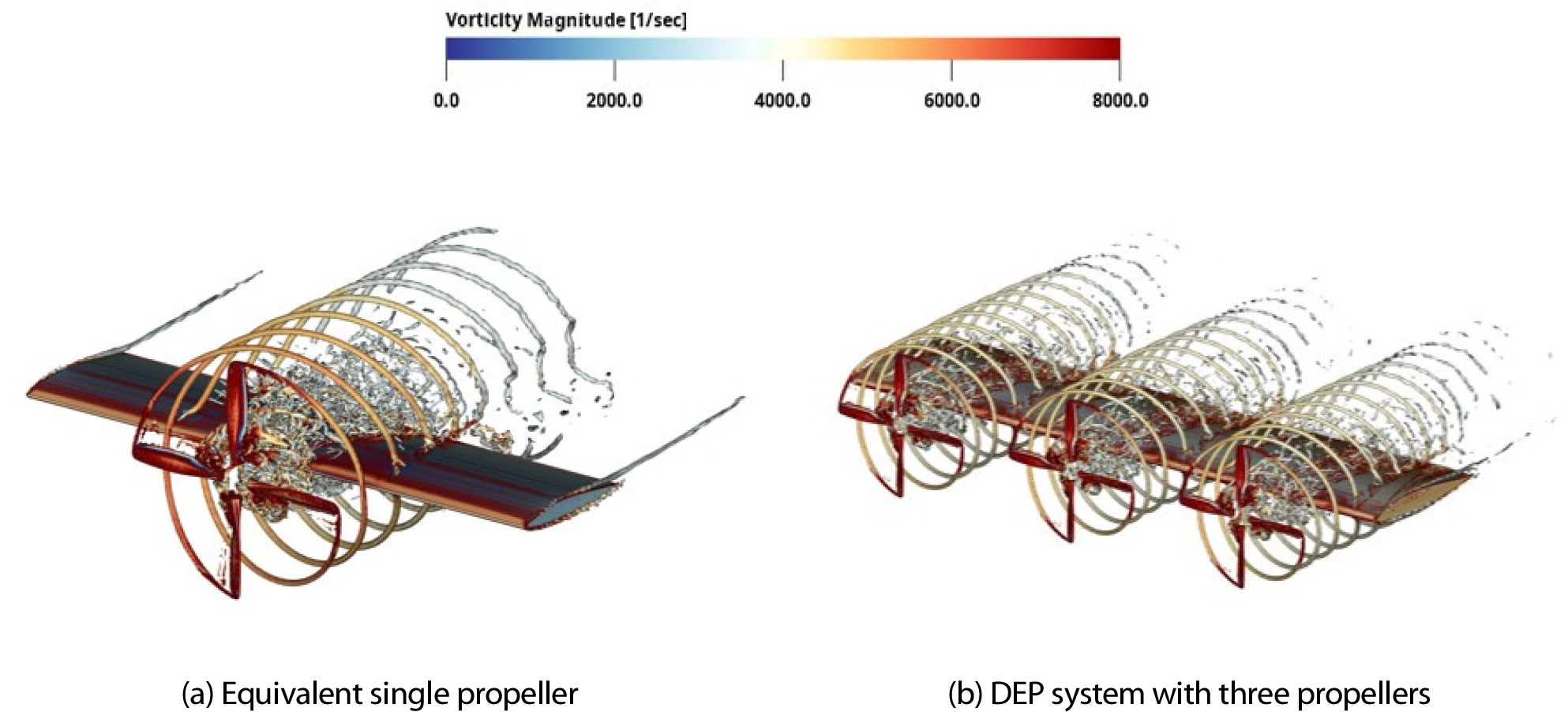
Fig. 9는 두 구성에 대해 날개 길이 방향에 따라 날개 윗면의 압력계수 분포(Cp)를 비교한 결과로, 각 프로펠러의 후류 구조가 날개 표면 압력 발달에 미치는 영향을 정량적으로 나타낸다. 압력계수 분포값은 받음각 4° 조건에서 날개 윗면의 Suction Peak가 발생하는 지점이며 날개 앞전으로부터 시위 방향 10% 지점에 해당한다. 등가 단일 프로펠러 구성에서는 중앙부에서 하나의 뚜렷한 강한 저압부(Suction Peak)가 형성되며, 이는 Fig. 8에서 나타난 강한 중심부 Upwash에 기인한 국소적인 유속 증가 및 압력 감소로 해석된다. 반면, 분산전기추진 시스템 구성에서는 세 개의 프로펠러 위치에서 각각 강한 저압부가 나타나고, 스팬 방향으로 반복적이고 주기적인 압력 분포 패턴이 형성된다. 이는 다수의 프로펠러 후류가 개별적인 유동 구조를 유지하면서 날개 전반에 걸쳐 유동 가속을 유도함을 의미한다. 또한, 평균 압력계수는 분산전기추진 시스템 구성에서 등가 단일 프로펠러 구성 대비 약 8.3% 낮게 나타났으며, 이는 날개 윗면의 유동이 보다 넓은 범위에 걸쳐 분산되어 가속됨을 시사한다. 이러한 차이는 Fig. 8에서 관찰된 Upwash/Downwash의 공간 분포 및 강도 비교에서도 확인할 수 있으며, 앞서 Fig. 7에서 나타난 정압 분포 차이의 주요 원인으로 해석될 수 있다. 결과적으로 프로펠러 구성 방식에 따른 후류 구조의 차이는 날개면 유동장 및 압력 분포에 직접적인 영향을 미치며, 이는 결과적으로 전체 양력 생성에 중요한 설계 변수로 작용한다.
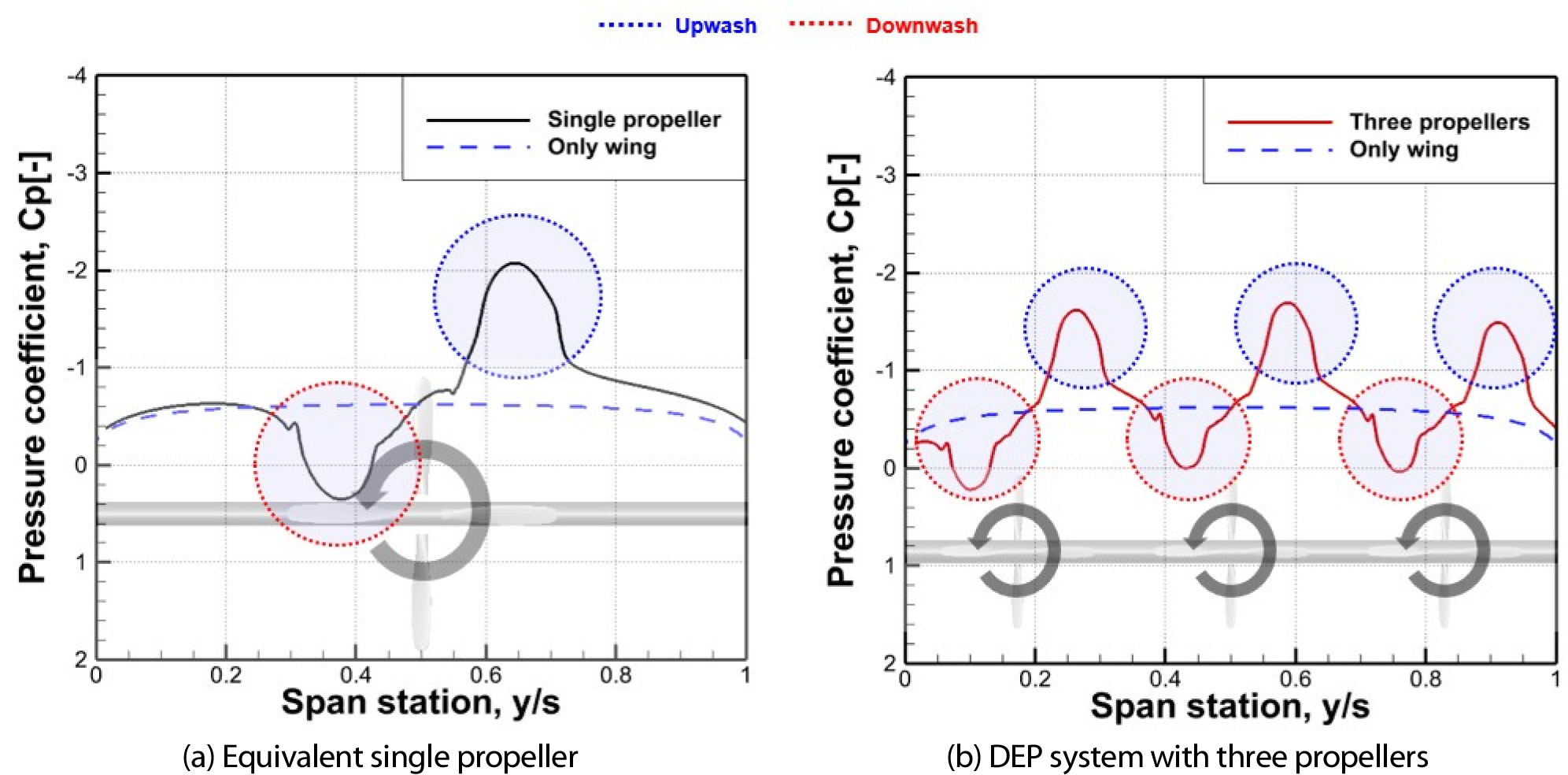
Table 5는 등가 단일 프로펠러 구성과 분산전기추진 시스템 구성 간의 양력 계수(CL), 항력 계수(CD) 및 양향비(L/D)의 변화를 날개 받음각 조건(4°, 10°)에 따라 정량적으로 비교한 결과를 제시한다. 두 받음각 조건 모두에서 분산전기추진 시스템 구성은 단일 프로펠러 구성 대비 양력 계수가 각각 약 5.0%, 6.5% 증가하였다. 이는 앞서 Fig. 9에서 확인된 바와 같이, 다수의 프로펠러 후류에 의해 날개 윗면의 유동이 광범위하게 가속되며, 저압 영역이 넓게 분포한 결과로 해석할 수 있다. 한편, 항력 계수는 분산전기추진 시스템 구성에서 일관되게 더 높은 수치를 나타냈다. 이는 다수의 회전하는 프로펠러로부터 발생한 후류가 날개 표면에 보다 복잡하고 불규칙한 경계층 유동을 유도하고, 그로 인해 마찰 항력(Friction Drag)이 상대적으로 증가한 것으로 판단된다. 이로 인해 양항비(L/D)는 DEP 시스템에서 평균적으로 약 5% 낮은 값을 보였으며, 이는 양력 증가에도 불구하고 항력 증가의 영향이 더 컸음을 시사한다. 결과적으로 분산전기추진 구성은 양력 향상에는 긍정적인 효과를 보이나, 동반되는 마찰 항력 증가로 인해 전체적인 공력 효율성(L/D) 측면에서는 오히려 성능 저하가 발생할 수 있음을 의미한다. 이는 분산전기추진 시스템 설계 시 양력 증대와 항력 저감을 동시에 고려한 최적화 접근이 필요함을 시사한다.
Table 5.
Comparison of lift coefficient, drag coefficient, and L/D for the equivalent single propeller configuration and the DEP system with three propellers at angles of attack of 4° and 10°
| Equivalent single propeller | DEP system with three propellers | |||||
| α | CL | CD | L/D | CL | CD | L/D |
| 4° | 0.268 | 0.027 | 9.925 | 0.281 | 0.031 | 9.064 |
| 10° | 0.631 | 0.0615 | 10.26 | 0.672 | 0.0682 | 9.85 |
5.2 등가 단일 프로펠러와 분산전기추진 시스템 프로펠러 간 소음 비교 분석
본 연구의 주된 목적은 다중 프로펠러로 구성된 분산전기추진시스템과 등가 단일 프로펠러 간의 정량적인 소음 비교를 통해 분산전기추진시스템의 소음 저감 효과를 분석하고자 한다. 따라서 프로펠러-날개 상호작용으로 발생하는 날개 소음은 따로 고려하지 않았고, 소음원으로는 프로펠러 블레이드만 고려하였다. 본 절에서는 날개 받음각 0도 일 때 동일한 추력 조건에서 프로펠러 개수 변화가 소음 성능에 미치는 영향을 정량적으로 분석하였다. 이를 위해 Fig. 10과 같이 마이크로폰 어레이를 설정하여 각 구성에 대해 방사 소음을 비교하였다. 마이크로폰은 프로펠러 회전 중심축을 기준으로 반지름 5S(S는 프로펠러 직경) 지점에 배치되었으며, 이는 방사 소음의 거리 감쇠를 고려하여 자유음장 조건에서의 비교를 가능하게 한다. Fig. 10(a)에 도시된 바와 같이, 마이크로폰은 수평면 기준으로 고도각(θ)을 22.5° 간격으로 나누어 총 16개의 위치에 균일하게 배치되었다. 이는 프로펠러에 의해 생성되는 소음의 주된 방향성과 강도를 비교하기 위한 배치이다. 추가로 Fig. 10(b)에서는 프로펠러가 전진 비행하는 상황에서 지면으로의 소음 전파를 고려하기 위해 하방 영역에 반구형 마이크로폰 어레이를 구성하였다. 해당 반구면에는 총 400개의 마이크로폰이 일정한 간격으로 배치되어 있으며, 이를 통해 전 공간에 걸친 소음의 방향성(directivity) 및 음압 수준을 분석할 수 있도록 하였다.
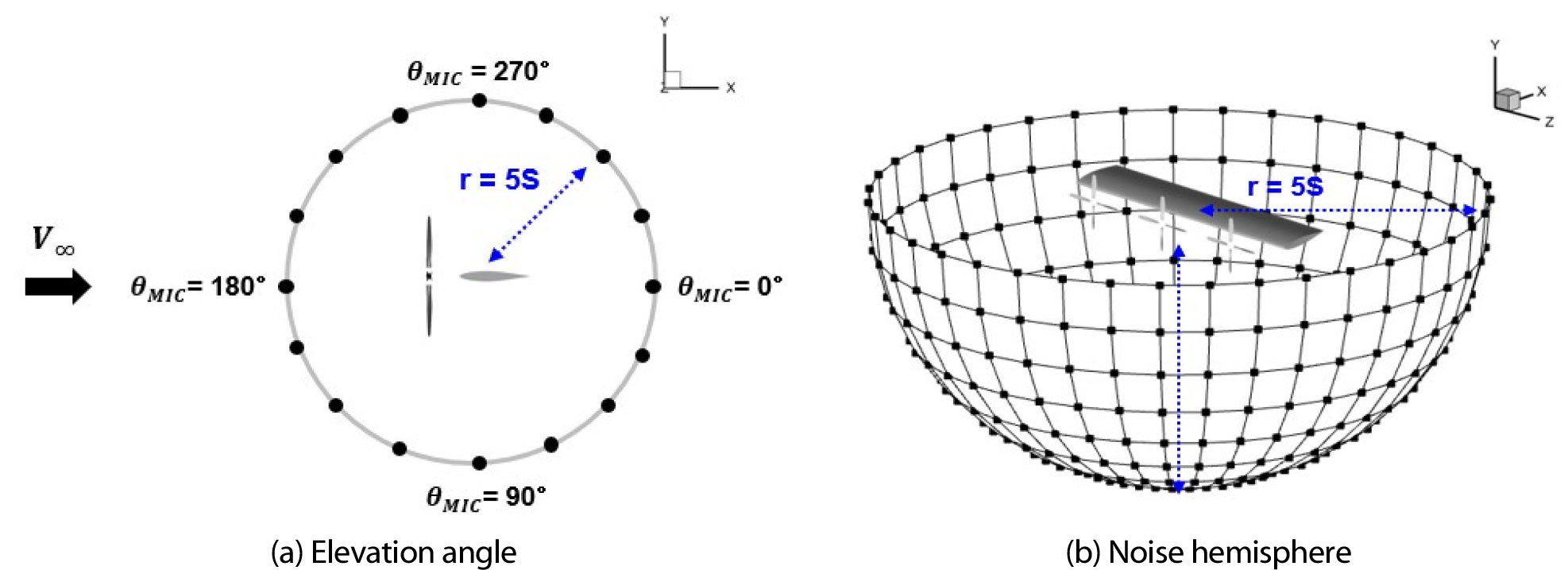
Fig. 11은 Fig. 10(a)에서 정의한 고도각(θ) 위치에서 측정된 Overall Sound Pressure Level(OASPL)을 비교한 결과로, 등가 단일 프로펠러 구성과 분산전기추진 시스템 구성 간의 소음 방사 특성과 방향성을 정량적으로 분석하였다. 또한, 분산전기추진 시스템 가운데 위치한 개별 프로펠러(P2)의 방사 소음도 함께 비교함으로써 다수 프로펠러의 영향 메커니즘을 상세히 고찰하였다. 등가 단일 프로펠러 구성은 전 고도각 범위에서 상대적으로 높은 소음 수준을 나타냈으며, 특히 전방 방향(θMIC = 180°)에서 최대 72.2 dB의 방사 소음이 발생하였다. 반면, 분산전기추진 시스템 구성에서는 동일 위치에서 70.2 dB로 약 2.0 dB의 저감 효과가 나타났다. 가장 큰 소음 차이는 하부 방향(θMIC = 90°)에서 관찰되었고 단일 프로펠러는 65.5 dB, 분산전기추진 구성은 61.4 dB로 총 4.1 dB의 감소가 나타났다. 앞서 설명한 것과 같이 본 연구에서는 등가 단일 프로펠러 구성과 분산전기추진 시스템이 동일한 추력 및 끝단 마하수 조건으로 설정하였다. 이와 같이 동일한 추력 및 끝단 속도 조건임에도 불구하고 등가 단일 프로펠러에 비해 분산전기추진 시스템은 전방 및 하부 방향에서 모두 낮은 소음 수준을 나타냈으며, 이는 프로펠러 구성 방식의 차이에 따라 방사 소음의 강도와 분포 특성이 달라졌음을 시사한다. 우선, 등가 단일 프로펠러는 반경이 크고 회전수가 낮기 때문에, 넓은 면적에서 높은 하중 분포를 지니며 블레이드 길이 방향 전체에 걸쳐 강한 압력 구배와 끝단 와류 구조가 형성된다. 반면 분산전기추진 시스템은 반경이 짧은 소형 프로펠러를 다수 운용함으로써 개별 블레이드의 하중이 분산되고, 여러 개의 소음원이 공간적으로 분산되며 발생한 소음이 서로 간섭 또는 상쇄되면서 전체적으로 저감된 OASPL 분포를 나타내게 된다. 또한 Fig. 11에 나타난 분산전기추진 시스템 내 개별 프로펠러(P2)의 OASPL 곡선을 보면, 등가 단일 프로펠러 대비 전 고도각 범위에서 일관되게 5~8 dB 낮은 수준의 소음을 방사하는 것이 확인된다. 이는 분산전기추진 시스템 내 각 프로펠러의 출력이 분산됨에 따라 소음 강도가 본질적으로 감소했음을 의미한다. 이처럼 분산전기추진 시스템 구성은 전체 소음 수준은 물론, 방사 방향에 따른 Peak 차이를 완화시켜 보다 저감된 소음 방사 특성을 나타낸다.
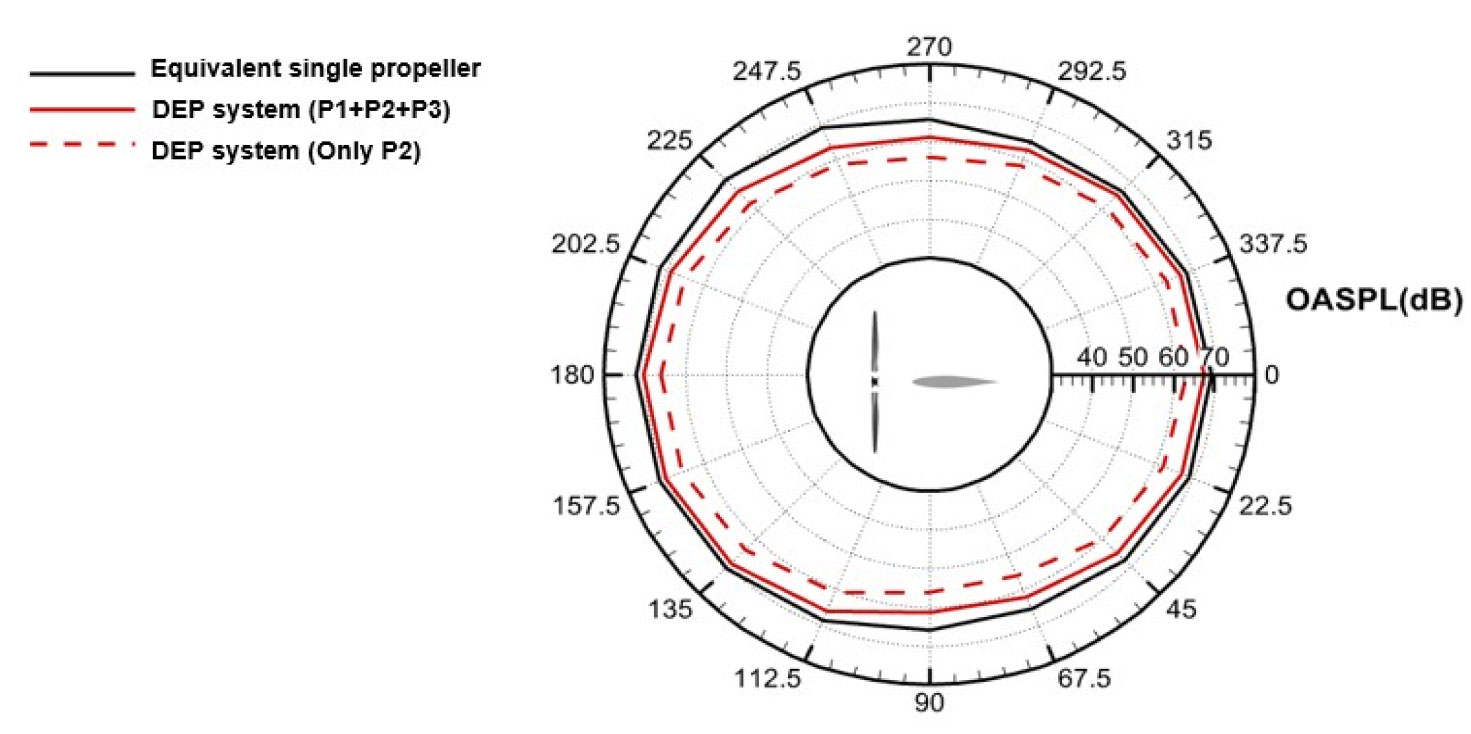
Fig. 12는 등가 단일 프로펠러 구성과 분산전기추진 시스템 구성 간의 압력 시간 미분 항(Time Derivative of Pressure)에 대한 분포를 비교한 결과이다. 소음의 주요 원인인 급격한 압력 변화 영역을 시각화함으로써, 각 구성에서의 음향 발생 위치 및 전파 방향성을 정성적으로 분석하고자 하였다. 특히, 분산전기추진 시스템의 경우 3개의 프로펠러 중 중앙에 위치한 P2 프로펠러의 회전 단면을 기준으로 비교를 수행하였다. 등가 단일 프로펠러 구성에서는 회전 중심축을 기준으로 상하 대칭적인 강한 압력 변화가 발생하며, 전방 및 후방 방향으로 뚜렷한 음향 파동들이 규칙적인 간격을 갖고 방사되는 양상이 나타난다. 이는 등가 단일 프로펠러에서 형성된 강한 팁 와류에 기인한 비정상 유동 현상으로 해석된다. 반면, 분산전기추진 시스템의 경우 유사한 파동 구조는 유지되지만, 압력 변화의 진폭은 전체적으로 감소한 양상을 보인다. 특히 상하 방향 및 후류 축 방향 모두에서 시간에 따른 압력 변화의 최대값이 낮게 분포하며, 압력 구배가 완만하고 불연속성이 적은 특성이 관찰된다. 이는 세 개의 프로펠러로 구성된 분산전기추진 시스템과 등가 단일 프로펠러 간은 동일한 추력 조건이지만, 분산전기추진 시스템을 구성하는 개별 프로펠러의 크기와 하중이 작아, 소음원의 강도가 감소했기 때문이다. 이러한 결과는 앞서 Fig. 11에서 나타난 OASPL 비교 결과와 정합성을 가지며, 분산전기추진 시스템이 전반적으로 낮은 소음 수준을 나타내는 주요 근거로 작용한다. 이와 같이 시간 미분 압력장 비교를 통해 분산전기추진 시스템의 저소음 특성을 정성적으로 확인하였다.
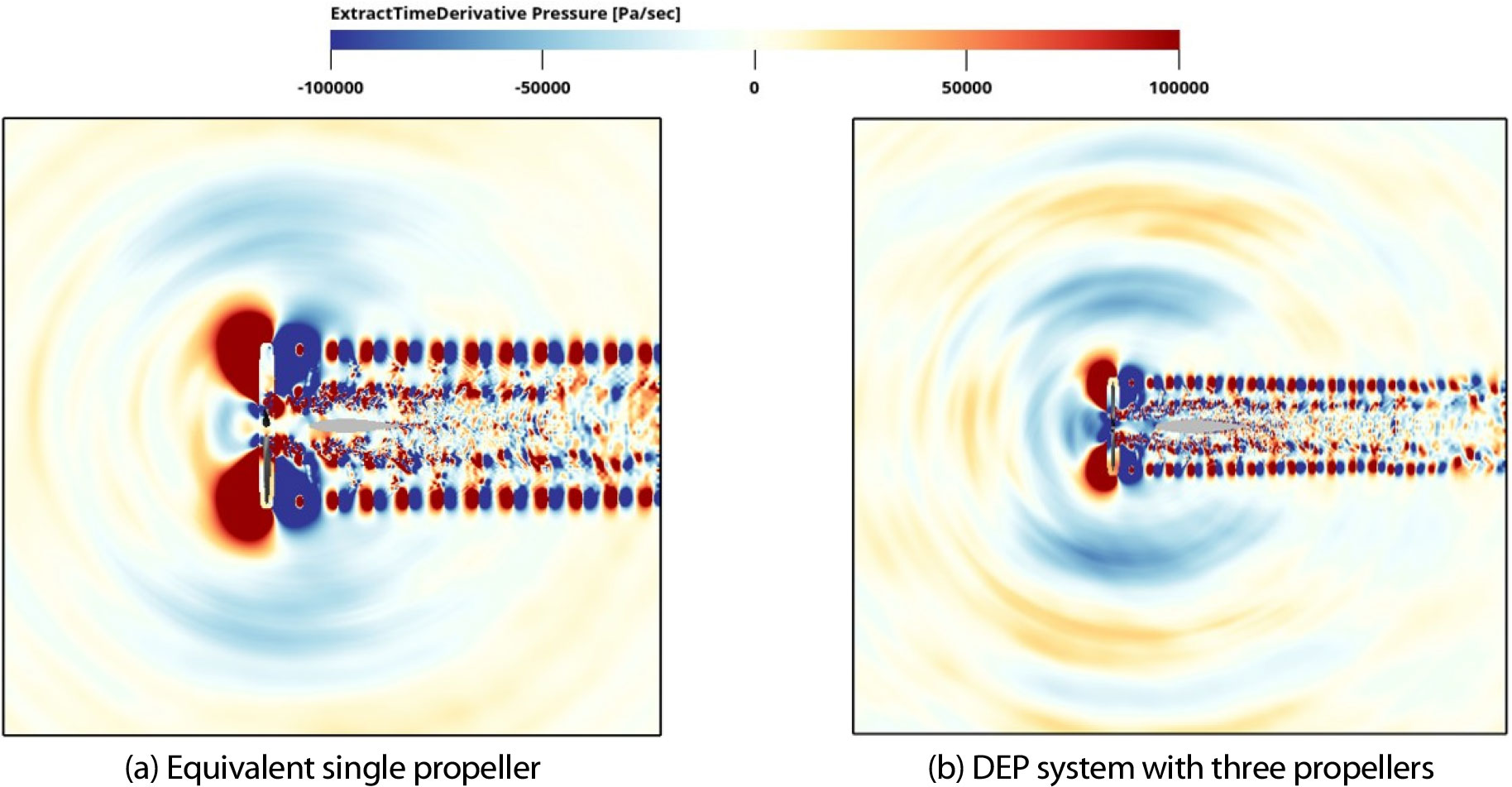
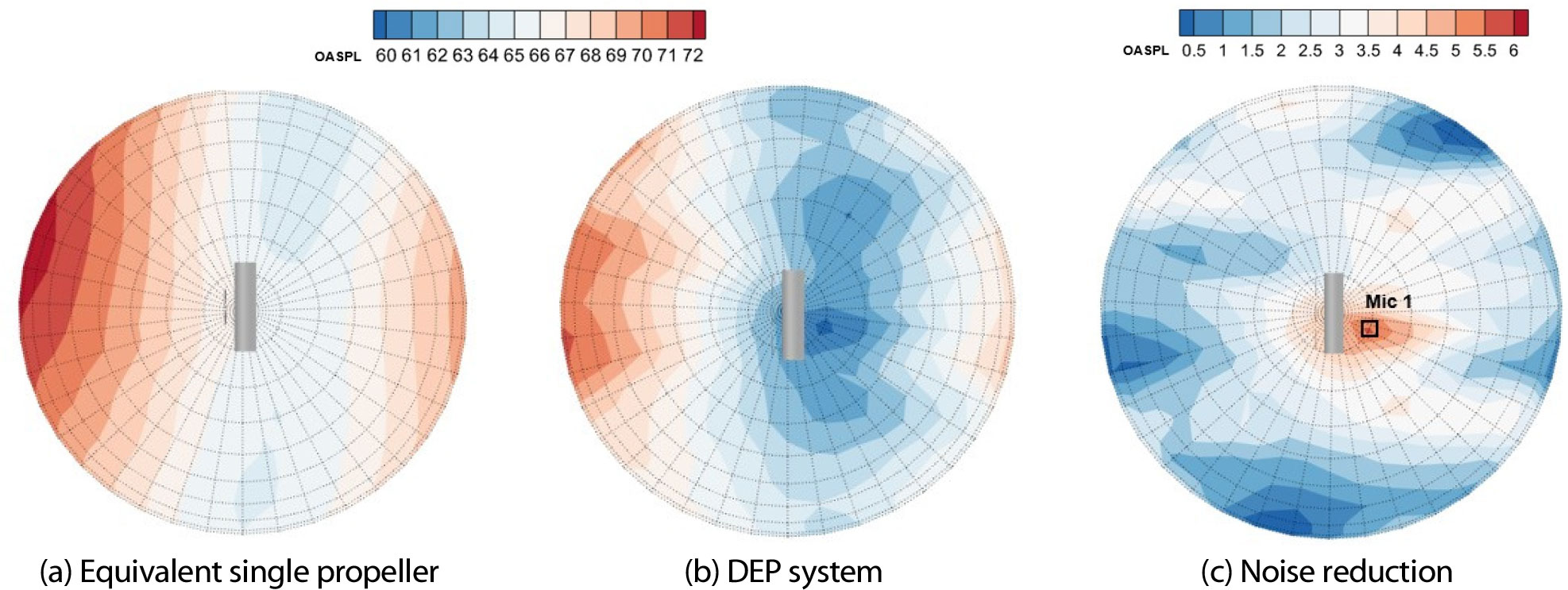
Fig. 13은 Fig. 10(b)에서 정의한 반구형 마이크로폰 어레이에서 예측된 전체 음압 레벨(OASPL)을 기반으로, 등가 단일 프로펠러 구성과 분산전기추진 시스템 구성 간의 소음 방사 방향성 차이를 비교한 결과이다. OASPL 값은 반지름 5 m 거리의 반구 표면상에 균일하게 배치된 총 400개의 수음점에서 계산되었으며, 이를 통해 각 구성에서 발생한 소음의 공간 분포 특성을 정량적으로 시각화하고 분산전기추진 시스템의 소음 저감 효과를 확인하였다. Fig. 13(a)는 등가 단일 프로펠러 구성에서의 OASPL 분포를 나타낸 것으로, 프로펠러 회전축 방향을 기준으로 전방 및 후방 영역으로 강한 방사 소음이 집중되는 명확한 지향성 특성이 관찰된다. 이는 프로펠러에 작용하는 비정상 하중에 의한 소음이 회전축 방향으로 전파되기 때문이며, 전후방 축을 따라 최대 72 dB에 이르는 고음압 영역이 형성되어 있다. 반면, Fig. 13(b)의 분산전기추진 시스템 구성에서는 전체적으로 OASPL 수준이 낮고, 특정 방향으로의 에너지 집중이 완화된 보다 분산된 방사 특성이 나타난다. 이는 개별 프로펠러의 출력이 상대적으로 낮고, 다수의 프로펠러에서 발생한 소음이 공간적으로 분산되어 방사되기 때문에 발생하는 현상이다. 물론 분산전기추진 시스템 구성에도 비정상 하중 소음 발생의 영향으로 다른 방향보다 상대적으로 회전축의 전방 및 후방 방향으로 소음이 강하게 전파되었지만, 그 세기가 등가 단일 프로펠러에 비해서는 현저히 감소하였다. Fig. 13(c)는 분산전기추진 시스템의 소음 저감 효과를 정량적으로 보여주기 위해, 등가 단일 프로펠러의 OASPL에서 분산전기추진 시스템의 OASPL을 뺀 값을 나타낸 것이다. Fig. 13(c)에서 Mic 1로 표시된 영역은 소음 저감 효과가 큰 지역으로, 최대 6 dB의 소음 저감 효과가 발생하였다. Mic 1 위치는 로터 회전면과 거의 나란한 방향에 놓여 있어 블레이드의 체적 변위가 가장 크게 인지되는 방향으로서, 두께 소음의 영향이 상대적으로 지배적인 위치이다. 등가 단일 프로펠러 대비 세 개의 소형 프로펠러로 구성된 DEP 시스템에서는 블레이드 크기와 두께의 감소로 인해 개별 로터에서 발생하는 두께 소음원의 강도가 상대적으로 감소하여 상대적으로 소음 저감 효과가 크게 관찰되었다. 또한 3개의 분산된 방사되는 음압 신호는 관측 지점까지의 전파 경로 차이로 인해 위상 간섭이 발생할 수 있으며, 이러한 부분적 상쇄 효과는 해당 관측 방향에서의 소음 저감량을 더욱 증가시키는 요인으로 작용할 수 있다. 이를 통해 분산전기추진 시스템은 단순히 평균 소음 수준을 저감시킬 뿐만 아니라, 특정 방향에서의 강한 소음 방사를 효과적으로 완화시킬 수 있음을 확인하였다.
6. 결 론
본 연구에서는 동일한 추력 조건을 만족하는 등가 단일 프로펠러 구성과 분산전기추진 시스템 구성을 비교 대상으로 하여 공력 및 소음 특성에 대한 전산해석을 수행하였다. LBM을 이용하여 프로펠러-날개 형상에 대한 공력 및 유동장 해석을 수행하였으며 이를 바탕으로 FW-H 음향상사법을 이용하여 소음 해석을 진행하였다.
등가 단일 프로펠러 구성에서는 날개 중심부에 강한 후류가 집중되어 국소적인 Suction Peak가 형성되는 반면, 분산전기추진 시스템 구성에서는 3개의 프로펠러 후류가 날개 스팬 길이 방향으로 주기적인 Suction Peak를 유도하며 압력 분포가 전반적으로 분산되어 나타났다. 이는 다수의 프로펠러 후류가 날개 전반에 걸쳐 유동을 가속시키면서 등가 단일 프로펠러 구성보다 평균 5~8% 높은 양력 계수가 나타났다. 하지만 항력 계수는 회전체 수 증가에 따른 날개의 표면 마찰 항력의 증가로 인해 분산전기추진 시스템 구성에서 상대적으로 높은 수치를 보였으며, 이에 따라 양항비(L/D)는 등가 단일 프로펠러 구성보다 평균 5% 낮게 나타났다. 소음 측면에서는 분산전기추진 시스템 구성이 등가 단일 프로펠러 구성 대비 모든 방사 방향에서 평균적으로 2~3 dB 낮은 소음 수준을 나타냈다. 특히 하부 방향인 θMIC = 90°에서는 최대 4.1 dB의 소음 저감 효과가 확인되었다. 이는 다수의 저출력 프로펠러에서 발생한 소음이 상호 간섭함에 따라 특정 방향으로 집중되지 않고 분산된 결과로 판단된다.
본 연구를 통해 동일한 추력 조건 하에 등가 단일 프로펠러 구성과 분산전기추진 시스템 구성 간의 공력 및 소음 특성 차이를 고찰하였다. 등가 단일 프로펠러 대비 다수의 프로펠러에서 형성된 후류는 날개 전반의 유동 구조에 영향을 미쳤으며, 그 결과 공기역학적 성능과 소음 방사 특성에 다른 경향이 나타났다. 분산전기추진 시스템은 항력 증가로 인한 공력 효율 저하와 그에 따른 총 요구 동력 증가라는 한계를 보였지만 동시에, 등가 단일 프로펠러 대비 평균적으로 2~3 dB의 소음 저감 효과를 달성했다. 따라서, 분산전기추진시스템의 동력 증가는 UAM의 핵심 성능인 저소음 성능을 확보하기 위한 상충 관계에 있는 설계 결과로 확인된다. 이러한 차이는 향후 항공기 설계에 있어 추진 시스템 구성 방식이 전체 유동 및 소음 특성에 영향을 미칠 수 있음을 보여주며, 저소음 · 고효율 운용에 요구되는 중요한 설계 인자로 고려될 수 있을 것으로 판단된다. 향후 연구에서는 프로펠러 간 간격, 위상차, 장착 위치와 같은 구성 변수들이 성능에 미치는 영향을 분석하며 소음에 미치는 영향 또한 추가적으로 분석할 예정이다.
