

1. 서 론
2. 2블레이드 및 4블레이드 리프트 프롭 공력 해석
2.1 2블레이드 및 4블레이드 리프트 프롭 형상
2.2 공력 수치 해석
3. 2블레이드 및 4블레이드 리프트 프롭 공력 해석 결과
3.1 제자리 비행 조건 리프트 프롭 공력 성능
3.2 전진 비행 조건 리프트 프롭 공력 진동
3.3 전진 비행 시 정지 상태의 리프트 프롭 항력
4. 결 론
1. 서 론
전기동력 수직이착륙(eVTOL) 기술 시연기 OPPAV(Optionally Piloted Personal Air Vehicle)는 2023년 개발 완료 후 그랜드 첼린지 사업, 인도네시아 비행 실증 등 국내외에서 UAM 활성화를 위한 다양한 비행 실증을 수행하고 있다.
OPPAV, Archer의 Midnight, Vertical Aerospace의 VX4와 같은 복합형 eVTOL의 경우 비행체 후방에 고정 피치의 회전수 제어로 운용되는 리프트 프롭을 장착하고 있으며, 리프트 프롭은 수직이착륙, 제자리 비행 , 제자리 비행에서 전진 비행으로 변경되는 천이 비행 시 필요한 양력 발생 뿐만 아니라 비행체 자세 유지를 위한 조정력 발생의 기능을 담당한다. 일반적으로 프롭(프로펠러 또는 로터)의 블레이드 개수는 공기역학적 성능 및 효율성 뿐만 아니라 소음과 진동 특성에도 영향을 미친다[1,2]. Lakhdhar 등[3]은 2~6개의 블레이드를 가지는 소형 프로펠러에 대하여 실험적 분석과 전산유체역학 방법을 사용하여 공기역학적 성능과 효율성을 비교하여 효율성과 추력 계수 간의 직접적인 상충 관계가 존재함을 확인하였다. Baskaran 등[4]은 2, 3, 5-블레이드 프로펠러 소음 측정 실험을 통해 2-블레이드 프로펠러가 높은 토널 소음(tonal noise)을 나타나는 반면, 5-블레이드 프로펠러는 높은 광대역 소음(broadband noise)이 높게 나타나는 것을 확인하였다. 대부분의 프로펠러에 대한 연구들은 데이터 접근의 용이성으로 인해 소형 드론에 적용되는 프로펠러에 국한되어 있으며, 공력 진동에 대한 연구는 상대적으로 부족한 실정이다.
OPPAV의 리프트 프롭은 프롭을 구동시키는 모터와 인버터가 장착되는 구조물인 파드(Pod)와 근접해 있으므로 프롭과 파드 간의 공기역학적 상호작용에 의해 프롭 블레이드와 파드의 표면 압력에 영향을 주게 된다. 프롭 블레이드는 회전 방위각에 따라 불균일한 공력 분포를 갖게 되며, 진동하는 공력 하중을 발생시키게 된다. 또한 파드의 표면 압력도 근접한 프롭의 내리흐름(downwash)에 의해 주기적인 변동성을 가지므로 파드도 진동하는 공력 하중을 발생시키게 된다 [5]. 특히 전진 비행의 경우 리프트 프롭의 블레이드로 유입되는 바람의 비대칭적인 상대속도로 인해 프롭 블레이드는 전진면과 후퇴면에서 불균일한 공력 분포를 갖게 되며 이는 공력 진동의 주요 원인으로 작용하게 된다. OPPAV 개발 과정에서 리프트 프롭은 초기 2-블레이드로 구성되었으나, 전진 비행 시 공기역학적 환경에 따른 진동 공력을 감소시키기 위해 4-블레이드로 변경되었다. 이러한 리프트 프롭의 블레이드 개수 변경은 Archer사의 Midnight eVTOL 개발 과정에서도 볼 수 있는데, 초기 프로토타입은 2-블레이드로 구성되었으나, 3-블레이드를 거쳐 최종적으로 4-블레이드로 구성된 리프트 프롭을 장착하여 인증 절차를 진행하고 있다[6].
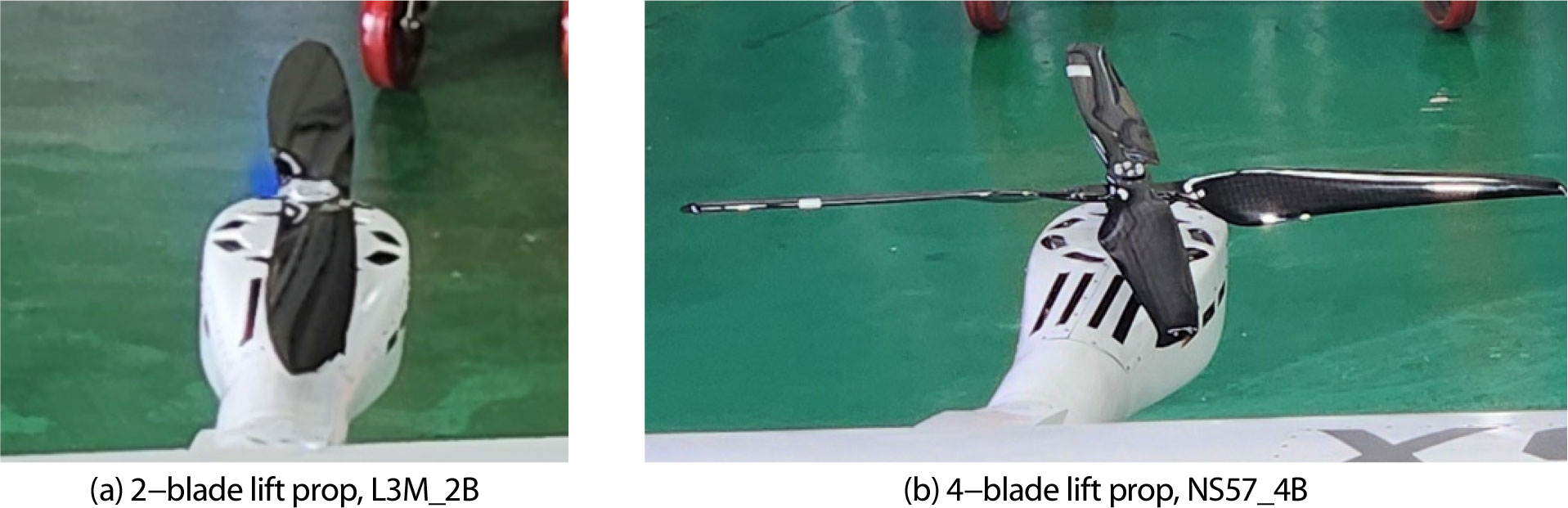
본 연구에서는 Fig. 1의 OPPAV 개발에서 적용된 2-블레이드 및 4-블레이드로 구성된 리프트 프롭에 대해 전산유체역학 방법으로 제자리 비행, 전진 비행시 진동 공력 및 프롭 정지 시 항력을 해석하여 비교하였다. 본 연구에서 비교한 두 리프트 프롭은 형상적 제원이 상이하나, 이는 OPPAV 개발 과정에서 초기 설계안인 2-블레이드 리프트 프롭과 진동 문제 해결을 위해 선정된 4-블레이드 리프트 프롭을 비교하기 위함이다. 두 프롭은 동일한 비행체의 추력 요구도를 만족한다는 측면에서 시스템 레벨의 비교 연구를 수행하였다.
2. 2블레이드 및 4블레이드 리프트 프롭 공력 해석
2.1 2블레이드 및 4블레이드 리프트 프롭 형상
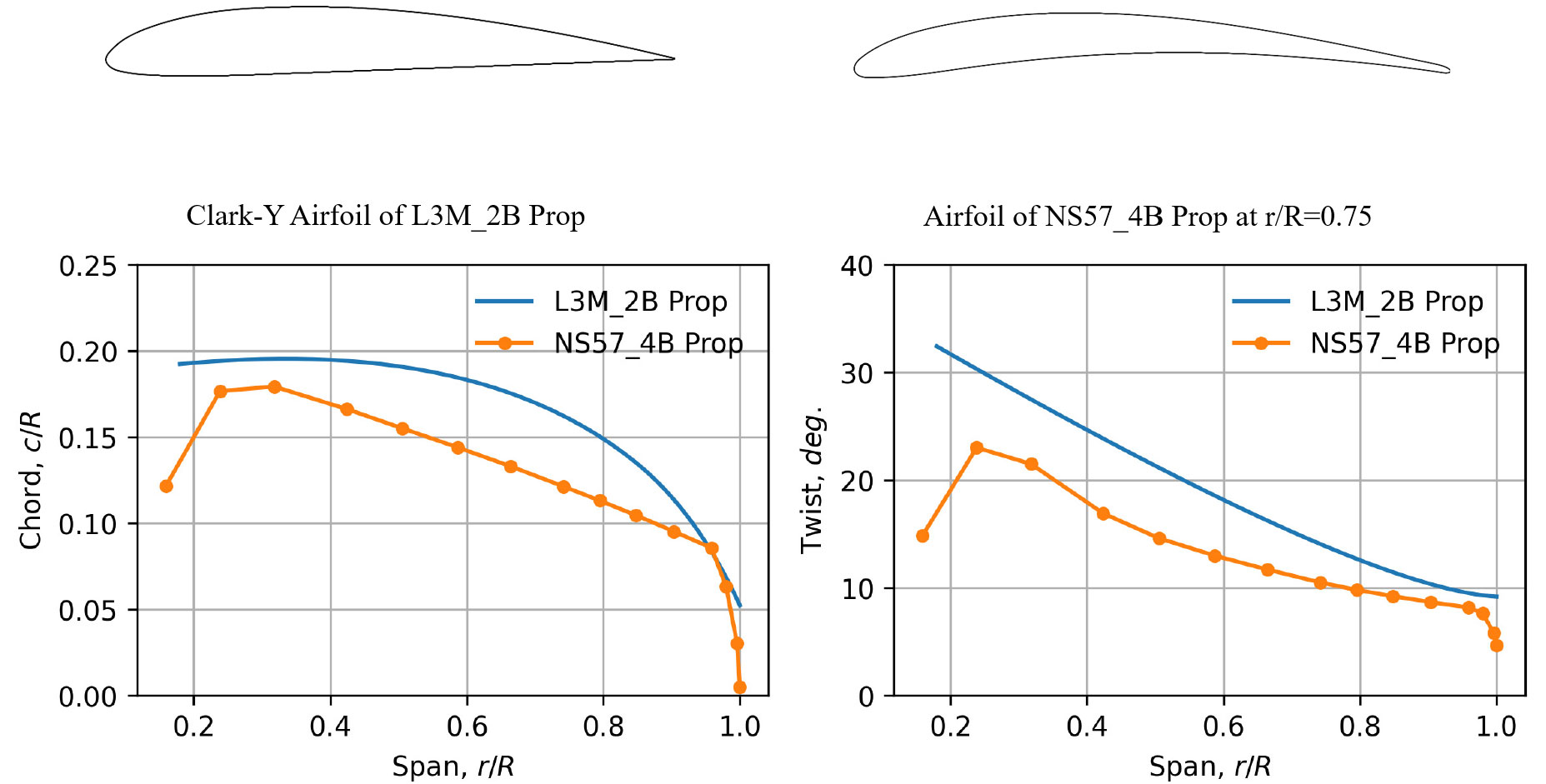
OPPAV에 적용된 2-블레이드 리프트 프롭(L3M_2B)은 프롭 공력 성능 최적화 설계를 통해 개발된 프롭이며, 반경 0.75 m으로 블레이드 단면은 Clark-Y 익형으로 블레이드 스팬 전 영역에 대해 적용되었다. 4-블레이드 리프트 프롭(NS57_4B)은 T-Motor 사의 NS 57x22 프롭으로 반경 0.7239 m, 블레이드 스팬 위치에 따라 다른 익형이 적용되었다. 2-블레이드 및 4-블레이드 리프트 프롭의 75% 스팬 위치에서 단면 익형 형상, 스팬에 따른 프롭 블레이드의 시위길이 분포 및 비틀림 각 분포는 Fig. 2와 같다. 4-블레이드 리프트 프롭의 익형이 2-블레이드 리프트 프롭에 적용된 Clark-Y 익형보다 고 캠버를 가지며 두께비(Thickness Ratio)는 작음을 확인할 수 있다. 2-블레이드 리프트 프롭의 시위 길이 및 비틀림 각은 비선형 분포를 가지며, 4-블레이드 리프트 프롭보다 큰 것을 확인할 수 있다. 프롭의 고형비(Solidity)는 2-블레이드 리프트 프롭의 경우 0.1061, 4-블레이드 리프트 프롭은 0.2399로 약 2배 정도 크다.
2.2 공력 수치 해석
리프트 프롭의 공력 해석은 OPPAV의 4개로 구성된 리프트 프롭 중 시계 방향으로 회전하는 하나의 리프트 프롭 형상에 대해 수행하였다.
2.2.1 공력 해석 형상 및 해석 조건
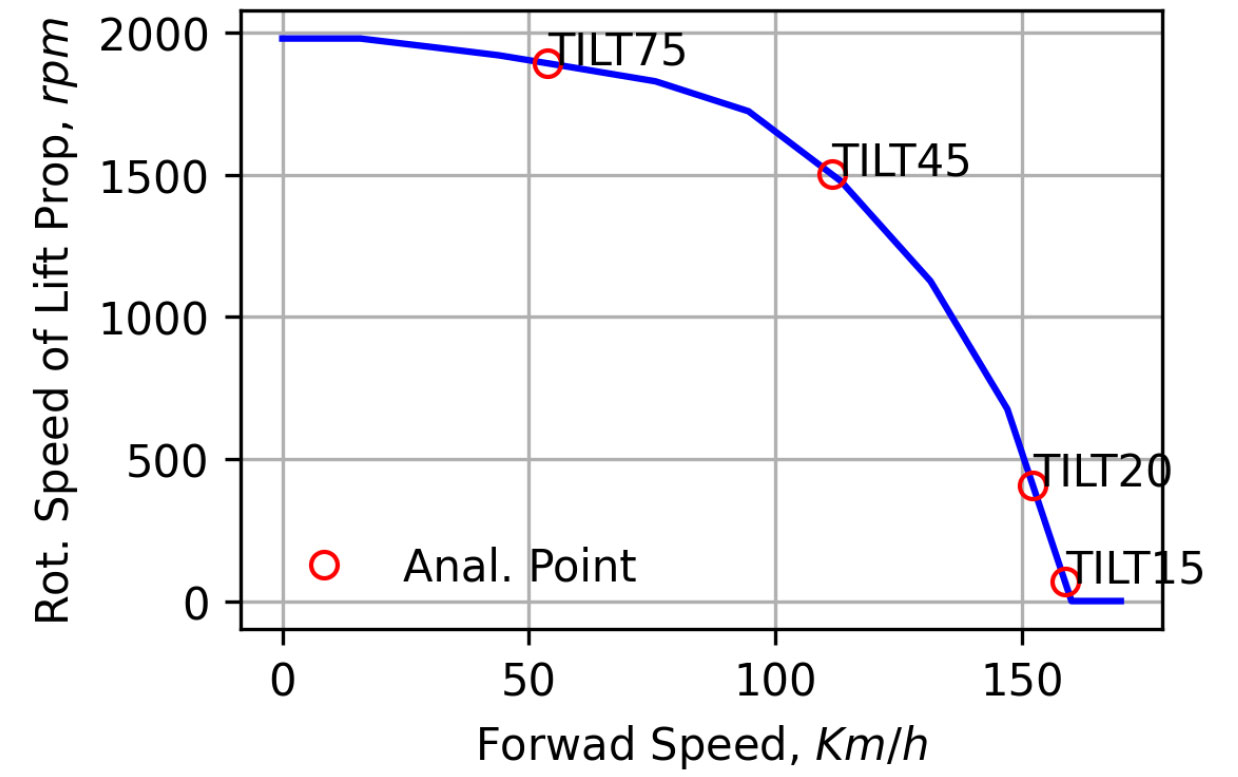
Fig. 3은 리프트 프롭의 제자리 비행 및 전진 비행 공력 해석 형상을 보여 준다. 리프트 프롭의 제자리 비행 해석은 단일 프롭에 대해 프롭 회전수 500~3,000 rpm에 따른 공력 성능 해석을 수행하였다. 전진 비행의 경우 해석 형상은 전방 파드, 후방 파드 및 리프트 프롭 블레이드로 구성되며, 파드 내부의 지지 구조물, 모터, 인버터를 포함한다. 비행체가 제자리 비행으로부터 전진 비행으로 변환되는 천이선도에 따라, 사전에 설정된 리프트 프롭의 비행체 속도에 따른 회전수 선도 중 4개의 전진 비행 해석 조건을 설정하였으며, 이는 각각 OPPAV의 날개 전방에 위치하고 있는 틸트 프롭의 틸트각 75, 45, 20, 15도에 해당한다. 각 해석 조건은 Table 1과 Fig. 4에 나타내었다. 전진 비행 시 2-블레이드 및 4-블레이드 리프트 프롭의 항력 비교를 위한 해석에서는 속도 200 km/h 조건에 대해 정지된 리프트 프롭의 블레이드 방위각 15도 간격으로 해석을 수행하였다. 모든 리프트 프롭의 공력 해석을 위한 환경 조건은 표준 대기 조건을 적용하였다.
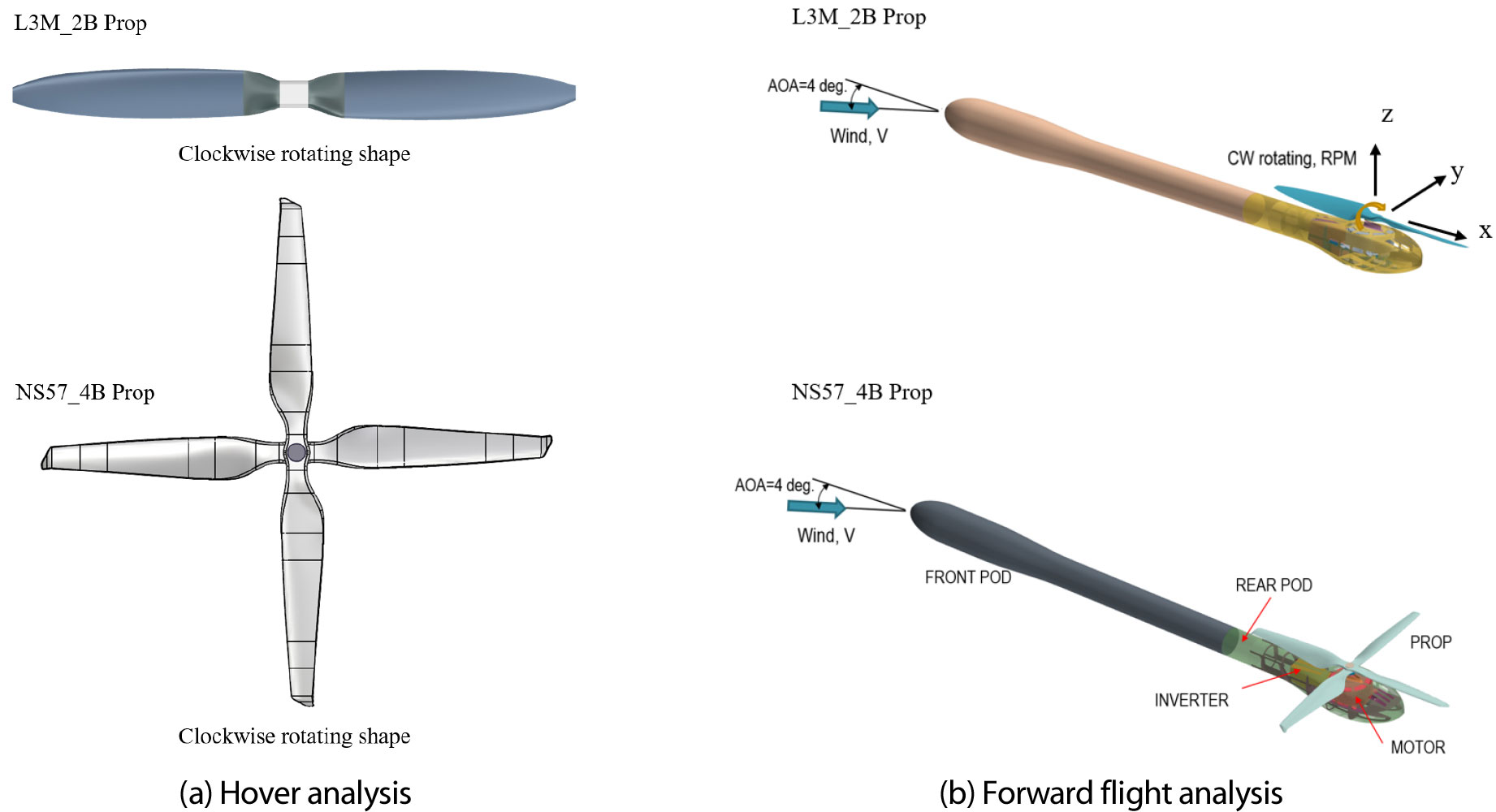
Table 1.
Analysis condition of the lift prop in forward flight
| Case | Velocity, km/h | Rotational speed, rpm |
| TILT75 | 53.8 | 1892.7 |
| TILT45 | 111.3 | 1502.2 |
| TILT20 | 152.2 | 405.3 |
| TILT15 | 158.7 | 67.5 |
2.2.2 수치 해석 기법
리프트 프롭 시스템의 공력 해석은 상용 전산유체역학 해석 프로그램인 STAR-CCM+[7]를 사용하여 3차원 정상/비정상 압축성 난류 유동 해석을 수행하였다. 난류 모델은 1-방정식 Spalart-Allmaras 모델을 사용하였으며, 비점성 플럭스 계산은 Roe’s FDS와 Venkatakrishnam limiter가 적용된 2차 Upwind 방법을 사용하였다. 본 연구에서 고려한 리프트 프롭의 제자리 비행 조건 시 최대 회전수는 3,000 rpm으로 끝단 마하수는 약 0.69에 해당하며, 전진 비행 조건 TIL75의 경우 전진면(Advancing Side)에서 끝단 마하수는 약 0.48이다. 따라서 압축성 유동 해석을 수행하였으며, 수치적 안정성을 확보하기 위해 Limiter를 적용하였다.
제자리 비행 해석은 MRF(Moving Reference Frame) 기법을 사용하여 회전좌표계에서 정상유동으로 해석을 수행하였으며, 전진 비행 해석은 Dual-time stepping이 적용된 2차 정확도의 내재적 시간 적분법을 적용하여 비정상 유동 해석을 수행하였다. 프롭 회전수에 대해 블레이드 방위각 1도에 해당하는 시간 간격을 사용하였다. 제자리 비행 해석의 원방 경계는 실린더 형상을 가지며, 경계면은 회전하는 프롭 위 방향으로 10R, 아래 방향으로 20R, 반경 방향으로 10R 지점에 존재한다. 원방 경계 조건은 고정된 압력과 유동의 방향에 따라 내부 격자로부터 내삽된 값 또는 고정값을 사용하여 나머지 유동 변수들이 계산되는 Pressure Outlet 경계조건을 적용하였다. 전진 비행 해석의 원방 경계는 육면체 블록이며, 경계면은 프롭의 회전 중심으로부터 전방으로 20R, 후방으로 24R, 위아래면 및 옆면으로는 15R에 위치 한다. 원방 경계 조건은 Riemann invariants에 기반한 특성치 경계 조건을 적용하였다.
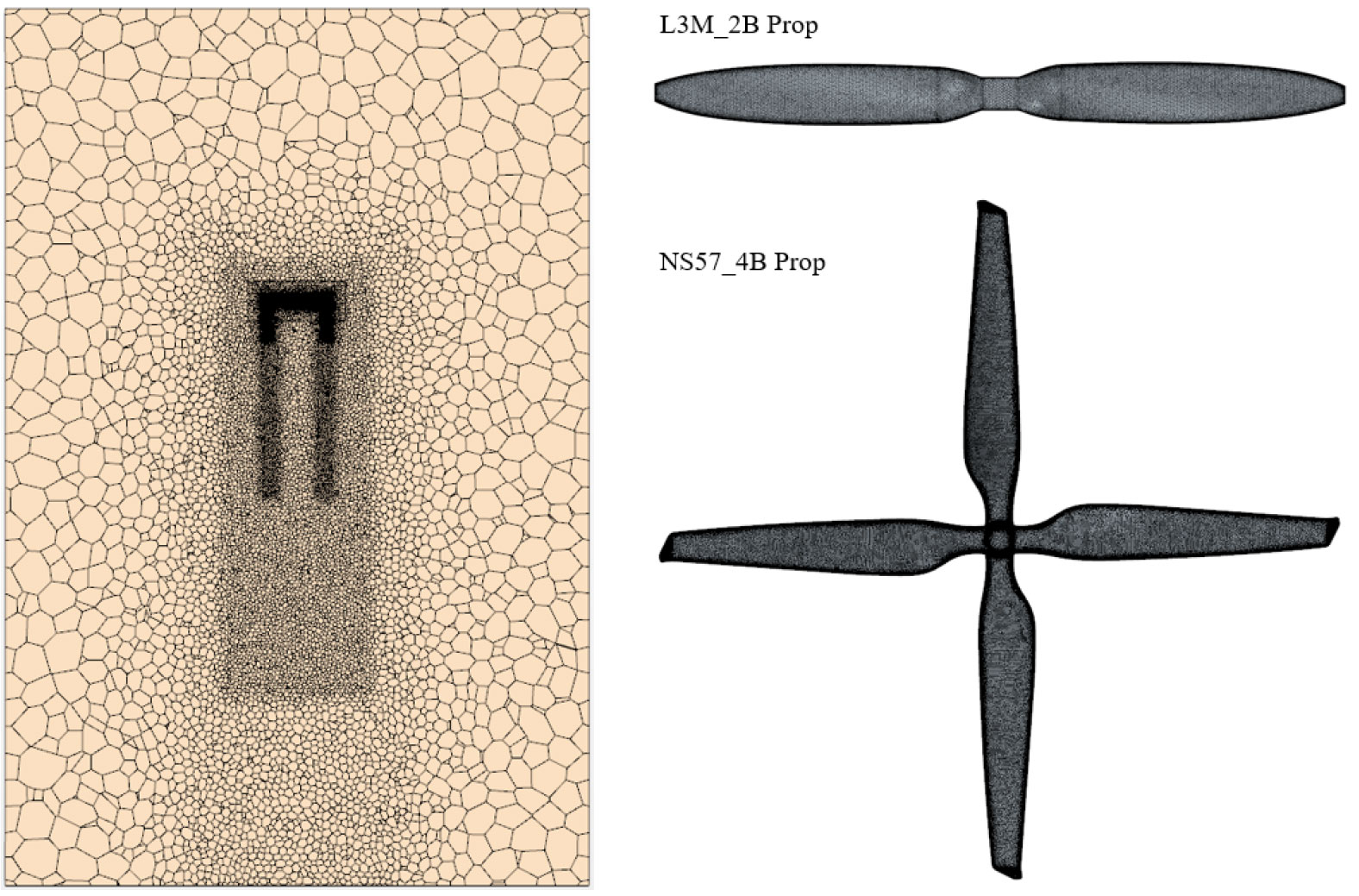
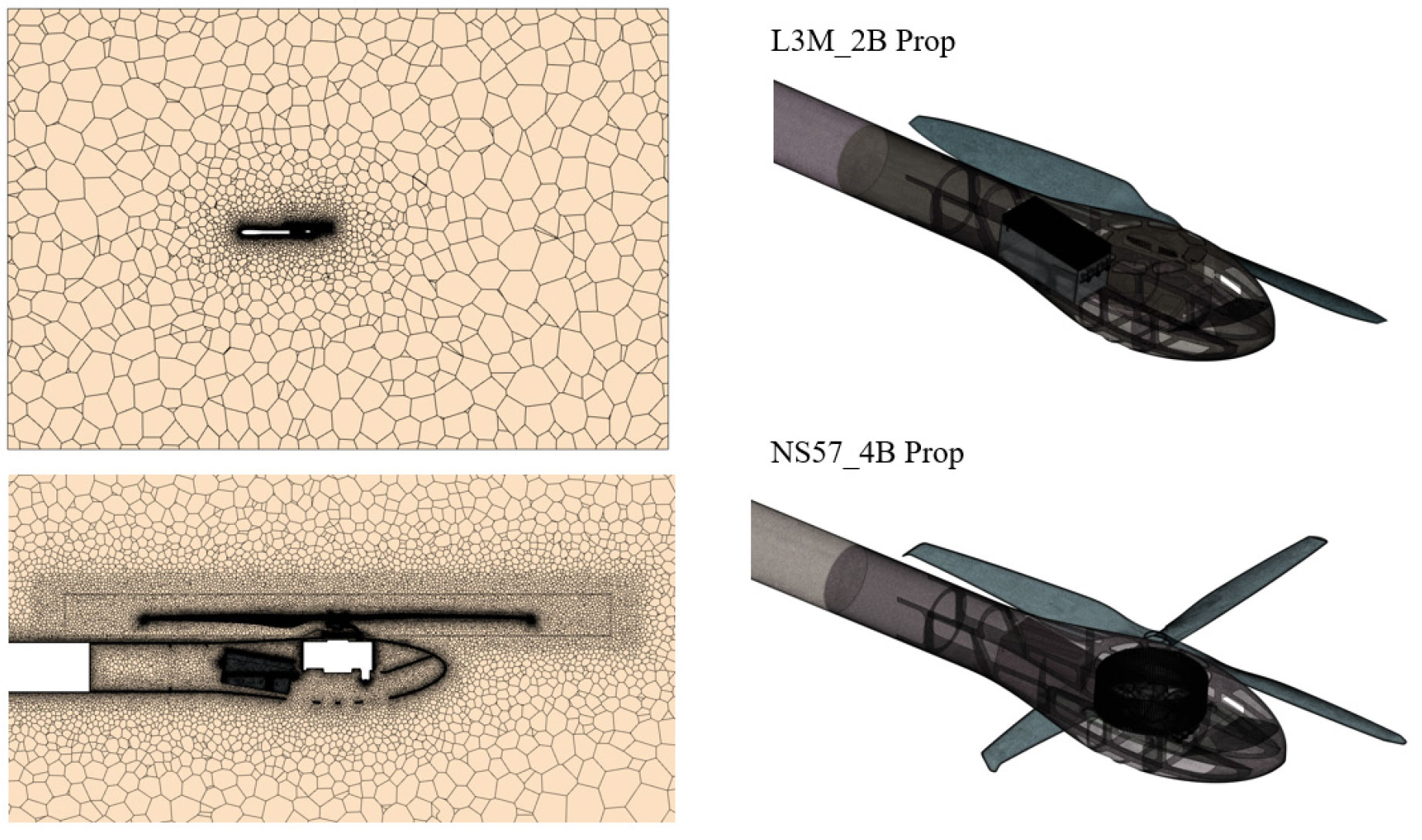
유동 해석을 위한 계산 영역의 격자계 구성은 다면체 격자(Polyhedral Mesh)를 사용하였으며, 전진 비행 해석의 경우 리프트 프롭 블레이드의 회전을 모사하기 위해 슬라이딩 격자(Sliding Mesh) 기법을 적용하였다. 점성 효과 해석을 위해 물체 표면에서는 25~30개의 층으로 이루어진 프리즘 격자계로 구성하였으며, 물체 표면에서 첫 번째 격자의 높이는 2 × 10-6으로써 y+1은 2 이하의 값을 가진다. Fig. 5는 제자리 비행 해석을 위한 계산 영역의 격자계와 2-블레이드 및 4-블레이드 리프트 프롭의 표면 격자를 보여 준다. 프롭 블레이드 부근과 블레이드 끝단 와류 및 후류 영역에 대해서는 격자를 조밀하게 구성하였으며, 약 1,000만개의 셀로 구성되었다. Fig. 6은 전진 비행 해석을 위한 격자계를 보여 준다. 슬라이딩 격자 기법이 적용됨에 따라 격자계가 회전 영역과 고정 영역으로 나누어져 있는 것을 확인 할 수 있으며, 프롭 아래의 파드 내부에 모터, 인버터 및 내부 지지 구조물에 대한 격자도 생성되어 있음을 확인할 수 있다. 회전 영역 격자계는 2-블레이드 리프트 프롭 해석에서는 약 700만개, 4-블레이드 리프트 프롭 해석에서는 약 1,700만개의 셀로 구성되어 있으며, 고정 영역 격자계는 두 경우 모두 약 2,900만개의 셀로 구성되어 있다.
3. 2블레이드 및 4블레이드 리프트 프롭 공력 해석 결과
3.1 제자리 비행 조건 리프트 프롭 공력 성능
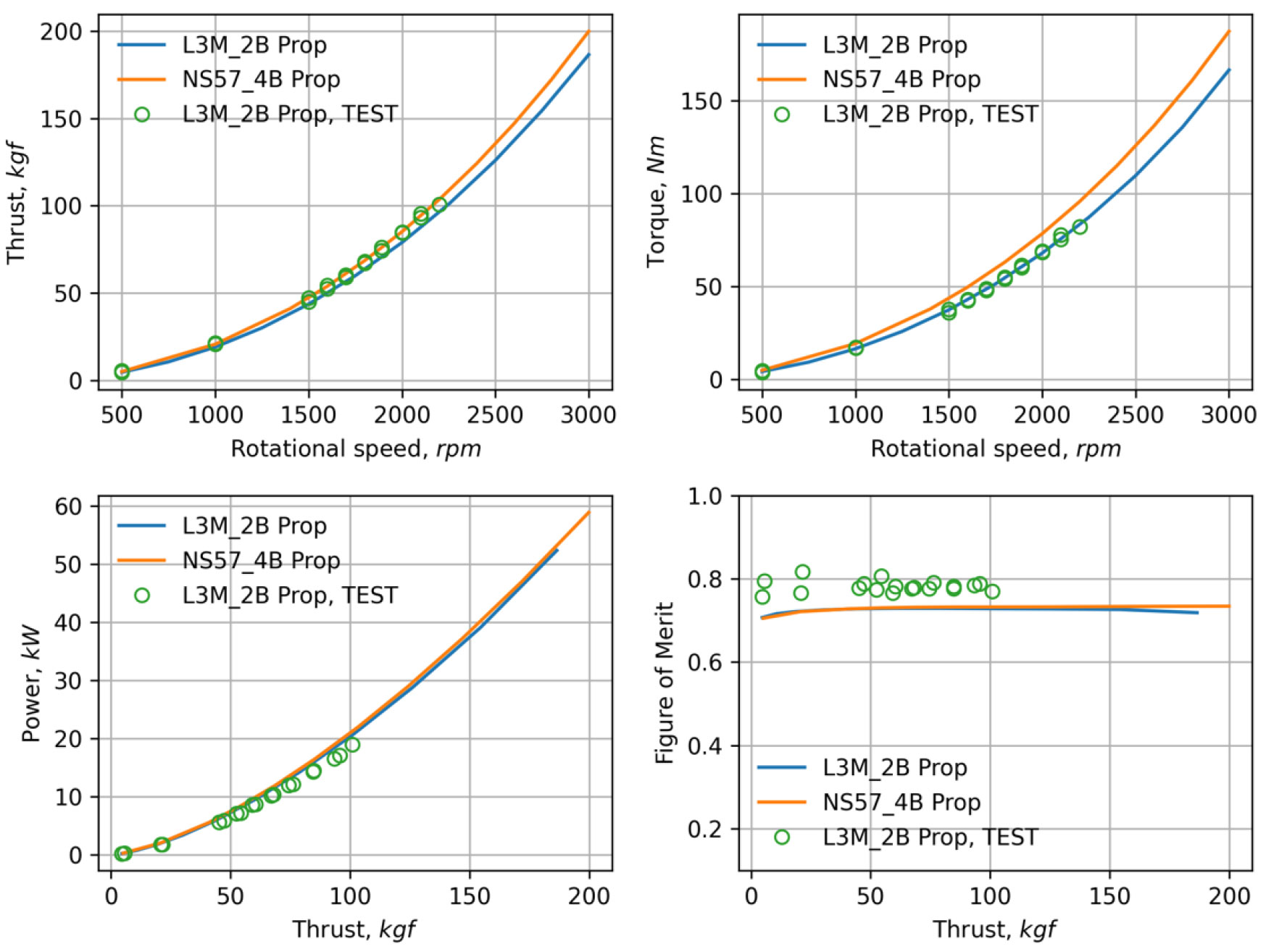
2-블레이드 및 4-블레이드 리프트 프롭의 제자리비행 조건에서의 공력 성능은 Fig. 7과 같다. 2-블레이드 프롭의 경우 시험 결과와 비교함으로써 해석 결과의 타당성을 확인하였다. 2-블레이드 프롭의추력은 해석결과가 시험결과보다 다소 작게 계산되었으나, 토크는 시험결과와 거의 동일하게 났으며, 이에 따라 프롭의 성능 효율도 해석결과는 시험 결과보다 다소 낮게 예측되었다. 프롭 회전수에 따른 전반적인 공력 특성 해석 결과는 시험 결과와 잘 일치함을 확인할 수 있다.
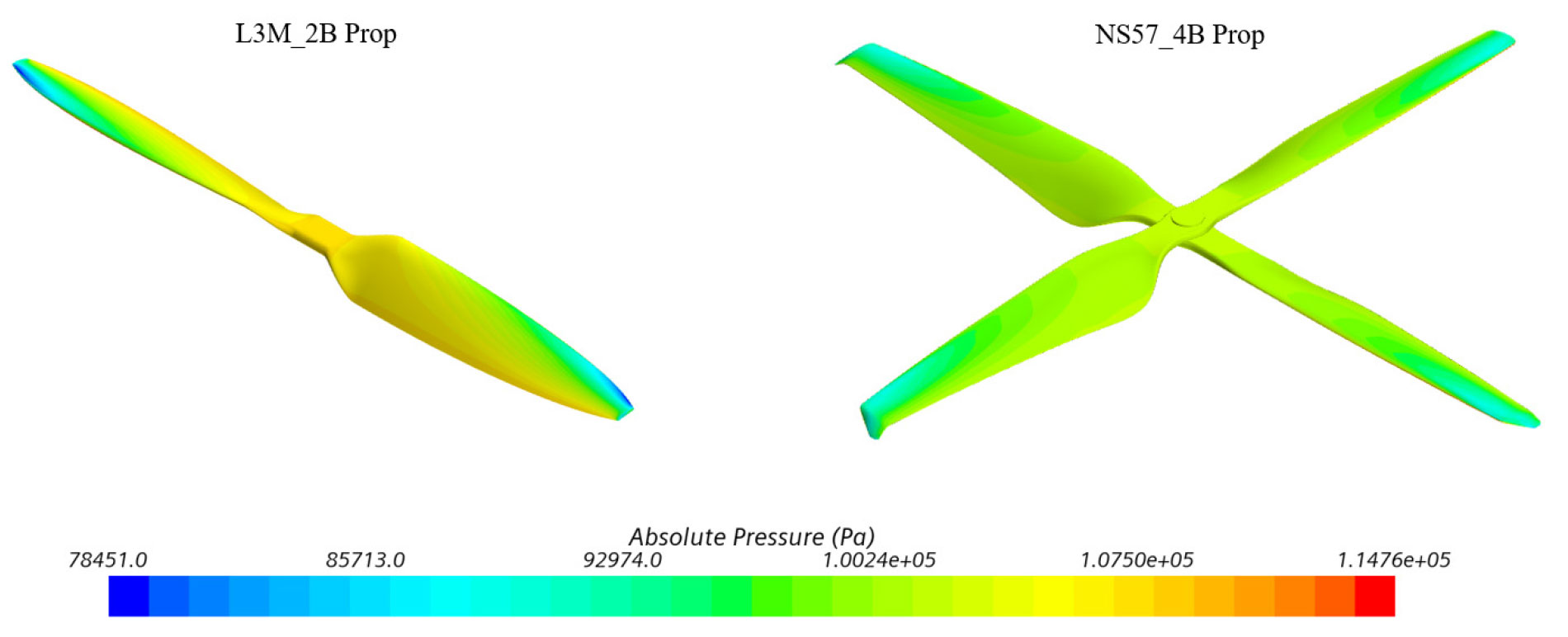
동일 회전수 조건에서 4-블레이드 리프트 프롭이 2-블레이드 리프트 프롭 보다 추력이 조금 크게 발생함을 확인할 수 있으며, 이에 따라 토크도 2-블레이드 리프트 프롭보다 크게 나타남을 확인할 수 있다[8]. 추력 대비 소요 동력 비교에서는 두 프롭이 거의 같음을 확인할 수 있으며 이에 따라 성능 효율도 고 추력 조건을 제외한 나머지 영역에서는 거의 같게 나타났다. 4-블레이드 리프트 프롭이 2-블레이드 리프트 프롭보다 높은 고형비를 가짐으로써 동일 추력에 대해 낮은 회전수를 나타냄을 확인할 수 있으며, 2-블레이드 리프트 프롭은 4-블레이드 리프트 프롭보다 프롭 반경이 크고, 큰 비틀림각 분포를 가짐으로 인해 Fig. 8과 같이 프롭 블레이드 표면 압력의 최대 및 최소값이 4-블레이드 리프트 프롭 보다 크게 나타남을 확인할 수 있다.
3.2 전진 비행 조건 리프트 프롭 공력 진동
2.2.1에 기술한 전진 비행 조건 4가지에 대해 리프트 프롭 공력 해석은 2-블레이드 리프트 프롭의 경우 20회전, 4-블레이드 리프트 프롭은 14회전에 대해 수행하였다. Fig. 9는 두 리프트 프롭의 마지막 3회전 동안의 리프트 프롭과 후방 파드의 공력 Fz 변화를 나타낸 것이다. 각 프롭은 블레이드 개수에 따라 2-블레이드 리프트 프롭의 경우에는 2/rev, 4-블레이드 리프트 프롭의 경우에는 4/rev의 공력 진동을 나타내고 있다.
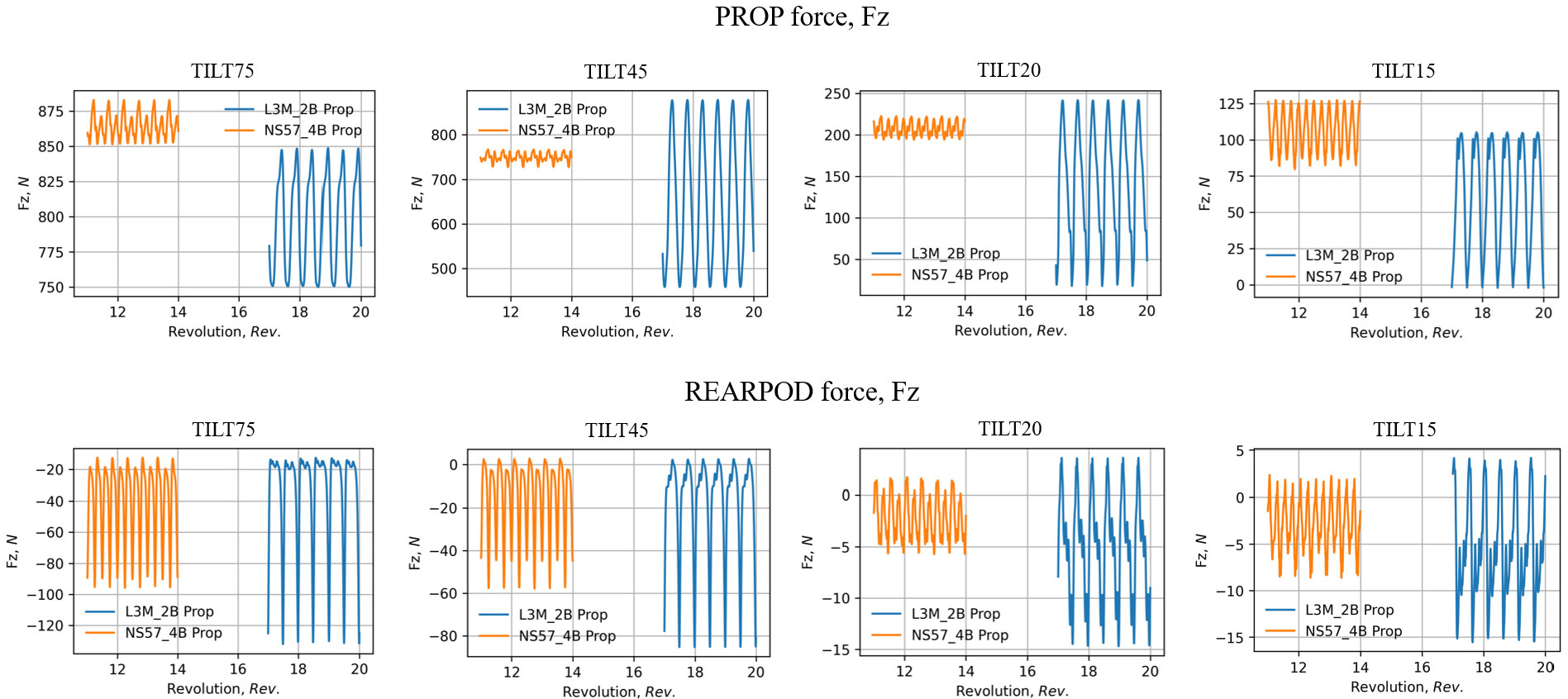
Fig. 10은 프롭 1회전 동안 프롭과 후방 파드의 공력 변화량, peak-to-peak 변화량을 나타낸 것이다. 프롭의 경우 z 방향의 공력 변화량, 즉 추력 방향의 변화량이 다른 성분 보다 크게 나타나고 있으며, 이는 전진 비행 속도에 의해 회전하는 프롭의 블레이드에 비대칭적인 유입류가 발생하고 주기적으로 변함에 따라 프롭의 추력이 크게 변하기 때문이다. 4-블레이드 리프트 프롭 진동 공력의 진폭은 2-블레이드 리프트 프롭보다 많이 감소함을 확인할 수 있다. 이러한 현상은 두 프롭이 생성하는 추력이 동일하다고 가정할 때 4-블레이드 리프트 프롭의 블레이드 한 개가 생성하는 추력은 2-블레이드 리프트 프롭 대비 블레이드 개수가 2배로 늘어난 만큼 약 1/2로 줄어들게 되며, 이에 따라 하나의 블레이드가 1회전 동안 생성하는 추력의 최댓값과 최솟값의 차이도 감소하게 되므로 리프트 프롭 진동 공력의 진폭은 감소하게 된다. 2-블레이드 리프트 프롭의 경우 전진속도가 증가하고, 프롭의 회전수가 줄어듦에 따라 감소하는 경향을 보이나, 4-블레이드 리프트 프롭의 경우에는 일정한 수준을 유지하는 것을 확인할 수 있다[9].
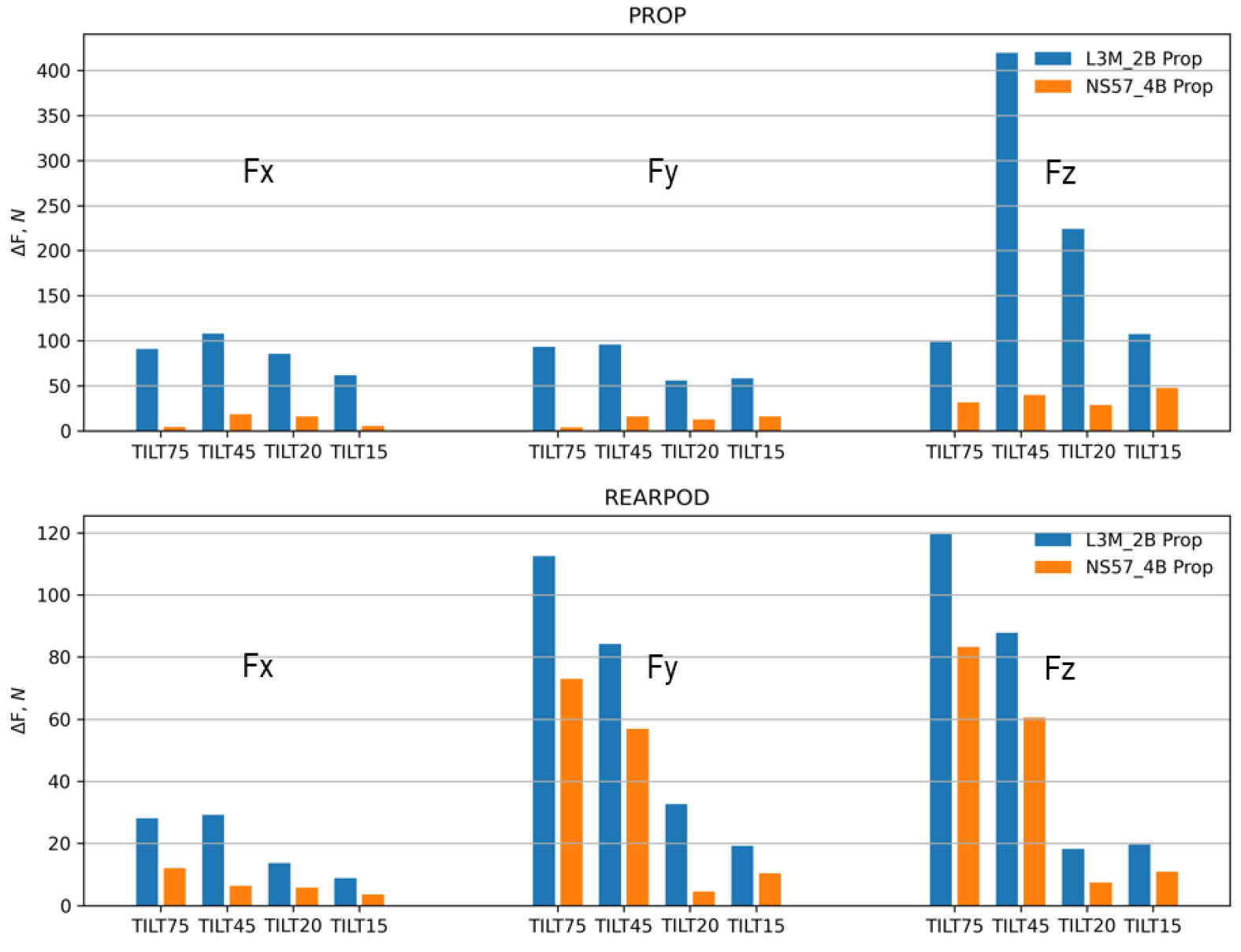
후방 파드의 경우 z 방향 뿐만아니라, y방향의 공력 진동도 나타난다. 프롭의 후류에 의한 영향 뿐만아니라 프롭의 블레이드가 파드 위를 지날 때마다 파드의 표면 압력과 프롭 블레이드 아랫면의 표면 압력이 변하는 프롭과 파드 간의 공기역학적 상호 작용이 주기적으로 발생함으로써 파드에서도 진동하는 공력이 나타나며, 프롭 블레이드가 회전하면서 파드에 근접하거나, 멀어짐에 따라 파드의 표면 압력 변화도 동반하게 되므로 파드의 y방향 공력 진동도 나타나게 된다. 두 프롭 모두 전진속도가 증가하고, 프롭의 회전수가 줄어듦에 따라 감소하는 경향을 보인다[8,9,10].
Fig. 11은 리프트 프롭의 프롭과 후방 파드의 진동하는 Fz 공력 성분에 대한 주파수 분석을 수행하여 나타낸 것이다. 2-블레이드 리프트 프롭의 경우 프롭 회전수에 따라 BPF(blade passing frequency)에 해당하는 2/rev 성분과 2/rev의 조화 주파수(harmonic frequency) 성분이 우세하게 나타나며, 4-블레이드 리프트 프롭의 경우 4/rev 성분과 4/rev의 조화 주파수 성분이 우세함을 확인할 수 있다. 조화 주파수 성분의 경우 고차로 갈수록 세기는 감소한다. 4-블레이드 리프트 프롭의 경우 세기는 작지만 2/rev 성분과 그 조화 주파수 성분도 나타나고 있는데, 이는 Fig. 3에서 볼 수 있듯이 4-블레이드 리프트 프롭은 프롭 형상 측면에서 2-블레이드로 구성된 프롭이 스택된 형태이므로 프롭의 블레이드 및 후방 파드의 공기역학적 환경 차이에 기인한다.
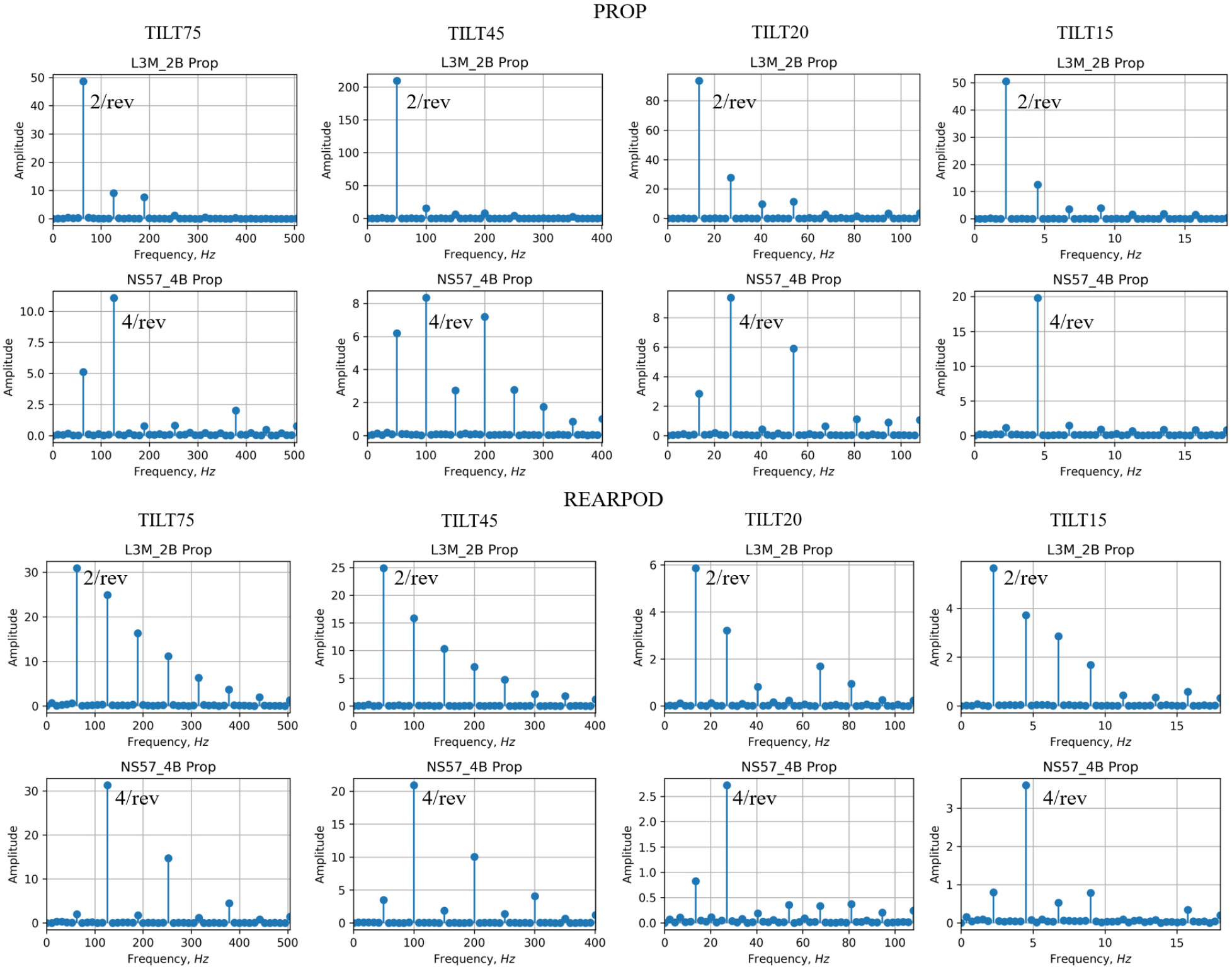
Fig. 12는 TILT45 해석 조건에 대해 리프트 프롭 단일 블레이드가 1회전 동안 발생하는 단면 추력 성분(Fz/dr)에 대해 등고선(contour)와 방위각 90도에서 360도까지 90도 간격으로 블레이드 스팬에 따른 단면 공력의 분포를 나타낸 것이다. 두 리프트 프롭의 형상 차이로 인해 단일 블레이드가 발생하는 단면 추력 크기의 차이는 있지만, 방위각 전 영역에서 전반적으로 비슷한 양상을 보이며, 두 리프트 프롭 모두 방위각 90도에서 135도 사이에서 최댓값을 나타내고 있다. 블레이드 스팬 방향으로 단면 추력 분포에서는 리프트 프롭 블레이드와 앞전 블레이드의 후류와의 상호 작용에 의해 일부 스팬 위치에서 단면 추력의 변화를 보인다.
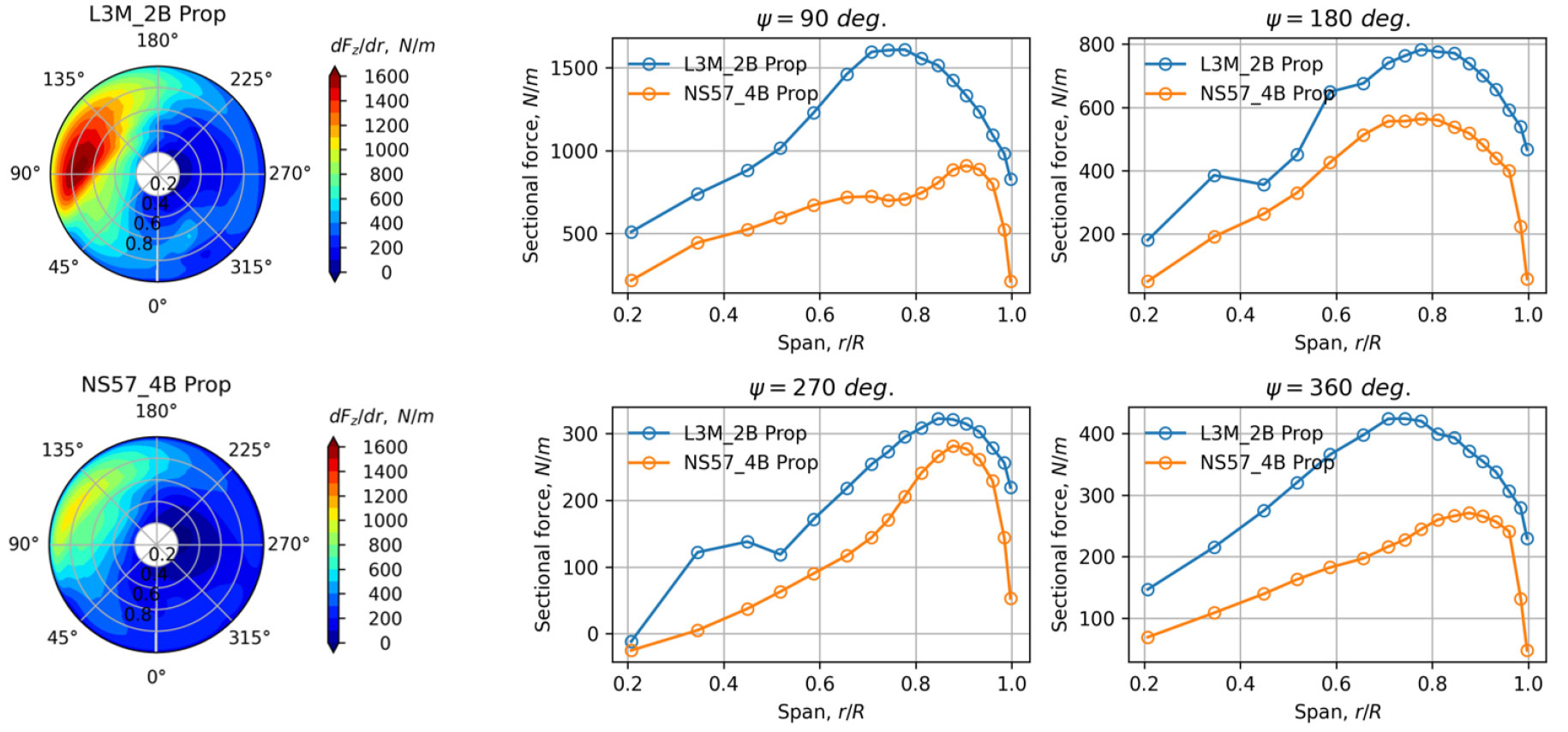
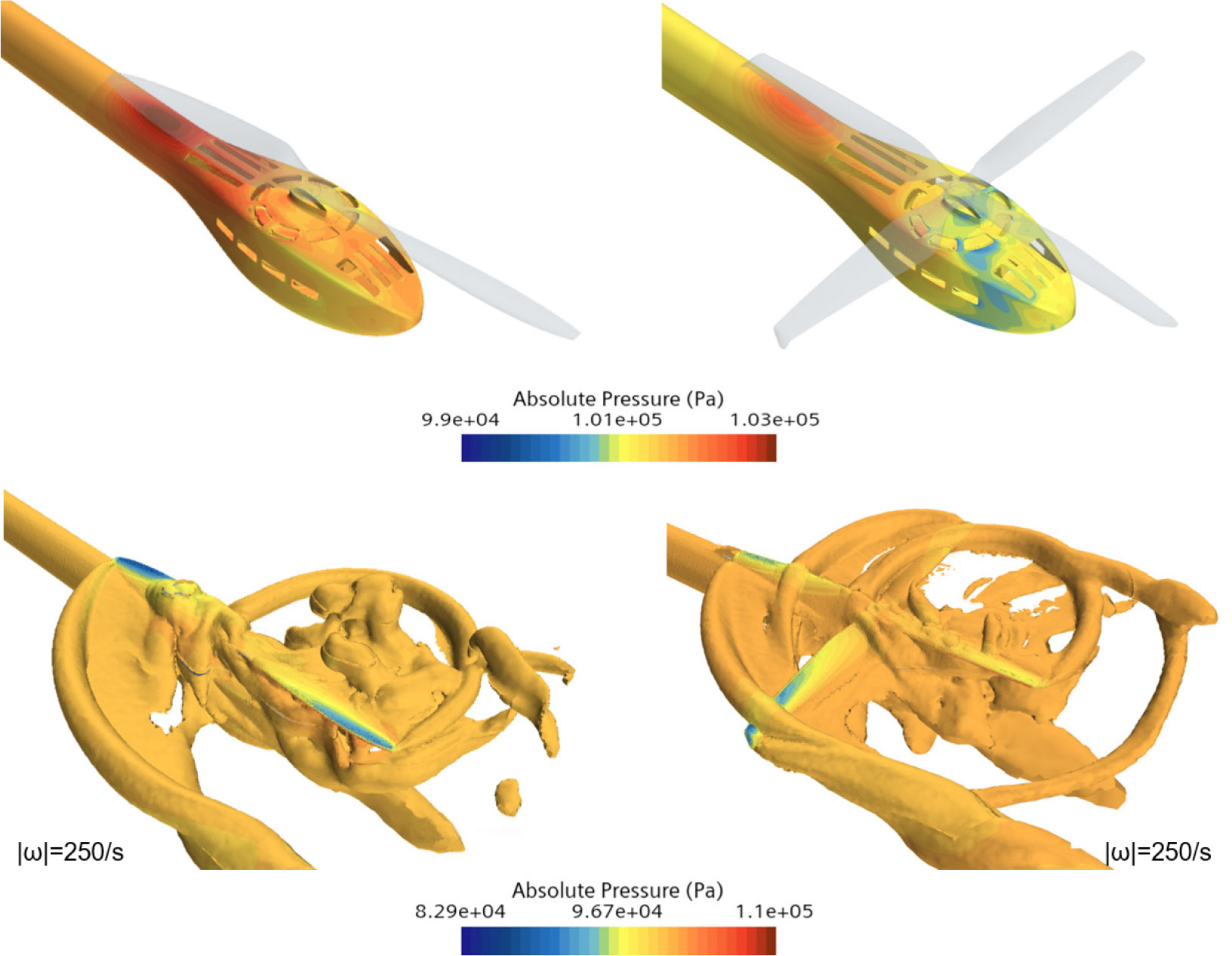
Fig. 13은 후방 파드의 표면 압력 분포, 리프트 프롭 블레이드 및 와류 강도 |ω|=250/s를 갖는 등와류 표면(Iso-vorticity surface)에서 압력 분포를 나타낸 것이다. 리프트 프롭의 블레이드가 후방 파드 위를 지나갈 때, 후방 파드 표면 압력의 경우 4-블레이드 리프트 프롭보다 2-블레이드 리프트 프롭의 경우 높은 표면 압력을 나타내고 있으며, 이러한 현상은 Fig. 10과 같이 후방 파드의 공력 진동이 4-블레이드 리프트 프롭보다 2-블레이드 리프트 프롭이 큰 원인이 된다. 등와류 형상에서는 리프트 프롭의 블레이드 개수에 따른 끝단 와류를 확인할 수 있다. 4-블레이드 리프트 프롭의 경우 선행하는 블레이드의 끝단 와류가 방위각 90도의 블레이드 스팬 r/R=0.8 지점, 방위각 180도의 스팬 r/R=0.5 지점, 방위각 270도에서는 스팬 r/R=0.8 지점을 통과하는 것을 볼 수 있으며, 2-블레이드 리프트 프롭의 경우에는 방위각 180도에서 선행하는 블레이드의 끝단 와류 및 후류가 블레이드 스팬 r/R=0.4~0.5 지점을 통과하면서 블레이드와 상호작용을 하는데, 이러한 현상은 Fig. 12의 블레이드 스팬에 따른 단면 추력 분포 변화를 통해 확인할 수 있다.
3.3 전진 비행 시 정지 상태의 리프트 프롭 항력
Fig. 14는 200 km/h의 고속 전진 비행 속도에서 정지 상태 리프트 프롭의 블레이드 방위각에 따른 공력을 비교한 것이다. 공력 성분 중 Fx는 프롭의 항력을 나타내며, Fz는 양력을 나타낸다. 블레이드 방위각 45도에서 135도까지는 2-블레이드 리프트 프롭의 항력이 4-블레이드 리프트 프롭의 항력보다 크게 나타나고 있으며, 그 외의 방위각에서는 반대되는 경향을 보인다. 2-블레이드 리프트 프롭은 방위각 0도와 115도에서 최소 항력과 최대 항력을 가지며, 4-블레이드 리프트 프롭은 방위각 45도와 0도에서 최소 및 최대 항력을 가진다.
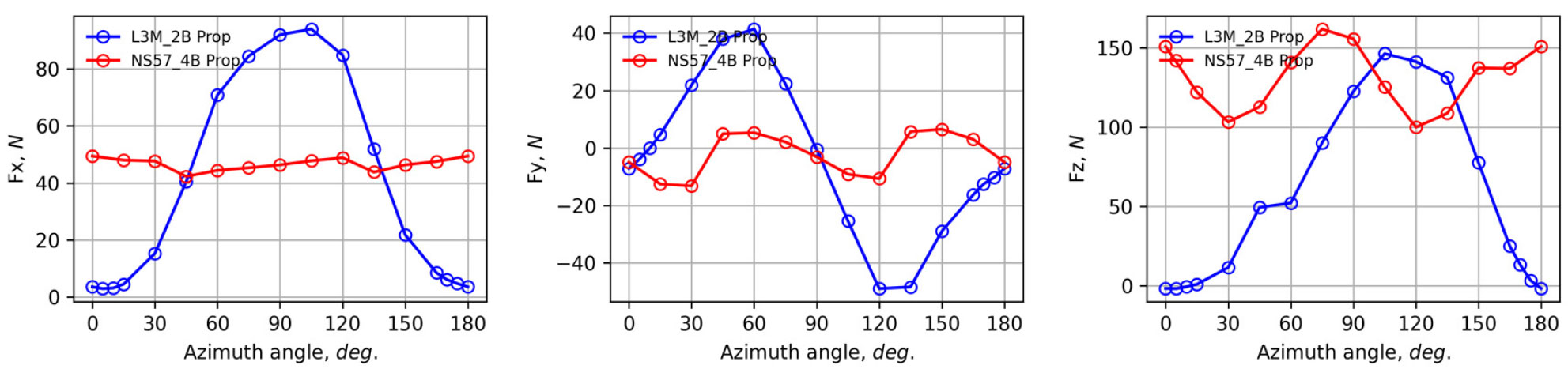
OPPAV 실기체의 전진 비행에서 외력이 작용하지 않는 상태에서는 2-블레이드 리프트 프롭은 방위각 90도, 4-블레이드 리프트 프롭은 방위각 0도 부근에서 정지하므로[11], 소요 동력 감소를 통해 비행체 성능 향상을 위해서는 모터 제어를 통해 리프트 프롭의 블레이드 방위각을 최소 항력을 갖는 방위각으로 조종할 필요가 있다[12].
최소 항력의 경우 2-블레이드 리프트 프롭이 4-블레이드 리프트 프롭 보다 작으므로 적절한 블레이드 방위각 제어를 통해 비행체 전체 항력 감소를 통한 성능 증대에는 유리한 점이 있으나, 앞 절의 전진 비행 속도에 따른 프롭의 공력 진동 비교에서와 같이 회전 시 비대칭 유입류에 의한 진동 유발 관점에서는 불리한 것으로 판단된다. 양력에 해당하는 Fz의 경우 정지 상태일지라도 블레이드 방위각에 따라 양력 변화를 보이고 있으며, 비행체 입장에서는 양력 발생의 이점이 있으나, 피칭 모멘트가 작용하므로 부가적인 비행체 자세 제어력이 필요할 것으로 판단된다.
4. 결 론
본 연구에서는 OPPAV eVTOL에 적용된 2-블레이드 및 4-블레이드 리프트 프롭의 공기역학적 특성을 제자리 비행, 전진 비행, 정지 상태에 대해 전산유체역학(CFD) 기법을 사용하여 비교 분석하였다.
제자리 비행 성능의 경우, 4-블레이드 리프트 프롭은 2-블레이드 리프트 프롭보다 고형비가 약 2배 높아 동일 추력을 더 낮은 회전수에서 달성하였으나, 추력 대비 소요 동력으로 계산된 성능 효율(Figure of Merit)은 두 프롭이 전반적으로 유사한 수준을 보였다. 전진 비행 조건(TILT75, 45, 20, 15)에서의 비정상 공력 해석 결과, OPPAV의 리프트 프롭을 2-블레이드에서 4-블레이드로 변경한 주된 이유인 공력 진동 저감 효과가 명확히 확인되었다. 4-블레이드 리프트 프롭은 2-블레이드 리프트 프롭 대비 프롭 자체의 추력 방향(Fz) 진동 공력 진폭(peak-to-peak)이 모든 비행 조건에서 크게 감소하였다. 이는 프롭의 총 추력이 4개의 블레이드로 분산되면서 개별 블레이드가 받는 비대칭적 공력 부하의 변동 폭이 줄어들었기 때문이다. 또한 프롭과 파드의 공기역학적 상호 작용에 의해 y, z 방향의 공력 진동도 확인할 수 있었다. 주파수 분석에서 2-블레이드 리프트 프롭은 2/rev , 4-블레이드 리프트 프롭은 4/rev 성분이 지배적으로 나타나, 블레이드 개수 증가가 진동 주파수 특성을 바꿈을 확인하였다.
고속 전진 비행(200 km/h) 중 프롭이 정지했을 때의 항력을 분석한 결과, 2-블레이드 리프트 프롭은 블레이드 방위각 0도에서 최소 항력을 보인 반면 , 4-블레이드 리프트 프롭은 45도에서 최소 항력을 보였다. 특히 2-블레이드 리프트 프롭의 최소 항력 값은 4-블레이드 리프트 프롭의 최소 항력 값보다 작았으며, 이는 회전 시 진동 관점에서는 4-블레이드 리프트 프롭이 유리하지만, 정지 시 항력 감소를 통한 비행체 성능 향상 관점에서는 2-블레이드 리프트 프롭이 유리할 수 있음을 시사한다.
