

1. 서 론
2. 본 론
2.1 유동 해석 개요
2.2 Baseline 형상 정의
2.3 격자 민감도 조사 및 정상 상태 유동해석
2.4 비정상 유동해석
2.5 Guide 형상 정의
2.6 Guide 형상 LES 해석 결과
3. 결 론
1. 서 론
최근 현대전에 기동부대의 기동속도 및 공격기세 유지의 중요성이 강조되면서 전투 장비의 기동을 저해하는 대전차지뢰 등 방어진지 상 장애물을 제거하는 지뢰제거체계 개발의 필요성이 대두되었다. 현용 지뢰제거체계인 미클릭(MICLIC)은 첨두부의 로켓에 연결된 선형장약을 사용하여 직선 상의 지뢰지대를 개척하는 장비로서, 한반도 산악지형의 수목 지역에서 일부 운용이 제한되었다. 이러한 문제를 해결하기 위해 ㈜한화에어로스페이스가 국방기술진흥연구소의 지원을 받아 개발 중인 로켓발사식 지뢰제거탄은 장갑차 등 공병 차량에 장착하여 운용할 수 있으며 현존하는 대부분의 지뢰지대 개척·돌파할 수 있다.
Fig. 1에서의 운용개념과 같이 로켓발사식 지뢰제거탄은 비유도 발사체이므로 정확한 원형공산오차(CEP: Circular Error Probability) 형성을 위해 정적/비정적 안정성이 매우 중요하지만, 발사관을 이용해야 하는 형상 특성과 고각의 발사로 인한 이상진동 현상 때문에 CEP 증가 가능성이 부각되었다. 이러한 발사식 지뢰제거탄은 비행 과정에서 비대칭 와류(Asymmetric Vortex) 현상이 발생하여 탄의 비행 안정성과 명중률이 저하되는 문제가 보고되고 있다[1,3]. 비대칭 와류는 발사 초기 조건의 편차, 형상 비대칭성 등 복합적 요인으로 인해 발생할 수 있으며, 이로 인해 탄의 안정성이 크게 저하될 수 있다[2,4].
기존 연구는 비대칭 와류 현상의 존재를 확인하거나 단순한 준 정상 해석에 머물렀고, 현상 발생 원인 규명과 완화 방안 도출을 위한 체계적인 연구는 부족하다[1,3]. 비대칭 와류 현상은 본질적으로 비정상 유동 현상에 기인하므로, 정상 RANS(Reynolds-Averaged Navier-Stokes) 해석만으로는 정확한 분석이 어렵다. 이에 본 연구는 전산유체역학(CFD) 기법을 활용하여 비대칭 와류 현상의 발생 메커니즘을 규명하고, URANS(Unsteady Reynolds -Averaged Navier-Stokes)와 LES(Large Eddy Simulation) 해석을 비교하여 정확성을 확인 후, 최종적으로 LES 해석을 통해 비정상 유동 특성을 정량적으로 비교하였고, 나아가 유동을 제어할 방법을 모색하여 로켓발사식 지뢰제거탄이 정확한 원형공산오차를 형성할 수 있도록 형상설계를 목표로 하였다.
2. 본 론
2.1 유동 해석 개요
본 연구에서 먼저 Baseline 형상에 대해 격자 수렴성 검증을 수행하여 수치적 신뢰성을 확보하였다. 격자는 Coarse–Medium–Fine 3수준으로 생성하여 평균 공력계수 변화율과 풍동시험 데이터 결과와 비교하였다. 난류모델은 k-ω SST를 기반으로 하였으며, 정상 해석과 비정상 해석을 결과를 비교하였다[5]. 비정상 해석 시 URANS는 시간에 따른 평균 흐름을 모사하여 주기적 변동과 표준편차(Standard Deviation)를 평가할 수 있으며, LES는 대규모 와류를 직접 계산하여 후류 비대칭성과 광대역 주파수(Broadband) 특성을 더욱 정확히 재현할 수 있다[3,6]. 본 연구의 유동해석은 상용의 CFD 해석 코드인 ANSYS FLUENT V2024 R2를 사용하였다[7].
2.2 Baseline 형상 정의
Fig. 2는 로켓발사식 지뢰제거탄의 Baseline 형상이다. 발사 초기 발사관으로부터 발사되기 때문에 발사관의 직경에 의해 발사체의 지름이 제한되었다. 그리고 앞부분의 연장 봉은 지면과의 충격을 감지하는 센서와 뇌관 역할을 한다. 무유도로 발사되는 발사체 특징상 정 안정성(Static Stability)을 확보하기 위한 무게중심 배치 및 꼬리날개를 선정하였고, 특히 발사체 앞부분의 형상 역시 저 받음각(Angle of Attack) 비행 시 안정성을 고려하여 형상을 선정하였다. 하지만 곡률이 작은 발사체의 앞면을 지나 몸체의 옆부분(Shoulder)이 시작되는 지점의 큰 곡률에 의한 비대칭 와류 현상을 풍동시험 시 확인하였다.

2.3 격자 민감도 조사 및 정상 상태 유동해석
본격적인 해석을 수행하기 전 격자의 밀도에 따른 해석의 정확성을 확인하기 위해 격자에 의한 해의 민감도를 확인하였다. 3종의 격자 Coarse-Medium-Fine mesh를 생성하여 격자의 밀도 변화에 따른 수직력 계수 , 피칭모멘트계수 , 축력계수 값을 각각 비교하였다. 아래의 Fig. 3에 구성된 격자를 비교하였다.

로켓발사식 지뢰제거탄은 아음속으로 비행을 하지만 계산의 정확성을 위해 Pressure-based의 Coupled 알고리즘을 적용하였다. Pressure-Based Solver에서 사용되는 Coupled 알고리즘은 연속 방정식과 운동량 방정식을 동시에 계산하여 압력–속도 간의 강한 결합(Strong Coupling)을 구현하는 방식이다. 이러한 접근법은 압축성 유동이나 고속 비정상 유동의 경우 계산의 안정성과 정확도를 높이는 장점이 있다. 특히, Coupled 기법은 밀도 변화나 압력 구배가 큰 조건에서 SIMPLE 알고리즘 대비 더 빠른 수렴성을 확보할 수 있는 것으로 알려져 있다[5,6]. 따라서 엄밀한 의미에서 비대칭 요와 같이 비정상적이고 3차원성이 강한 유동 현상을 재현하기 위해서는 Coupled 알고리즘을 사용하는 것이 바람직하다. 그러나 정상 해석 시 비정상적인 진동이 발생하여 계산이 안정적으로 수렴하지 않았다. 이에 따라 안정적인 수렴 특성을 보이는 SIMPLE 알고리즘을 사용하여 격자의 밀도에 따른 수치해석 결과를 비교 분석하였고 이후 비정상 해석 시 Coupled 알고리즘을 이용하여 계산하였다.
Fig. 4의 결과를 정리하면, Table 1과 같이 격자를 구성 후 정상 해석 결과 Coarse 격자의 경우 계산의 효율은 높았으나 후류 및 경계층 주변에서 세부 유동 구조가 충분히 계산되지 않아 다른 격자에 비해 공력계수에 오차가 존재하였다. Fine 격자는 가장 높은 정확도를 제공하였으나 계산 자원과 시간이 크게 소요되는 단점이 있었다. 반면 Medium 격자는 Fine 격자 대비 공력계수 차이가 2% 내로 결과를 도출하였고, 계산효율 측면에서도 가장 합리적인 결과를 나타냈다. 또한 Medium 격자에서의 압력장 분포를 확인한 결과, 탄체의 길이 방향 축을 기준으로 비교적 대칭적인 양상을 보였으며, 이는 비대칭 와류가 특정 격자 비대칭성(Grid-Induced Asymmetry)으로부터 기안하지 않았음을 뒷받침한다. 그리고 전영역(Full-domain) 격자를 이용한 정상 해석에서 계산된 압력장은 Fig. 5에서와 같이 좌·우 대칭성을 충분히 만족하였으며, 이로 인해 본 연구에서 관찰된 공력계수의 변동은 격자의 비대칭성에 의한 수치적 오차가 아니라 실제 비정상 유동 구조에서 기인한 것임을 확인하였다. 따라서 이후의 비정상 해석(URANS, LES)에서는 Medium 격자를 기준격자로 채택하여 계산을 수행하였다. 본 연구에서 구성한 Coarse–Medium–Fine 3수준 격자는 동체 표면의 경계층 격자뿐만 아니라 탄의 몸체 앞, 옆부분의 박리·재부착 구간, 근접후류(near-wake) 및 원거리 후류(far-wake) 영역 등 와류가 생성·발달·소산되는 주요 유동 영역에서의 공간격자 조밀도를 조절하여 격자 민감도 조정하여 생성하였다. 특히 동체 표면의 난류 경계층을 정확히 포착하기 위해 Y+ ≤ 1을 만족하도록 첫 번째 격자 높이를 설정하였으며, 총 10개 경계층격자, 격자의 증가율(Mesh growth rate) = 1.15로 경계층 내 점성 스케일을 충분히 포착을 위한 격자계를 생성하였다. 탄의 몸체 앞, 옆부분의 박리·재부착 구간과 후류의 와류 코어 영역에는 기준 격자 대비 0.3~0.5배 수준의 국부 격자 밀집(Local refinement)을 통해 공간격자 해상도를 강화하였다. 이러한 공간격자 기준에서 Medium 격자는 Fine 격자 대비 공력 계수 및 와류 구조 재현도 차이가 2% 이내로 확인하였다. 따라서 이후의 비정상 해석(URANS, LES)에서는 Medium 격자를 기준격자로 채택하여 계산을 수행하였다.
Table 1.
Configuration grid information
| Category | Coarse mesh | Medium mesh | Fine mesh |
| Mesh type | Polyhedral mesh | ||
| Number of cells | 1,758,930 Cells | 7,537,325 Cells | 11,921,128 Cells |
| Boundary layer mesh | ≤1, Number of prism layers = 10 Layers | ||
2.4 비정상 유동해석
2.4.1 URANS 해석
비정상 유동해석에는 Time-step 크기와 서브 반복 횟수가 계산의 안정성과 정확성에 큰 영향을 미친다. 본연구에서는 기준 유속 와 대표 길이 척도 L을 바탕으로 특성 시간 를 정의하였다. Time-step은 특성 시간의 약 1/100 ~ 1/200 수준으로 설정하여 비정상 유동의 주기적 변화를 충분히 포착하도록 하였다. 구체적으로 Δt = 1×10-4s 을 사용하였으며, 추가로 Δt 의 절반, 두 배로 변화시켜 시간에 따른 영향력(Time-step independence)을 검증하였다. 그리고 각 Time-step에서 비선형 수렴을 확보하기 위해 반복 계산(Sub-iteration)을 수행하였는데, 각 Time-step 당 계산 횟수는 잔차가 3자리 수 이상 감소하거나 공력계수의 변화가 0.1% 이하가 될 때까지 수행하도록 설정하였다. 일반적으로 각 Time-step에서 100회의 반복 계산으로 충분하였으며, 수렴 특성이 불안정할 경우 50회까지 확장하였다. 이러한 설정을 통해 수치적 안정성을 확보하면서도, 시간 평균 및 표준편차(Standard Deviation) 결과가 Time-step 크기와 각 Time-step에서의 반복 횟수에 크게 의존하지 않음을 확인하였다.
2.4.2 LES 해석
본 연구에서는 비정상 유동 특성을 더욱 정밀하게 해석하기 위하여 LES 해석을 수행하였다. Wall-Modeled LES를 적용하였으며, 벽면 부근의 난류는 Wall model로 처리하고, 벽으로부터 이격된 영역에서 에너지 지배적인 대규모 와류를 직접 해상하는 방식으로 계산을 수행하였다. 이러한 접근은 복잡한 박리·재부착 영역의 비정상성을 보다 정확히 재현하면서도 계산 자원을 효율적으로 사용하는 장점이 있다. 이를 통해 URANS에서 평균화되어 소실되는 비정상 구조를 더 정확하게 포착할 수 있다.
해석을 위해 Pressure-based Coupled Solver를 사용하여 수행하였으며, SGS 모델로 WALE(Wall-Adapting Local Eddy–Viscosity) 모델을 적용하였다. WALE 모델은 벽면 근처의 난류 점성을 국소적으로 조정하여, 복잡한 경계층 유동에서도 안정적이고 정확한 에너지 분해 특성을 제공한다.
LES 계산의 안정성과 벽면 근처 유동 해상도를 확보하기 위해 벽면 첫 격자 높이는 Y⁺ ≤ 1을 만족하도록 구성하였으며, 실제 해석에서 최소 Y⁺는 약 0.1 수준으로 유지되었다. 또한 Time-step Δt = 1×10-4 s를 기준으로 계산된 국소 CFL 값은 대부분 0.2 ~ 0.8 범위, 벽면 정체영역에서도 CFL_max ≈ 1.2 이하로 확인되어, LES 해석의 안정성 조건을 충분히 만족하였다. 따라서 사용된 시간 간격은 대규모 와류 해상에 필요한 시간 분해능을 확보하면서도 수치적 안정성을 충족함을 검증하였다.
벽면 근처의 난류 해상도를 확보하기 위해 Wall model을 적용한 WMLES(Wall-Modeled LES) 접근법을 사용하였다. Time-step 크기와 서브 반복 횟수는 URANS 해석과 동일하게 각각 Δt = 1×10-4 s, 100회로 정의하여 설정하였다. LES 계산의 안정성을 확보하기 위해 초기 0.01s 구간은 1차 정확도(First-order implicit scheme)로 계산을 시작한 후, 정상 상태에 도달한 시점부터 2차 정확도(Second-order implicit scheme)로 전환하였다. 이러한 설정을 통해 LES 해석은 비정상적 요의 비정상 와류 구조를 효과적으로 포착하였으며, URANS 결과보다 공력계수 , 의 변동 진폭이 크게 나타나 실제 비대칭 와류 방출 특성을 보다 현실적으로 재현할 수 있었다.
2.4.3 과도 구간 처리
계산 초기에 공력계수 , 는 큰 진동을 보이다가 점차 잦아드는 경향을 나타냈다. 본 연구에서는 전체 계산 시간 0~3초 이상 중 공력계수의 변화 양상과 박리·재부착 유동의 발달을 고려하여 0~1초 구간을 과도 영역으로 정의하였다. 이후 정상적 통계 구간으로 선정한 1.0~2.0초 구간은 약 1초의 길이를 가지며, 에 대한 주파수영역 분석(FFT)에 따라 산출된 지배적 주기(대표주기)≈0.025s로 나타났다. 따라서 평균 산정 구간인 1.0 ~2.0초 구간(총 1초)에는 약 40회 이상의 주기(1s/0.025s≈40)가 포함되어 평균 산정에 충분한 시간적 표본을 제공한다. 또한 평균 산정 구간을 단계적으로 확장(1.0~2.0초, 1.0~2.5초, 1.0~3.0초)하여 비교한 결과, 평균값 변화율은 1% 이하, 표준편차 변화율은 5% 이하로 나타나 시간 평균의 통계적 안정성이 확보됨을 확인하였다.
2.4.4 비정상(URANS vs LES) 유동해석 결과
비정상 해석의 신뢰성을 검증하기 위하여 RANS·URANS·LES 해석 결과를 풍동시험 결과와 비교하였다. 받음각 2° 및 6° 조건에서 수직력계수 의 평균값 와 무게중심 기준의 피칭모멘트계수 의 평균값 를 각각 비교하였으며, 그 결과를 Table 2에 정리하였다.
Fig. 6에서와 같이 받음각 2°에서는 비정상성이 나타나기 시작하는 전이 구간으로, URANS 대비 LES에서 , 계수의 표준편차가 20% 이상 크게 나타났다. 그리고 받음각 6°에서는 강한 분리 구간으로 URANS와 LES 모두 광대역 주파수(Broadband) 특성을 보였으나, LES가 후류 비대칭 구조를 더 세밀히 재현하여 , 계수의 표준편차가 추가로 증가하였다. 이를 통해 URANS는 비정상 현상의 전반적 경향을 파악하는 데 유용하고, LES는 세부 유동 구조와 진폭 특성을 보다 정밀하게 포착할 수 있음을 확인하였다[3,6].
Table 2.
Comparison of experimental data with RANS, URANS, and LES results
받음각 2° 조건에서, LES 해석 결과의 수직력계수 는 풍동시험 대비 약 +6.2%의 오차를 보였으며, URANS 역시 약 +8.1%로 유사한 수준이었다. 반면 RANS는 상대적으로 작은 오차를 보이지만, 정상해석 특성상 비정상적인 진동 성분을 포착하지 못하였다. 피칭모멘트계수 의 경우는 LES 해석 결과가 풍동시험에 가장 근접하여, LES 모델의 물리적 신뢰성을 확인할 수 있었다.
받음각 6° 조건에서는 LES 해석이 풍동시험 값보다 약 +4.6% 높은 값을 예측하였으며, URANS와 RANS는 각각 +1.4%, -2.5% 수준의 차이를 나타냈다. 이와 같은 오차 범위는 전산유체해석에서 일반적으로 허용 가능한 ±5% 수준으로, 전체적으로 CFD 해석 결과가 실험값과 매우 양호하게 일치함을 의미한다. 의 경우 모든 해석에서 실험값과 ±4% 이내로 일치하였으며, LES 결과가 가장 근접하였다.
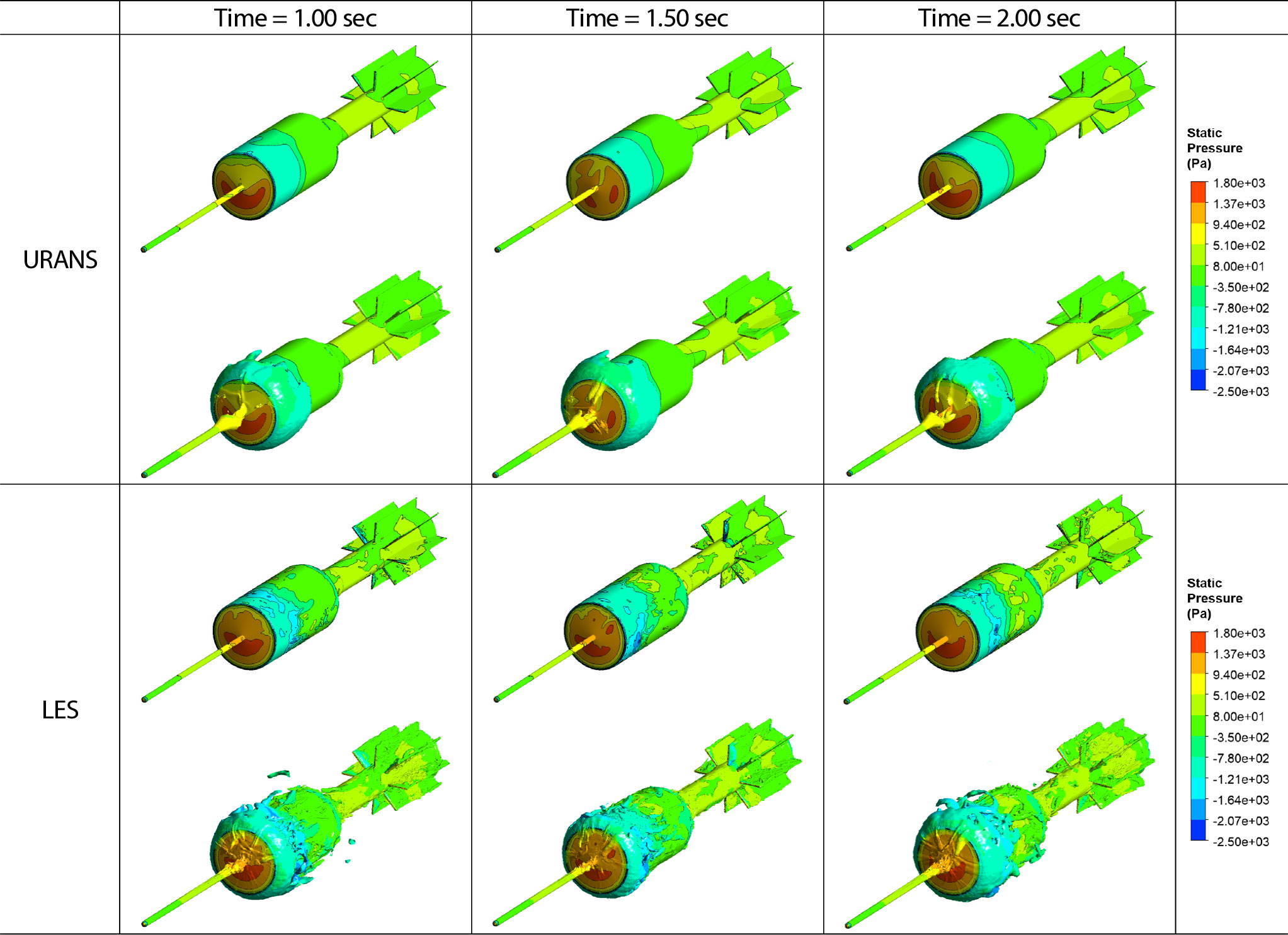
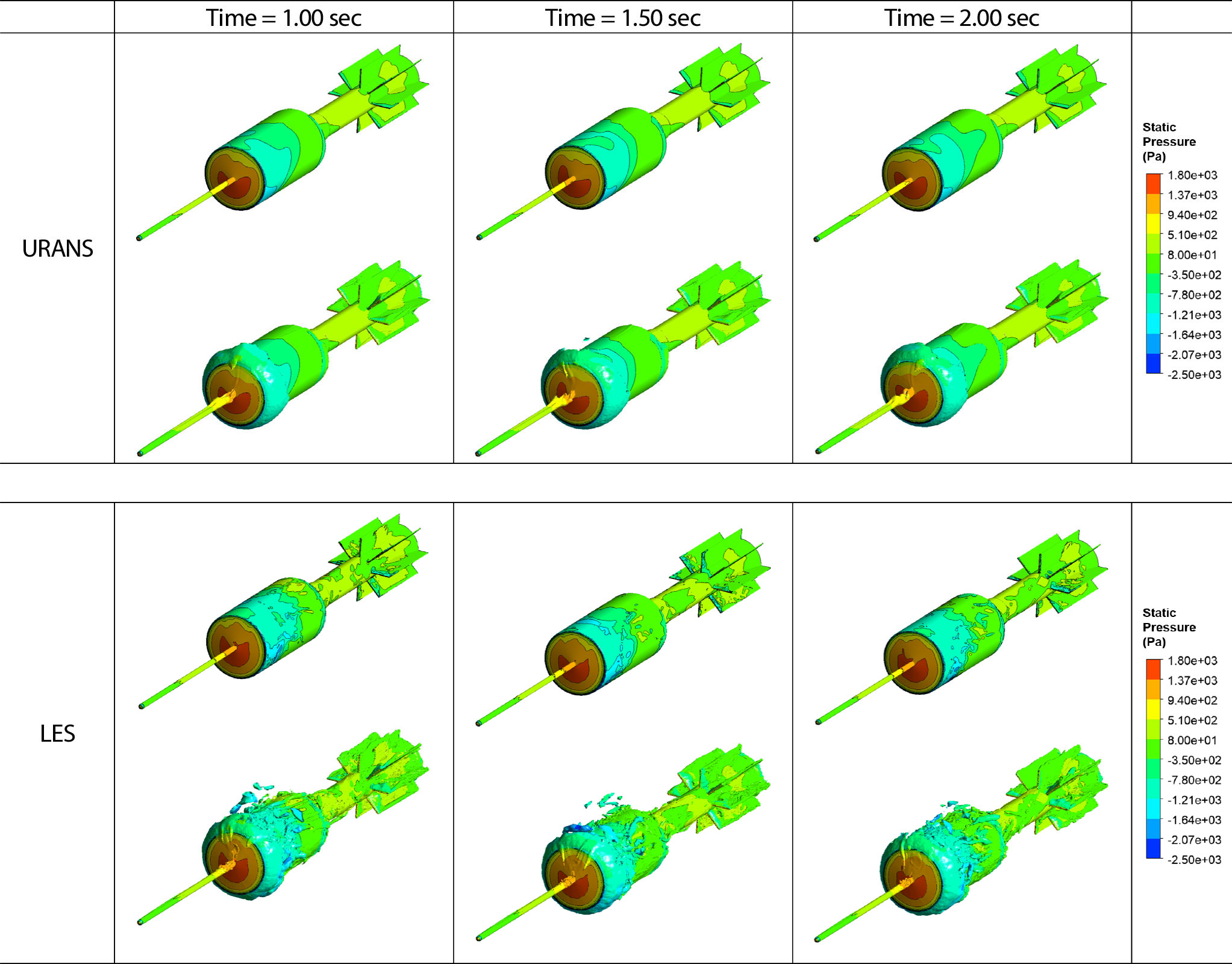
전반적으로 LES 해석은 URANS 및 RANS 해석보다 와 의 평균값을 풍동시험에 더 근접하게 재현하였으며, 동시에 시간에 따른 진폭 변동을 포함하여 실제 비정상 유동 거동을 포착하였다. 이는 LES가 비대칭 요 현상의 비대칭 와류 방출 특성을 보다 현실적으로 표현할 수 있음을 의미한다. 따라서 LES는 평균 공력 특성과 시간 의존적 변동 특성 모두에서 가장 신뢰성 높은 결과를 제시하였으며, 비대칭 요의 원인 해석 및 형상 최적화를 위한 대표 해석 기법으로 적합함을 확인하였다. 아래의 Fig. 7, Fig. 8에는 각각 받음각 2° 및 6° 조건에서 시간 변화에 따른 URANS 와 LES 해석 결과의 압력장을 비교하였다.
2.5 Guide 형상 정의
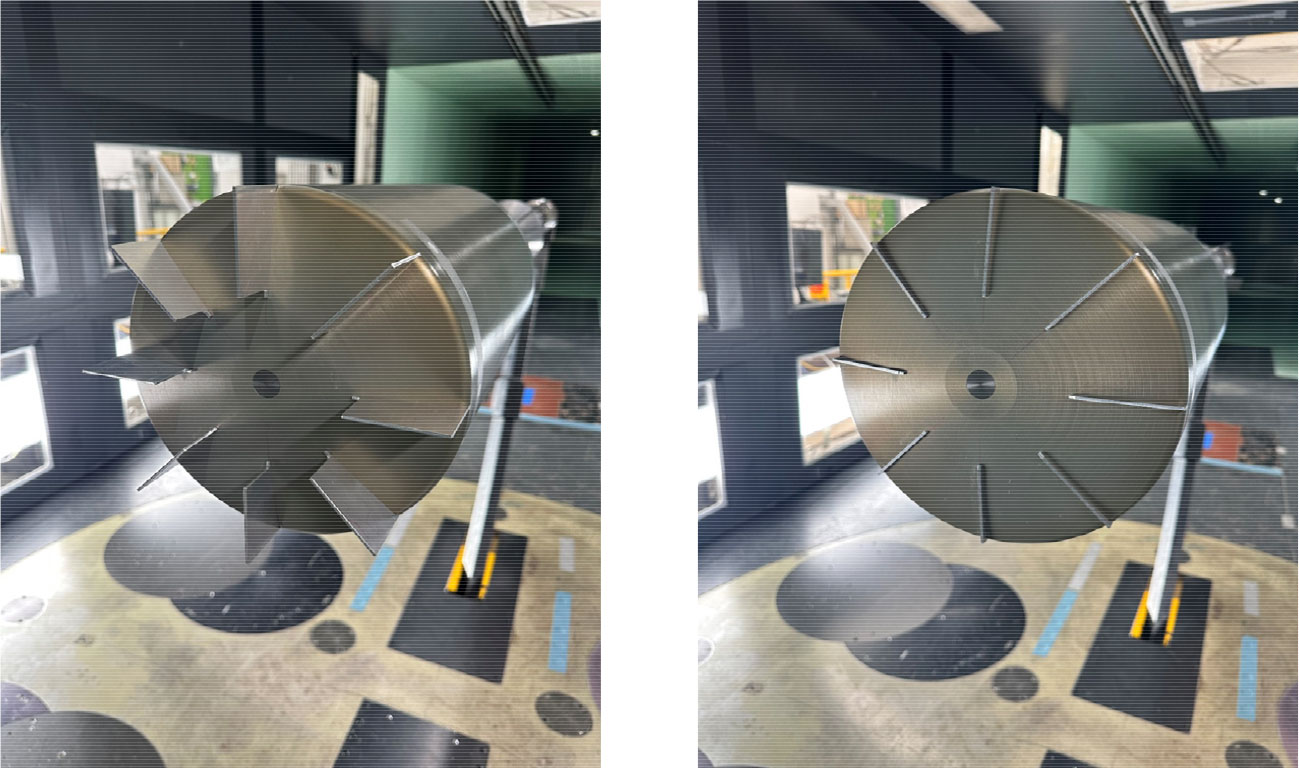
비대칭 와류 억제를 위해 전방부에 보조 핀(Auxiliary Fins)을 중심축 기준 60° 간격으로 균일하게 배치하였다. 이는 보조 핀이 와류 구조를 정렬시켜 유동 대칭성을 강화했음을 의미한다[5]. 핀의 전방 경계층의 비대칭 분리를 약화하고, 로켓발사식 지뢰제거탄 전방부에서 발생하는 와류의 위상 불일치를 감소시키는 것을 목표로 설계하였다. 아래의 Fig. 9에는 Guide 형상을 제시하였으며, Fig. 10에는 해당 형상에 대한 풍동시험 수행 장면을 나타내었다. 풍동시험 결과 받음각 2°, 6°에서 모두 피칭모멘트의 진폭이 뚜렷하게 완화되었다.

2.6 Guide 형상 LES 해석 결과
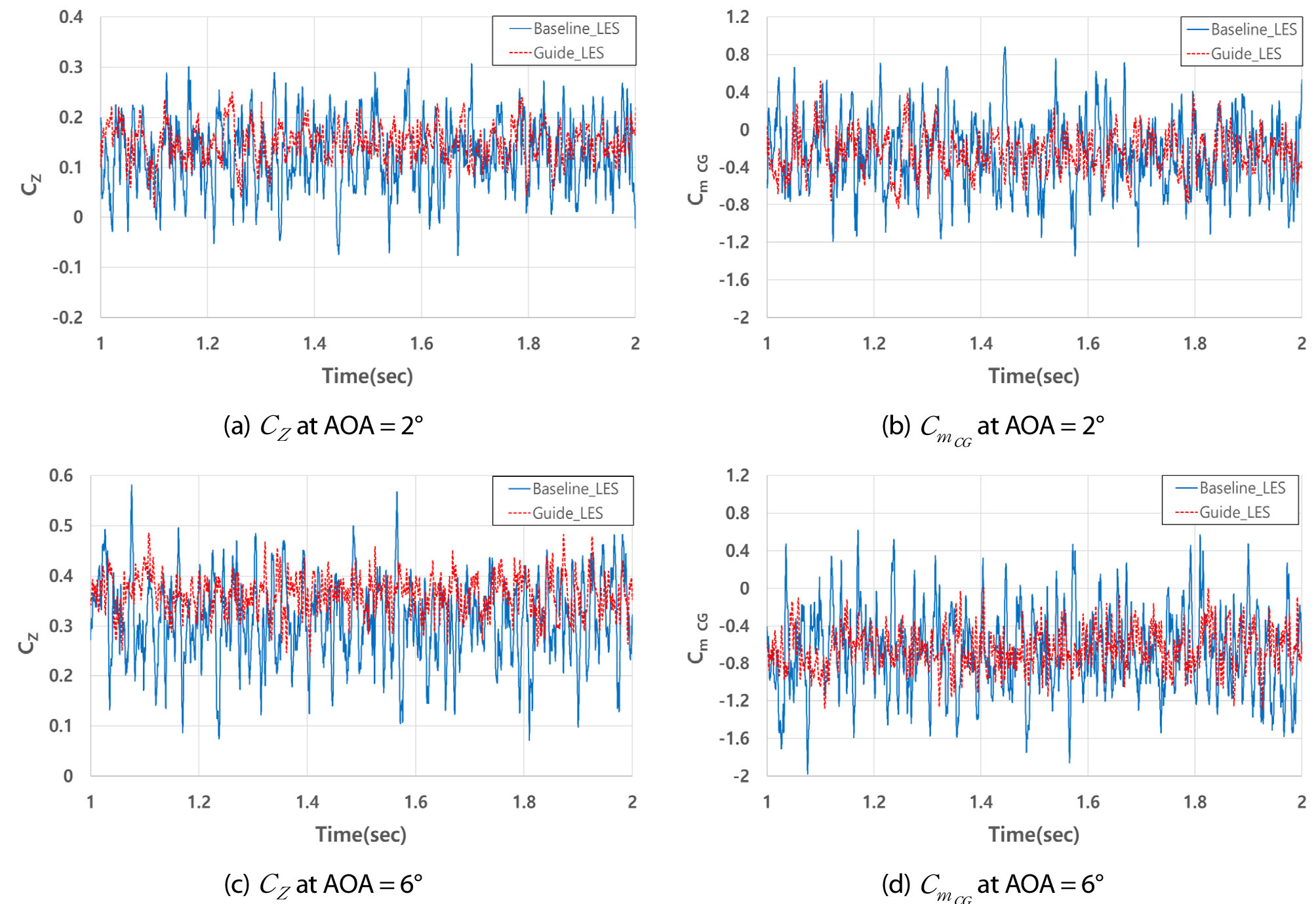
속도 , 받음각 2°, 6°에서 LES 해석을 수행한 결과 수직력 계수 및 피칭모멘트 계수의 변동 진폭이 유의하게 감소하였다. 비행 안정성에 큰 영향을 미치는 시간 평균의 은 Baseline 형상 대비 최대 6% 수준으로 핀 추가가 평균 공력 중심에 미치는 영향은 제한적이었다. 핀 장착 후 공력계수의 비정상 변동성은 표준편차(σ)를 기준으로 평가하였으며, Baseline 대비 Guide 형상에서 σ 값이 유의하게 감소하여 비정상 유동에 따른 요동 규모가 효과적으로 완화됨을 확인하였다.
수직력계수 및 피칭모멘트계수의 표준편차 감소율은 받음각 6°에서 최대 59.53%, 51.02%로 나타났으며 주파수 특성에서 단일 피크가 두드러지지 않는 광대역 주파수(Broadband) 특성은 유지되었으나, 피크 대역의 파워가 전반적으로 저감도로 완화되는 것이 관찰되었다. 그리고 핀 장착 후 후류 영역의 비대칭 와류 구조는 Baseline 대비 명확히 완화되었으며, 후류 중심선을 기준으로 한 압력 분포와 속도 분포의 좌우 차이가 감소하여 보다 안정된 후류 구조가 형성되는 것으로 나타났다.
추가적으로, 가이드 형상 적용 후 항력 계수(Cx)에 미치는 영향을 URANS 및 LES 결과를 통해 검토한 결과, Baseline 대비 약 1.5% 수준의 항력 증가는 존재하였으나, 본 로켓발사식 지뢰제거탄은 충분한 추진력을 확보하고 있으며, 고각 발사를 통해 사거리를 조절하는 운용 특성을 고려할 때, 이러한 미세한 항력 증가는 비행 성능과 사거리에 실질적인 영향을 미치지 않는 것으로 판단된다. 또한 가이드 형상에 의해 수직력 및 피칭모멘트의 진폭이 현저히 감소함에 따라 전체적인 비행 안정성 향상 효과가 더 크게 기여하는 것으로 분석되었다.
각 조건에서 계산된 시간 이력으로부터 공력계수 및 의 평균값(Mean) 과 표준편차(Standard Deviation) 를 산출하여 통계적으로 비교하였다. 시간 구간은 초기 과도 구간을 제외한 안정 구간에서 선택하였으며, 전체 계산 시간 T 동안의 각각의 공력계수 , 에 대해 다음 식을 사용하였다.
Table 3에서 계산된 는 각 계수의 시간에 따른 진폭을 나타내며, 이를 통해 형상 변경 전후의 비정상성 변화를 정량적으로 평가하였다.
Table 3.
Comparison of mean and standard deviation aerodynamic coefficient(Baseline vs. Guide)
받음각 2°에서는 Guide 형상 적용 시 표준편차가 증가하는 경향이 나타났는데, 이는 해당 조건이 박리·재부착이 발생하기 시작하는 전이 영역으로, Guide 형상에 의해 전방부 와류의 위상이 일시적으로 재배열되면서 성분의 저주파 변동이 증폭되었기 때문으로 판단된다. 반면 받음각 6°에서는 강한 분리유동이 형성되며 Guide 형상이 비대칭 와류를 효과적으로 억제하여 및 의 표준편차가 각각 59.53%, 51.02% 감소하는 뚜렷한 안정화 효과가 나타났다.
Fig. 11에 제시된 바와 같이 이러한 진폭의 감소는 가이드 구조가 탄두 전방의 비대칭 와류 방출을 안정화시켜, 후류의 비정상적인 요방향 모멘트를 억제한 결과로 해석된다.
Baseline 형상과 Guide 형상의 수직력계수 차이가 받음각 6° 일 때 약 15% 정도 차이가 나는데, 이는 Guide 형상에서 부가된 보조핀 영향력 때문이다. 하지만 차이가 약 4% 수준으로 , 로켓발사식 지뢰제거탄의 비행 안정성에 보조핀이 큰 영향을 미치지 않으면서도 변동 성분을 효과적으로 억제함을 의미한다.
받음각 6° 조건에서 Guide 핀 부착 시 압력중심()이 전방으로 이동하는 현상이 관찰되었으나, 여기서 는 탄체 직경 D를 기준으로 무차원화하여 표현되는 반면, 피칭모멘트계수 은 무게중심()을 기준점으로 전체 길이 L을 기준 길이로 정의된다. 이로 인해 동일한 길이 변화라도 D 기준의 이동량은 L 기준으로 환산할 경우 상대적으로 작은 변화가 되며, 모멘트 암 감소 효과가 축소되어 변화율은 약 4% 수준으로 나타나는 것이 물리적으로 타당하다. 따라서 의 상대적 이동량이 크게 보이더라도, 실제 피칭모멘트 변화가 작게 나타나는 것은 기준 길이의 차이에 기인한다. 결과적으로 Guide 형상은 평균적인 피칭모멘트 특성을 크게 저해하지 않으면서도, 시간에 따른 피칭모멘트 변동 성분을 Fig. 12에 나타난 바와 같이 효과적으로 감소시켜 비행 안정성을 향상시키는 개선안으로 판단된다.
한편, Guide 형상 적용 후 축력계수의 변화를 검토한 결과 Baseline 대비 약 1.2% 증가하는 것으로 나타났다. 이는 로켓 추진력을 기반으로 고각 발사 방식으로 운용되는 본 지뢰제거탄의 사거리 특성상 실제 비행 거리 감소에 미치는 영향이 미미한 수준이다. 반면 수직력계수와 피칭모멘트계수의 시간 변동 진폭은 각각 최대 59.53%, 51.02% 감소하여 비행 안정성 향상 효과가 훨씬 크게 나타났다. 따라서 미세한 항력 증가보다 변동 억제 효과가 설계 목표에 보다 중요한 요소임을 확인하였다. 그리고 두 계수의 감소율이 다르게 나타났으며, 이는 각 계수가 지배받는 유동 메커니즘의 차이에 기인한다. 위의 결과를 통해 Guide 형상은 비대칭 와류 현상의 주요 비정상 성분을 효과적으로 완화해준다고 결론할 수 있다.
3. 결 론
정상 RANS 해석 결과, 평균적인 공력 계수는 일정한 값으로 수렴하였으나, 실제 실험에서 관찰되는 비대칭 와류 방출 및 비대칭적 요 현상은 재현되지 않았다. 이는 정상 해석이 시간에 따른 유동 변동성을 평균화하여 계산하기 때문에, 비정상적인 와류 구조나 진동 특성을 표현하는 데 근본적인 한계가 있음을 보여준다. 반면 비정상 해석(URANS, LES)의 경우 시간 이력에서 불규칙한 진동을 보였으며, 이는 로켓발사식 지뢰제거탄 전방부에서의 비대칭 와류 방출과 직접적으로 연관된다. URANS는 평균적인 RANS 수준과 주요 진동 모드를 재현하는 데 유용하였으며, LES는 광대역 주파수(Broadband) 스펙트럼과 와류 구조를 더욱 정밀하게 포착할 수 있었다
두 접근법을 비교한 결과, 정상 해석은 공력 계수의 정성적 추세를 빠르게 파악할 수 있는 장점이 있지만 비대칭적요와 같은 비정상 유동 현상 분석에는 적합하지 않았다. 비정상 해석은 계산 비용이 증가하더라도 비대칭 와류의 발생 메커니즘을 규명하고, 형상 변화에 따른 완화 효과를 정략적으로 평가하는 데 필요함을 확인하였다.
