

1. 서 론
2. 멀티콥터형 비행체 형상
2.1 요구도 및 임무형상
2.2 형상 도출
3. 공력 DB 구축 방법
3.1 공력 DB 구조
3.2 공력 DB 구축 범위
3.3 공력 DB 구축 도구
4. 공력 DB 구축 결과 및 평가
4.1 공력 DB 구축 결과
4.2 공력 DB 평가
5. 결 론
1. 서 론
세계 인구가 도시를 중심으로 지속적으로 성장함에 따라 지상 교통 혼잡과 환경문제가 심각해지고 있다. 이를 완화하기 위해 친환경적이면서도, 저고도 영역을 활용할 수 있는 새로운 체계의 교통수단으로 도심항공교통(urban air mobility, UAM)이 주목받고 있다[1,2]. UAM 비행체들은 도심 내에서 운용되기 때문에, 별도의 활주로 없이 이착륙 가능해야 하며 대기 오염 및 소음 공해 저감이 중요한 설계 이슈로 고려된다. 이에 따라 분산전기추진동력(distributed electrical power, DEP) 시스템을 적용한 전기동력 수직이착륙기(electric-powered vertical take off and landing, eVTOL) 형태로 다양한 연구 및 비행체 개발이 이루어지고 있다[3]. 대표적인 UAM 비행체로는 미국의 Joby Aviation 社에서 개발 중인 S4[4]와 독일의 Volocopter 社의 2X, Volocity[5], 중국의 EHang 社의 EHang 184, EHang 216[6] 등을 들 수 있다. 국내에서도 2022년부터 대규모 실증사업인 한국형 도심항공교통(K-UAM) 그랜드챌린지(GC)를 시작하면서 2025년도 상용화를 목표로 UAM 교통체계에 대한 연구가 활발하게 진행되고 있다[7,8,9].
UAM 비행체들은 전통적인 여객기, 헬리콥터, 전투기 등과 달리 저고도 및 도심 내에서 운용되기 때문에 상용화를 위해서는 가상 통합환경 하에서 다양한 시뮬레이션을 통한 사전 검토와 실증이 필수적이다. 비행체 운항과 관제, 운용 중 발생 가능한 상황과 날씨 변화 및 비행체 고장 등의 다양한 가상 시나리오를 통해 운용 방식과 개념을 검증하고, 실제 운용 환경에서의 최적의 운용 방안을 설계 및 도출 가능하다. 비행 시뮬레이터는 미래의 UAM 생태계에서 많은 수요가 예상되는 조종 및 관제, 운용 분야의 인력 양성에도 활용할 수 있으며, 실제와 유사한 가상환경에서 비행체의 안정성을 검증하는 효과적인 도구로 사용되고 있다[10,11]. UAM 비행체들은 추력편향(thrust-vectoring), 리프트-크루즈(lift-cruise), 멀티콥터(multicopter)등의 다양한 컨셉으로 개발되고 있기 때문에, 비행 시뮬레이터에 탑재된 운동 모델링이 각 비행체의 공력 특성을 잘 반영할수록 시뮬레이션의 정확도를 확보할 수 있다. 하지만 다수의 프로펠러를 가지는 UAM 비행체 특성상 모든 프로펠러의 회전을 포함한 고정확도의 전기체 전산 유동 해석은 막대한 시간과 자원이 소요되므로 효율성 측면에서 부적합하며, 공력 데이터베이스(database, DB) 구축을 위한 방법으로는 현실성이 저하된다.
본 연구에서는 UAM 비행 시뮬레이터 탑재용 공력 DB를 시간 효율적으로 구축하기 위해 성분합성법(component build-up method, CBM) 개념을 적용하여 공력 DB의 기본 구조를 설계하고, 멀티콥터형 비행체에 대한 공력 DB를 구축하였다. 공력 DB는 기체(airframe)와 프로펠러의 6분력 계수 및 자세각 변화율에 대해 기체 동미계수에 의한 공력 계수 변화량으로 구성하였다. 또한, 슬라이딩 메쉬 기법(sliding mesh method, SMM)을 활용하여 모든 프로펠러를 포함한 전기체 해석을 수행하여 구축한 공력 DB의 신뢰도 및 활용 가능성을 평가하고, 기체-프로펠러와 프로펠러간 공력 간섭 분석을 통해 간섭효과를 추가로 반영하는 공력 DB의 고도화 필요성에 대해 검토, 논의하였다.
2. 멀티콥터형 비행체 형상
2.1 요구도 및 임무형상
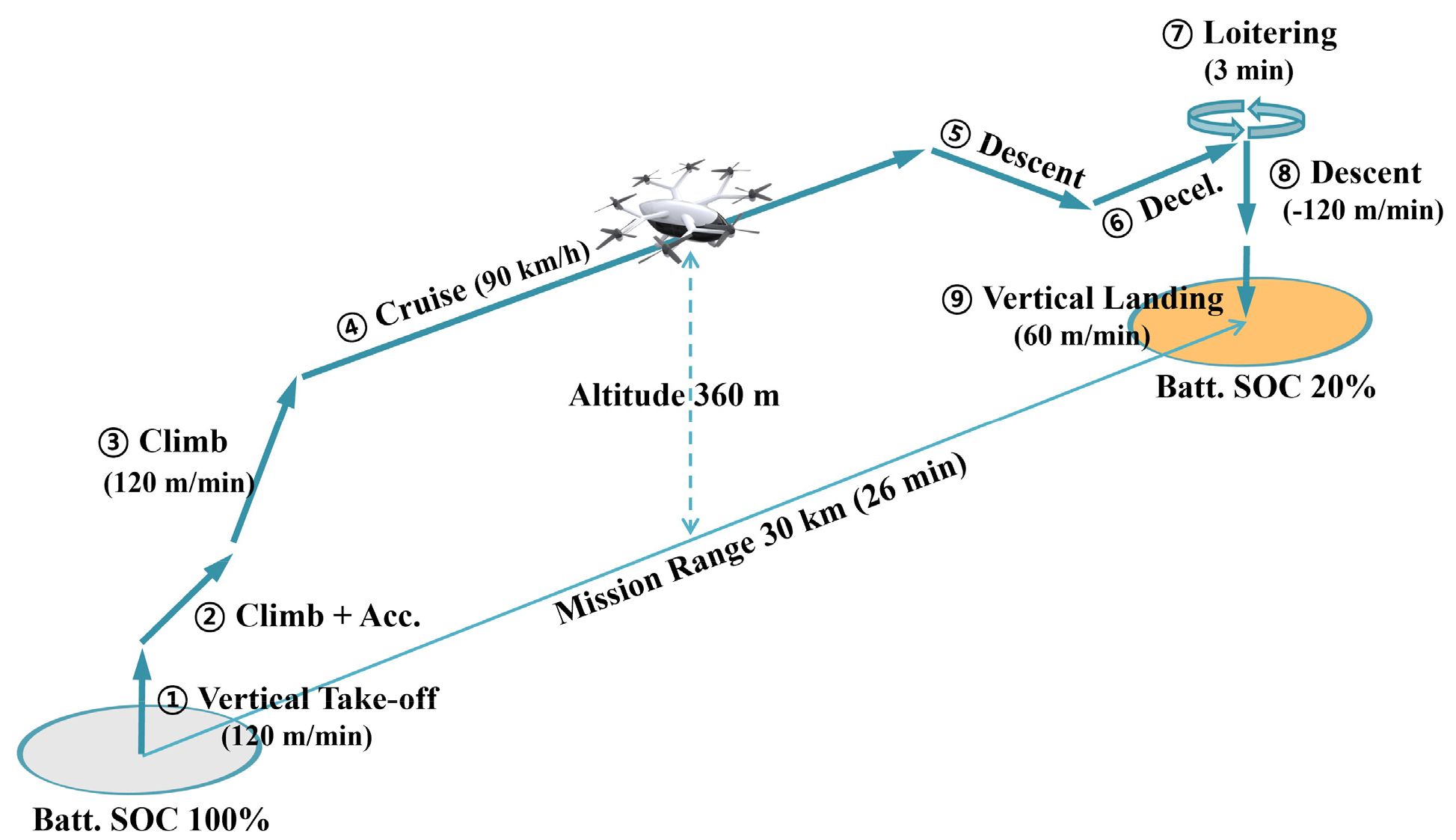
멀티콥터형 비행체는 추력편향, 리프트-크루즈형 비행체와 달리 회전익 모드만으로 비행하며, 일반적으로는 제자리 비행 효율이 다른 유형 대비 높게 설계되는 특성을 갖는다. 또한, 다중 프로펠러로 구성되어있어 안정적인 비행이 가능하며, 구조와 시스템 복잡도가 상대적으로 낮아 제조단가 및 유지비용이 낮다는 장점을 가진다. 하지만 양력면(lifting surface)이 없는 형상적 특징으로 인해 비행 속도가 낮고 체공시간도 짧아 항속거리에 한계가 존재하기 때문에, 이러한 특징들을 고려하여 요구도와 임무형상을 설정하였다.
Table 1은 멀티콥터형 비행체의 요구도를 나타내며, 기 개발 중인 타 비행체들의 제원과 현재의 기술적 제약조건 등을 종합 고려하여 설정하였다[12,13]. 유상하중은 조종사 1명과 승객 2명의 탑승을 고려하여 300 kg 이상으로 설정하였으며, 순항 속도 및 항속거리는 유사한 유상하중을 갖는 타 개념설계 비행체의 성능을 참고하여 각각 90 km/h 이상과 30 km 이상으로 설정하였다. 추가로, 현재 개발 중인 멀티콥터형 비행체들은 대부분 스키드 형태의 착륙장치를 사용하여 수직이착륙하도록 설계되어있지만, 본 연구에서는 바퀴가 장착된 착륙장치를 고려하여 지상 및 버티포트 등 주기장에서의 견인차 등을 이용한 이동성을 함께 확보하였다. 요구도를 충족하는 임무형상은 Fig. 1과 같다.
Table 1.
Requirement for multicopter type UAM aircraft
2.2 형상 도출
비행체 초기 사이징에는 서울대학교에서 개발 및 운용 중인 수직이착륙기 통합해석 및 개념설계 프로그램인 RISPECT+를 사용하였다. 이는 복합형 회전익기(compound rotorcraft) 해석 프로그램을 다양한 아키텍쳐의 DEP 시스템에 대한 해석이 가능하도록 확장한 프로그램으로써, 멀티콥터형 비행체에 대한 기본 성능해석, 중량 추정, 사이징, 비용 분석이 가능하다[14,15]. 비행체 총중량 최소화를 목적함수로 하고 전역 최적화 기법 중 하나인 진화 알고리즘(evolutionary algorithm)을 사용하여 전체 설계공간 내에서 추진 시스템 최적화를 수행하였다. 프로펠러는 사전 설정된 비행체의 중심점을 기준으로 방위각을 따라 등간격으로 8개가 배치된 형상을 가정하여 설계하였으며, 동체 형상은 NASA에서 제시한 쿼드로터 비행체 컨셉[16]을 참고하여, 조종사 및 탑승 인원에 맞게 수정하여 적용하였다.
프로펠러의 제자리 비행 효율을 높이고, 승객의 탑승감 향상을 위해 프로펠러 형상과 장착각, 중심 위치의 높이 등을 수정하여 최종 도출한 멀티콥터형 비행체의 형상은 Fig. 2와 같다. 옥타콥터(octacopter) 방식의 고정 피치 리프팅 프로펠러로 구성되어있으며, 회전수 제어 방식을 채택하였다. 동체와 프로펠러는 4개의 주 버팀대(main strut)과 8개의 가지(branch)로 구성되어있으며, 하나의 주 버팀대에서 2개의 가지가 분기되어 각 가지의 끝에 프로펠러가 장착되도록 모델링하였다.
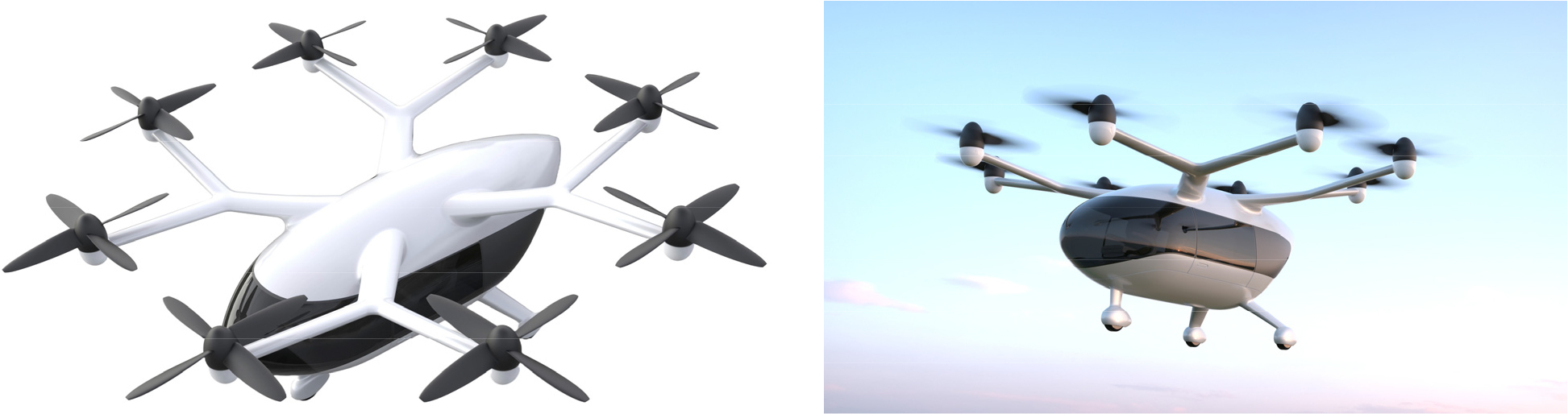
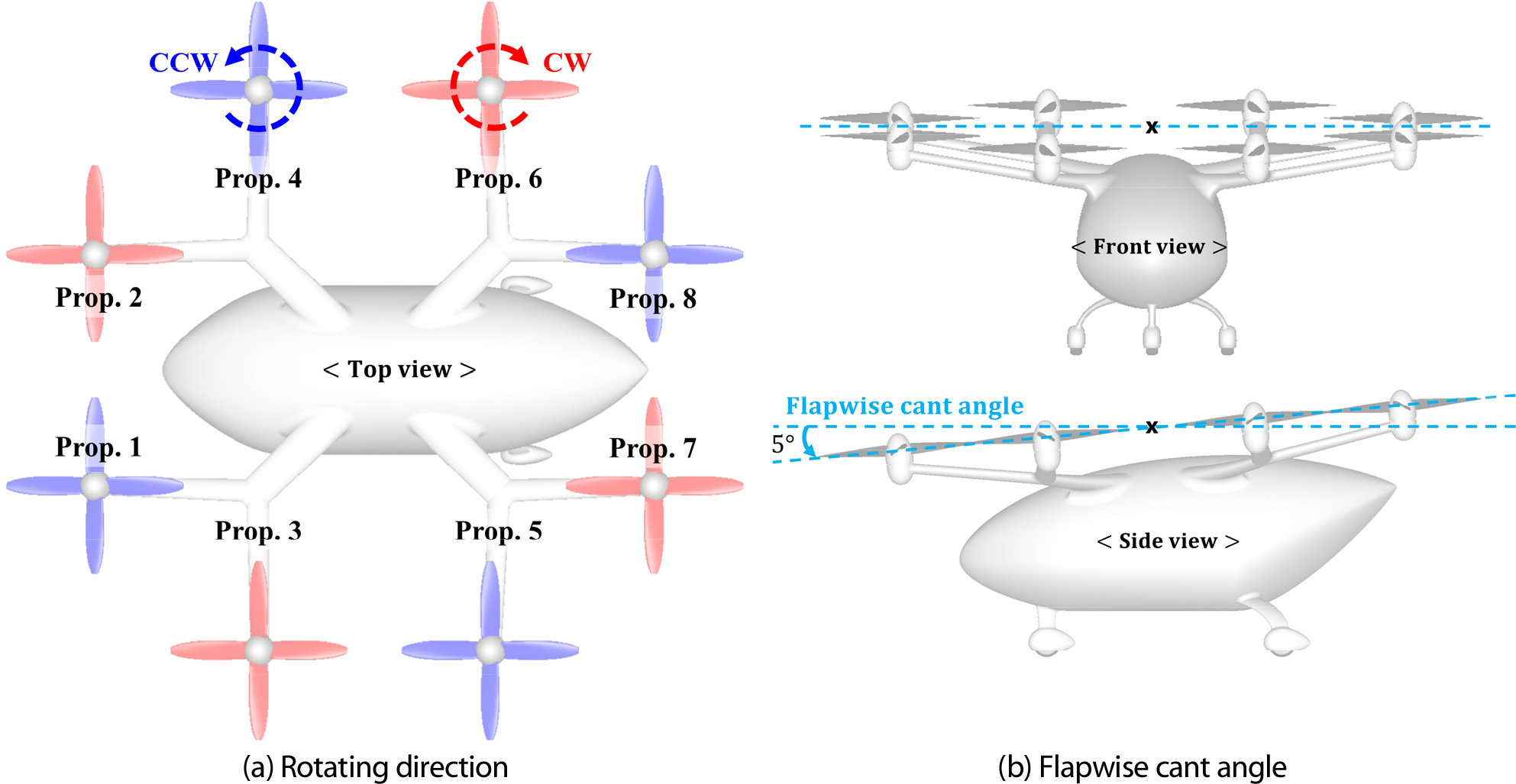
Table 2는 도출된 멀티콥터형 비행체의 기본 제원으로, 총중량은 약 1,300kg이다. 프로펠러 블레이드는 Clark-Y 단일 에어포일을 적용하였으며, 블레이드 개수는 4개이다. 각 프로펠러의 회전 방향은 Fig. 3(a)와 같으며, Fig. 3(b)와 같이 플랩방향 장착각(flapwise cant angle) 5°를 가지고 있다.
3. 공력 DB 구축 방법
3.1 공력 DB 구조
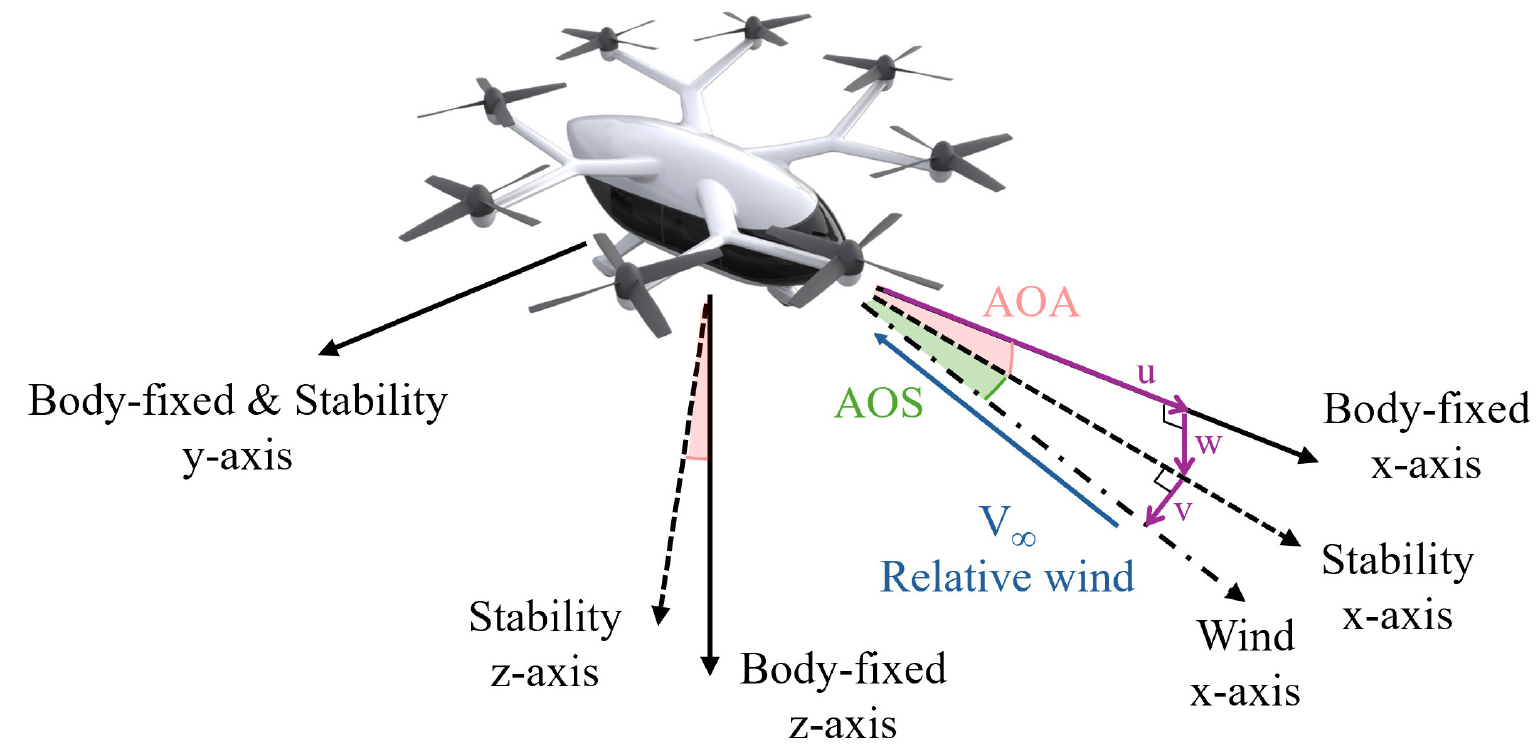
Fig. 4는 공력 DB에 탑재되는 데이터 및 공력해석을 위한 기준 좌표계를 나타내며, 기체고정 좌표축(body-fixed axis)과 안정성 좌표축(stability axis)을 사용하였다. 형상 도출 과정에서는 무게중심점을 특정하지 않았고, 추후 시뮬레이터 내 운동 모델링 상에서 비행체 무게중심 설정 및 변경에 유연하게 대응 가능하도록 모멘트 기준점은 비행체의 노즈점으로 설정하였다.
공력 DB의 자료 구조는 기체 DB와 프로펠러 DB로 분리하여 구성하였으며, 기체와 프로펠러의 6분력 계수를 기준값(baseline)으로 하고, 추가적인 힘과 모멘트가 발생하는 요인들에 대해 개별적인 DB를 구축하여 합산하는 CBM 개념을 적용하였다. 각 요인들에 대한 DB는 기준값에 대한 변화량으로 계산하여 특정 유동 조건에 대한 공력 값 산출 시에는 모든 DB들의 값을 더하여 전기체 공력 값을 획득하게 된다. 기체 DB는 기체 정적 6분력 계수와 자세각 변화율에 의한 동미계수, 기체와 프로펠러 간의 상호작용 및 지면 효과 등으로 구성요소들을 식별할 수 있으며, 본 연구에서는 우선적으로 식 (1)과 같이 기체의 6분력 계수와 동미계수의 기여만을 포함한 DB를 고려하였다. 멀티콥터형은 Part I의 리프트-크루즈형과 달리 조종면을 갖지 않기 때문에 조종면 작동에 의한 공력 계수 변화량은 제외하였다. 프로펠러 DB는 프로펠러의 6분력 계수와 프로펠러 간의 상호작용으로 구성될 수 있으며, 본 연구에서는 식 (2)와 같이 프로펠러의 6분력 계수만으로 구성하였다.
𝜙 는 3축 방향 힘과 모멘트이며, N은 프로펠러의 개수를 나타낸다. 기체 및 프로펠러 DB에 탑재되는 공력 데이터는 다음의 식 (3), (4), (5)을 사용하여 획득하였으며, 무차원시 사용된 값의 정의와 수치는 Table 3에 나타내었다.
여기서, q∞ 는 동압을 뜻하며, p, q, r은 동미계수 산출 시 사용된 롤, 피치, 요 변화율을 의미한다. ρ는 밀도, n은 프로펠러의 회전속도를 뜻하며, i는 3축 방향을 나타낸다.
Table 3.
Reference values for calculation of aerodynamic coefficients
| S | Fuselage projection area[m2] | 9.345 |
| b | Fuselage width[m] | 2.0 |
| c | Fuselage length[m] | 5.765 |
| D | Propeller diameter[m] | 2.1014 |
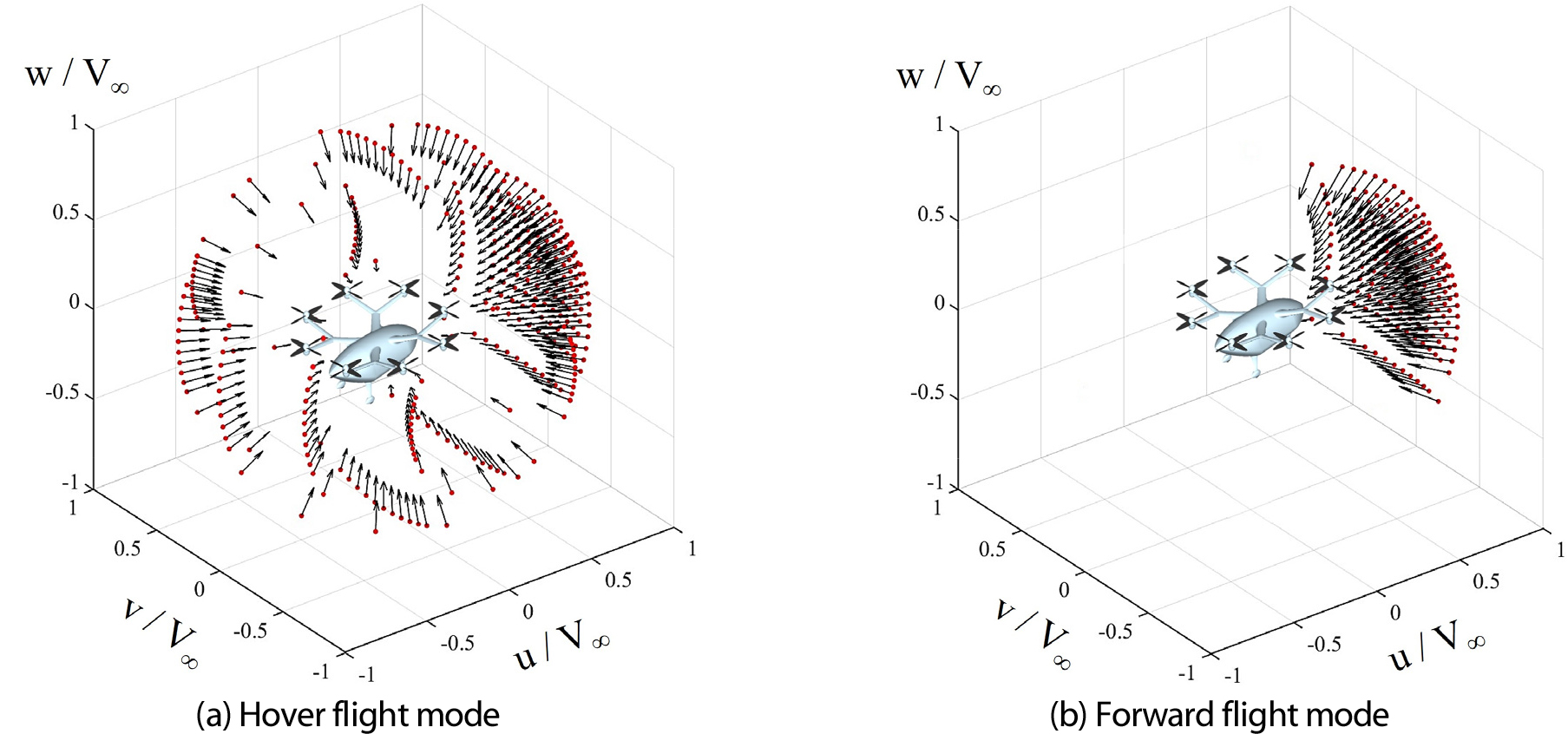
효율적인 공력 DB 구축을 위해 UAM 비행체의 현실적인 운용 조건을 고려하여 Fig. 5와 같이 제자리 비행 모드와 전진 비행 모드로 구분하여 생성하였다[17]. 제자리 비행 모드에서는 이착륙 시 측, 배풍과 같이 전방위에서 불어들어오는 바람을 고려하여 받음각(angle of attack, AOA)과 옆미끄럼각(sideslip angle, AOS)을 전범위에 대해 대응되도록 구성하였다. 전진 비행 모드에서는 순항 비행 중 예상되는 항공기 자세와 비행 조건을 반영하여 제한된 받음각과 옆미끄럼각을 선정하였다.
3.2 공력 DB 구축 범위
데이터가 탑재되는 공력 DB 구축점(독립변수)은 UAM 비행체의 비행 특성, 요구도와 임무형상을 반영하여 범위와 간격 등을 선정하였으며, Table 4에 나타내었다. 기본적인 독립변수는 속도, 받음각, 옆미끄럼각으로 구성되어있으며, 비행체 전 운용 영역에서 마하수가 최대 약 0.1 수준으로 공력 계수에 대한 압축성 효과의 영향은 미미하다고 판단하여 독립변수에서 마하수를 제외하였다. 또한, 비행체의 최대 운용고도가 약 360 m로 고도에 따른 레이놀즈수의 변화는 비행 속도에 따른 변화에 비해 크지 않다고 판단하여 속도를 레이놀즈수를 대신하여 독립변수로 선정하였다. 추가로, 프로펠러 DB의 경우 프로펠러 회전속도를 추가하였다. 전통적인 고정익 항공기에 장착된 추진용 프로펠러의 경우 상사성을 가정하여 추력계수와 토크계수를 전진비(advance ratio)에 대한 함수로 고려하고, 이에 따라 프로펠러 성능 DB의 독립변수를 전진속도와 회전속도 대신 전진비 하나로 구성하기도 한다. 본 연구에서 고려하는 멀티콥터형 비행체의 프로펠러의 경우, 모든 방향의 유입류에 대하여 기체 고정 좌표계 기준으로 도출된 프로펠러의 6분력이 전통적인 프로펠러 성능 곡선과 같이 전진비에 대한 상사성을 가진다고 보장할 수 없기 때문에 본 비행체의 프로펠러 DB의 독립변수는 유입류 방향 외에 비행체 비행 속도와 프로펠러 회전속도 두 개를 모두 갖는 형태로 구성하였다.
Table 4.
Range and values of independent variables of aerodynamic DB
속도 범위는 임무형상에 기반하여 상승 및 하강속도(1.5 m/s), 순항 속도(25 m/s)를 기준으로 하고, 최저속도(0 m/s, 제자리 비행)와 최고속도(35 m/s)로 선정하였다. UAM 비행체는 도심에서 운용되므로 빌딩풍 및 도심풍의 영향과 데이터 내삽의 안정성을 고려하여 10, 15 m/s를 DB 구축점으로 추가 선정하였다. 받음각 및 옆미끄럼각은 -30°과 30°를 기본 범위의 경계로 설정하고, -20°와 20° 사이는 4° 간격으로 데이터 구축점을 정의하였다. 제자리 비행 모드에서는 모든 방향으로부터의 도심풍을 고려하여 기본 각도 밖의 범위에서 전 방위각에 대해 30° 간격으로 각도를 추가하였다. 프로펠러 회전속도는 형상 도출 시 예측된 운용 회전속도를 기준으로 총 6개의 회전속도를 선정하였다.
3.3 공력 DB 구축 도구
기체 6분력 계수와 동미계수를 획득하기 위해 상용 CFD 소프트웨어인 STAR-CCM+ v15.06를 사용하여 RANS 기반의 유동 해석을 수행하였다[18]. 프로펠러 DB는 깃요소 운동량 이론 기반의 인하우스 코드인 improved BEMT[19]를 사용하여 해석을 수행하였다. 해석 조건은 임무형상에 따라 최대 운용 고도가 360 m임을 감안할 때, 지상에서부터 최대 운용 고도까지의 대기 밀도와 온도 범위 내에서는 레이놀즈수와 마하수 변화에 의한 비행체 공력 계수 변화는 매우 미미하다고 판단하여 전 영역에 대하여 모든 공력해석을 표준 대기 조건에서 수행하고 공력 계수를 산출하여 적용하였다.
3.3.1 기체 6분력 해석
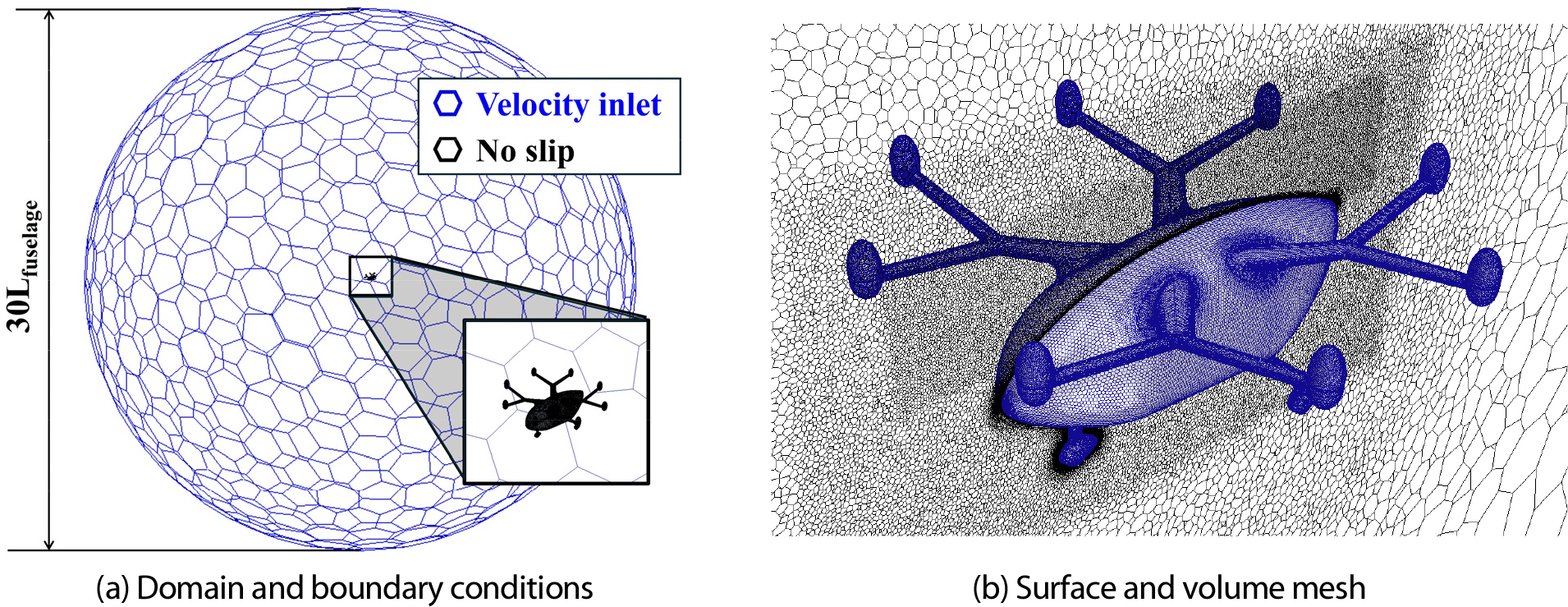
해석 격자는 STAR-CCM+에 탑재된 격자 생성 도구를 사용하여 다면체(polyhedral) 및 프리즘 격자로 구성된 비정렬 혼합 격자계를 생성하였다. 계산 영역은 Fig. 6(a)과 같이 기체 중심을 기준으로 동체 길이의 약 30배를 직경으로 갖는 구형으로 정의하였으며, 경계조건으로 velocity inlet을 부여하였다. 저속 영역은 wall resolved 격자(y+ ~ 1.5), 고속 영역의 경우 wall function 격자(y+ ~ 100)를 사용하였다. 전체 유동 조건의 최대 마하수가 약 0.1 수준임을 고려하여 비압축성 유동 해석을 수행하였으며, 시간 효율적인 DB 구축을 위해 정상상태 해석을 수행하였다. 수치 기법으로는 공간에 대해 2차 정확도의 풍상차분법을 사용하고, 난류 모델은 k-ω SST를 적용하였다. 공력 성능은 3,000 iterations 해석 후 마지막 1,000 iterations 구간의 평균 공력 성능을 획득하였다.
격자 수렴성 평가를 위해 조밀도에 따라 총 네 가지의 격자를 생성하고, 순항 속도 조건인 25 m/s에 대해 해석을 수행하였다. 실제 데이터 구축에 사용한 해석 자원인 Intel Xeon Platinum 9242 2.30Ghz CPU 96코어를 사용하여 병렬 계산을 수행하였다. Table 5는 격자 조밀도에 따른 해석 시간 및 결과를 나타낸다. 멀티콥터형 비행체는 형상 구성요소들 대부분이 무딘 물체(blunt body) 형상으로 이루어져 유동 박리 등에 따라 정상 유동 해석의 수렴성이 저하되고, iteration에 따라 공력 값이 진동하는 경향 또한 상대적으로 크게 나타난다. 공력 DB 구축 관점에서 허용 가능한 수준 내에서 값이 진동하여 구간 평균을 통해 획득한 공력 데이터들이 속도, 받음각, 미끄럼각에 따른 성능의 변화를 적절하게 모사하면서도 시간 효율성을 종합적으로 고려하여 약 1,000 만개 수준의 medium 격자를 DB 구축을 위한 해석용 격자로 최종 선정하였으며, Fig. 6(b)와 같다.
Table 5.
Results of grid convergence test
3.3.2 동미계수 해석
일반적인 항공기의 동미계수 예측은 주로 준경험적(semi-empirical) 방법이나 풍동 실험을 통해 획득한다[20,21]. 대표적인 준경험식 기반 동미계수 예측 프로그램으로는 Digital DATCOM[22]과 Part I의 리프트 크루즈형 비행체 동미계수 DB 구축에 사용된 AVL(athena vortex lattice)[23] 등을 들 수 있다. 하지만 리프트 크루즈형 비행체와 달리 멀티콥터형 비행체의 경우 양력면이 없기 때문에 2차원 패널 해석 방법론 자체의 한계가 존재하며, 준경험적 방법 또한 주로 항공기 주날개와 같은 양력면의 파라미터에 의존하므로 멀티콥터형 비행체에 적용은 제한된다. 따라서 멀티콥터형 비행체의 동미계수는 STAR-CCM+ v15.06에서 제공하는 이동 참조 프레임(moving reference frame, MRF) 기법을 활용하여 획득하였다.
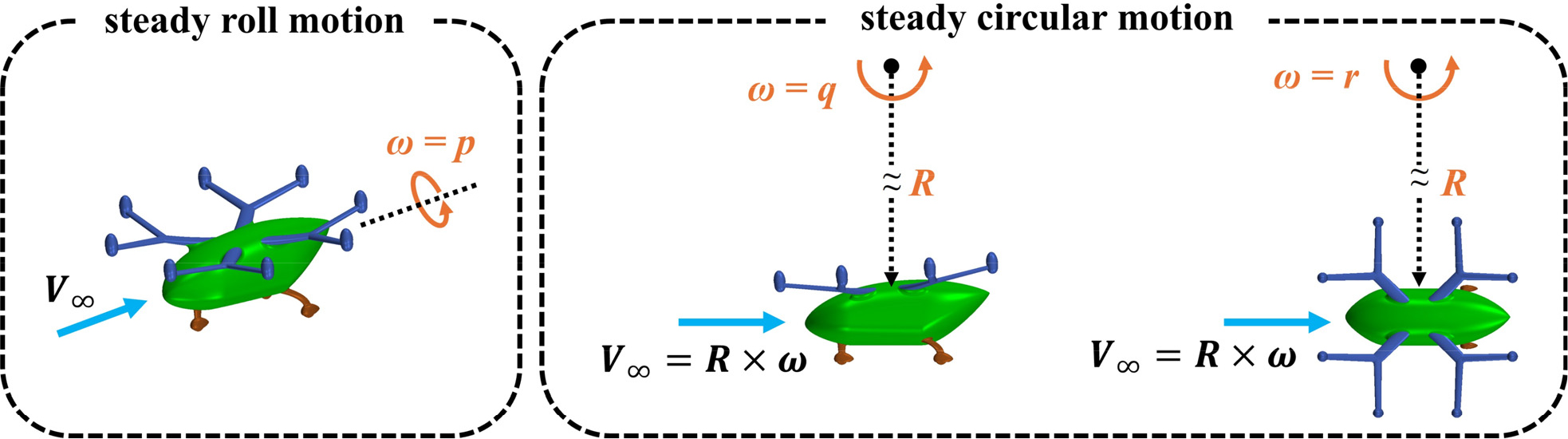
동미계수는 무차원된 자세각 변화율에 대한 공력 계수의 미분을 나타내며, 본 연구에서는 롤, 피치, 요 변화율을 고려한다. 항공기의 롤, 피치, 요 운동에 따른 동미계수 산출을 위해 적용한 해석의 개념은 Fig. 7과 같으며, 등각속도 롤 회전(steady roll motion) 및 등속 원운동(steady circular motion)을 모사하였다. 롤 회전 운동은 기체 노즈를 지나는 동체 좌표계의 x축을 회전축으로 하여 일정한 각속도로 회전하는 조건에 대해 해석을 수행하였으며, 등속 원운동 해석의 경우 기체 외부에 위치한 회전 중심으로부터 기체 중심까지의 거리와 각속도의 곱이 자유류 속도가 되는 조건에 대해 해석을 수행하였다. 회전 각속도는 롤, 피치, 요 변화율을 나타내며, 0.01 rad/s의 크기로 설정하였다.
기체 6분력 해석과 동일한 격자를 사용하였으며, Fig. 8은 등속 원운동에 대한 MRF 해석의 예시 결과로 비행체 주위에 회전 운동의 효과가 적절하게 모사되었음을 확인할 수 있다. 실제 기체 DB에 탑재되는 동미계수 DB 값은 무차원화된 자세각 변화율에 대해 등속 회전 운동 해석에 의해 발생하는 기체 6분력 계수의 변화에 대한 수치 미분을 통해 획득하며, 식 (4)와 같다.
동미계수에 의한 비행체의 공력 변화량은 저속 비행 영역에서 프로펠러 회전수 제어에 의한 힘의 크기에 비해 미소하기 때문에, 전진 비행 모드에 대해서만 동미계수 DB를 구축하였다. 또한, 속도 및 받음각과 옆미끄럼각에 변화에 따른 동미계수 변화는 미미하다고 가정하고, 대표 속도(15 m/s)에 대해 받음각 0°, 옆미끄럼각 0° 조건에 대한 롤, 피치, 요 운동에 대한 해석을 수행하였다. 총 18개의 동미계수 중 Table 6과 같이 일반적으로 값이 커 운동 모델링 시 주로 고려하는 대표적인 동미계수 8개를 선정하여 DB를 구축하였다.
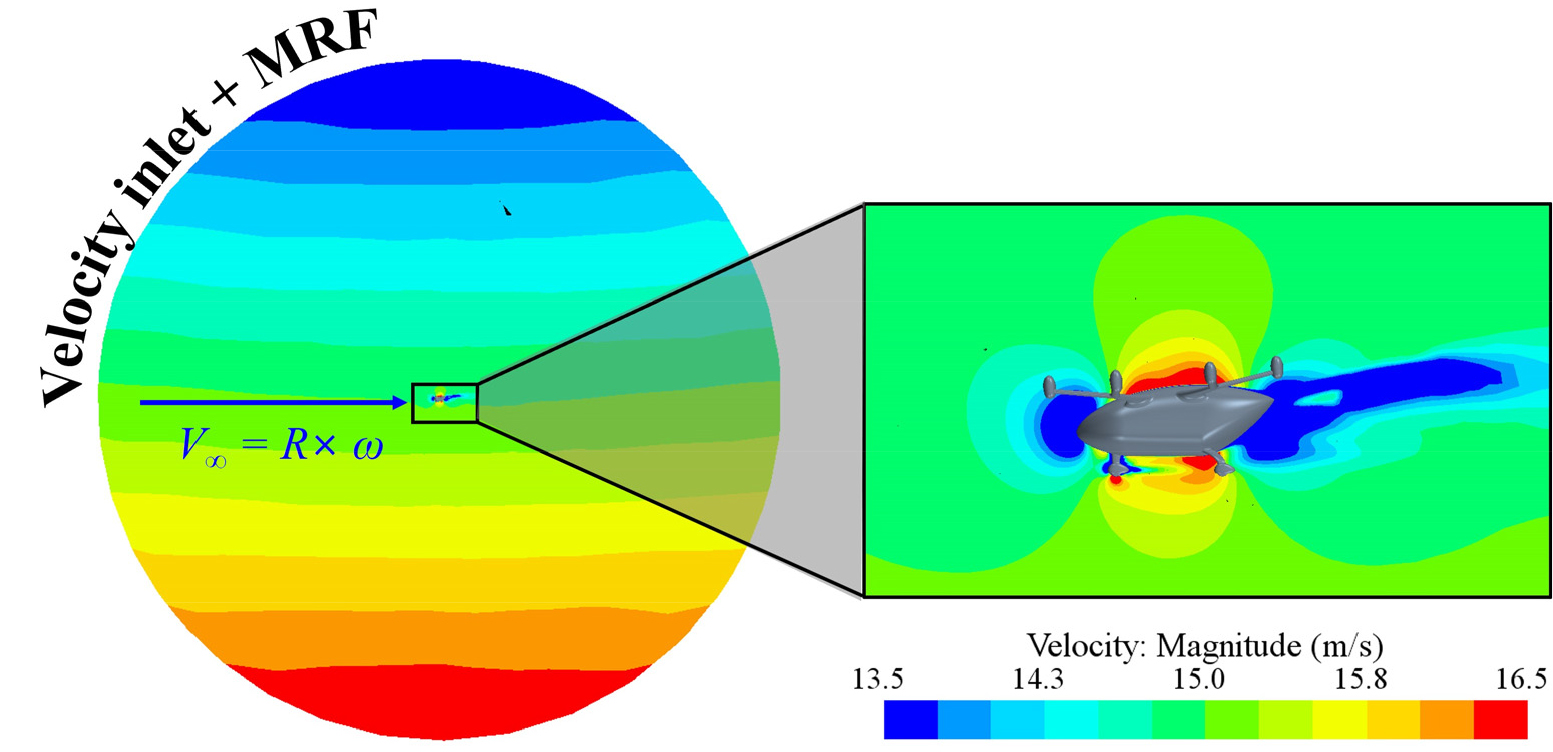
Table 6.
Results of dynamic derivatives in stability axis
| Roll motion | Pitch motion | Yaw motion | |||||
| CFy,p | CMx,p | CMz,p | CFz,q | CMy,q | CFy,r | CMx,r | CMz,r |
| -1.1061 | 0.7165 | -1.5368 | 3.8647 | -1.2715 | 0.16034 | -1.0894 | -5.3152 |
3.3.3 프로펠러 성능 해석
기본적인 BEMT 기법은 유입류 방향이 프로펠러 회전축과 일치하여 축대칭인 경우에만 해석의 타당성이 보장되기 때문에 프로펠러 성능 DB 구축에서와 같이 전방위에 대한 해석에 한계가 존재한다. 본 연구진이 보유한 improved BEMT[19]는 비대칭 스트림 튜브를 가정하여 프로펠러의 틸트각 및 장착각 등을 고려한 프로펠러 6분력 산출이 가능하고, 다수의 벤치마크 문제를 통해 기법의 정확성과 실용성을 검증한 바 있다. 또한, 기존 운동량 이론에 위배되는 하강 비행의 경우는 유도속도를 모멘텀 이론에 기반한 이론식[24]과 피팅식[25]으로 계산을 단순화하여 성능을 획득하였으며, 제자리 비행과 같이 축방향 유입류가 없는 경우 발생하는 특이점 문제를 제거하기 위해 축 방향 유도속도 비를 회전 방향 속도로 재정의 후 정식화하여 성능을 획득하였다.
4. 공력 DB 구축 결과 및 평가
4.1 공력 DB 구축 결과
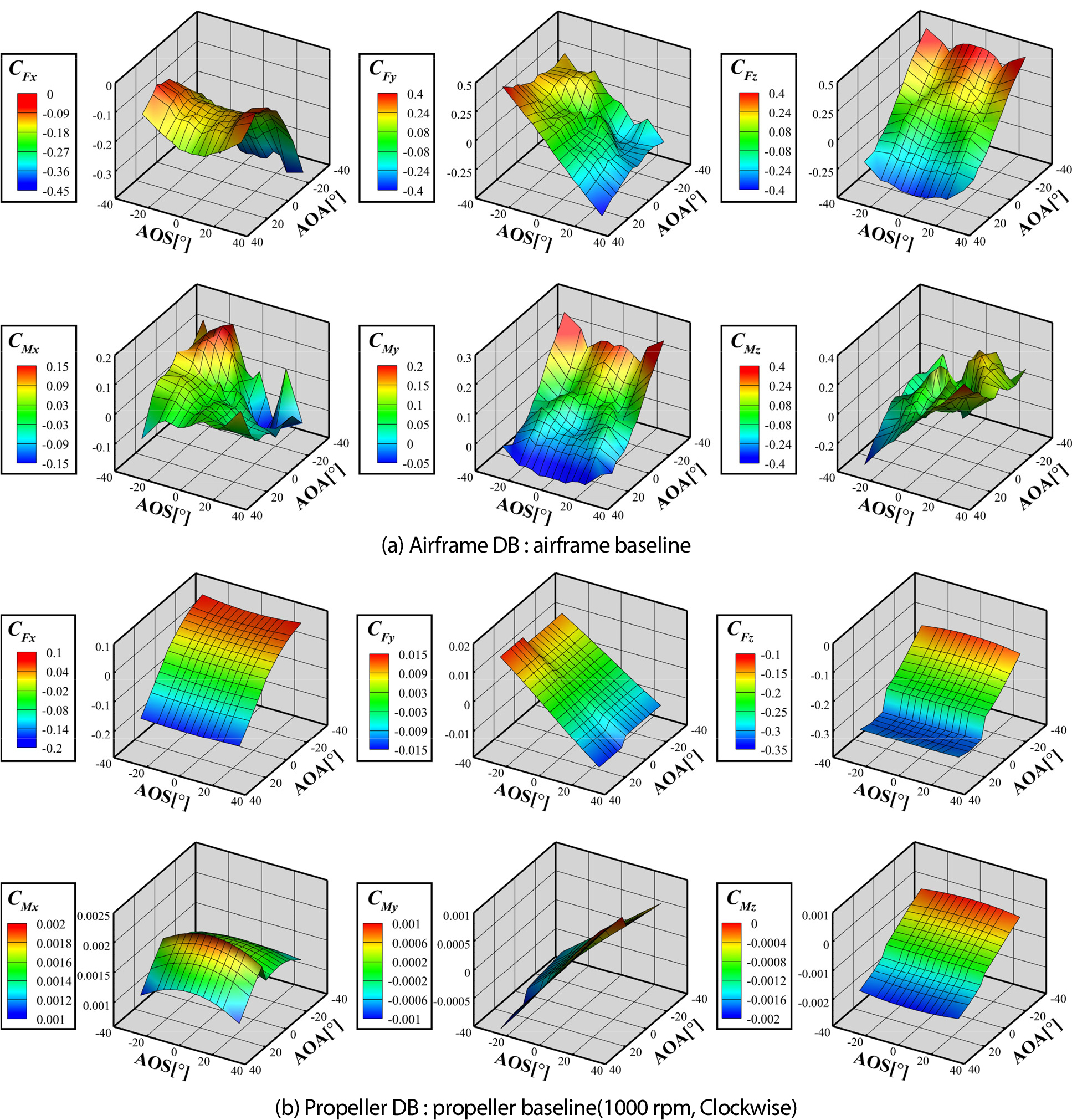
공력 DB 구축을 위해 총 23,000여개의 구축점에 대한 공력 데이터를 확보하였다. 기체 DB의 경우, 상승/하강/배풍조건 등과 형상의 대칭성에 의해 중복되는 유동 조건들을 식별하여 제외하고 실제 필요한 640 케이스에 대해 RANS 해석을 수행하였다. 프로펠러 DB의 경우, 신속 해석 기법을 사용하여 전 구축점에 대해 시간 효율적으로 계산 결과를 획득하였다. 일부 결과의 예로, 완성된 공력 DB 중 전진 비행 모드의 순항 속도에서의 기체 6분력 및 프로펠러 성능 해석 결과를 Fig. 9에 나타내었다.
4.2 공력 DB 평가
CBM 개념을 적용한 공력 DB의 정확도 및 신뢰성을 평가하기 위해 특정 비행 조건을 선정하여 모든 프로펠러를 포함한 전기체 공력해석을 수행하였다. 평가 조건은 Table 7과 같으며, 전진 비행 모드의 경우 순항 속도에서 총 6개의 받음각 조건을 선정하였으며, 제자리 비행 모드의 경우 제자리 비행과 1.5 m/s의 상승, 하강비행 총 3개의 조건을 선정하였다. 각 조건에 대해 수직력, 축력, 피칭모멘트에 대한 평가를 진행하였다.
Table 7.
Flow conditions for evaluation of aerodynamic DB
| Hover flight mode | Forward flight mode | |
| Velocity[m/s] | 0 / 1.5 | 25 |
| Angle of attack[°] | -90(climb) / 90(descent) | -8 ~ 12(△=4°) |
| Rotational speed[rpm] | 1000 | 1000 |
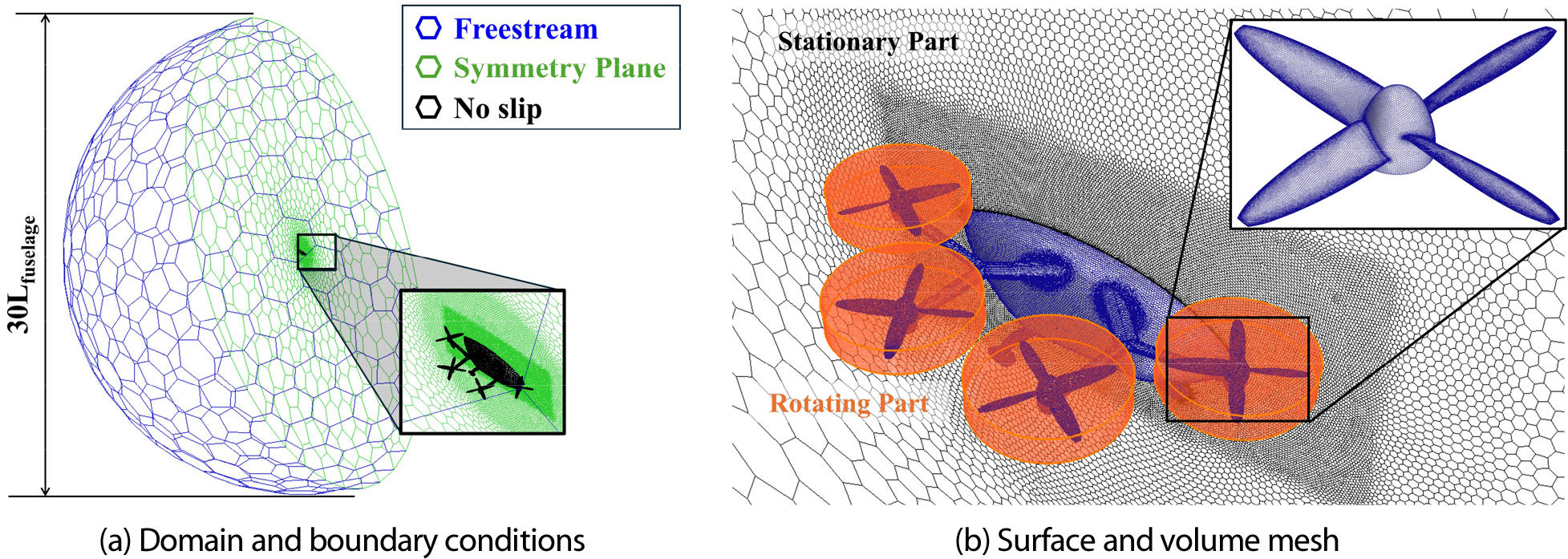
프로펠러 회전을 모사하기 위해 슬라이딩 메쉬 기법을 사용하였으며, 비정상 압축성 유동 해석을 수행하였다. 형상의 대칭성과 조건을 고려하여 좌우 대칭면을 기준으로 전체 모델의 절반(half geometry)을 고려하였다. Fig. 10은 해석에 사용된 격자와 경계조건을 나타내며, 도메인은 기체 해석 영역의 절반 크기이고, 대칭면에는 대칭 경계 조건을 부여하였다. 또한 프로펠러를 포함하는 4개의 회전 격자 영역과 그 외의 정지 격자 영역으로 분할하여 구성하였다. 전진 비행 모드 평가 해석에는 wall function 격자(y+ ~ 100)를 사용하였고, 제자리 비행 모드 평가 해석에는 wall resolved 격자(y+ ~ 2)를 사용하여 각각 약 3,300만 개와 3,600만 개의 격자로 구성하였다. 해석 시간 절감을 위해 각 프로펠러 영역에 MRF을 사용한 정상 해석을 우선 수행하여 유동을 형성시킨 후, 이를 초기 조건으로하여 SMM 해석을 수행하였다.
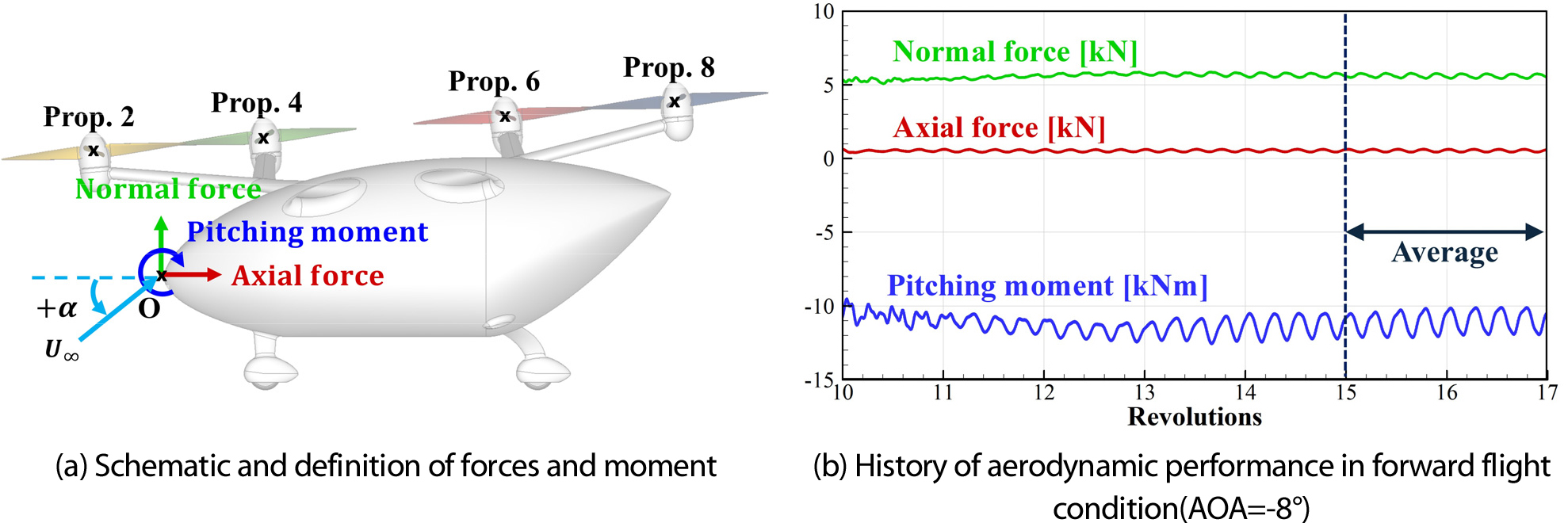
수치 기법으로는 시간과 공간에 대해 2차 정확도의 차분법을 사용하였고, 난류 모델은 k-ω SST를 적용하였다. 시간 간격은 블레이드가 방위각(azimuth angle) 3°만큼 회전하는 시간으로 설정하였으며, 각 시간 전진을 위한 내부 반복계산 횟수는 수렴성을 고려하여 전진 비행은 25회, 제자리 비행은 35회로 설정하였다. Fig. 11(a)는 분석에 적용된 수직력, 축력, 피칭모멘트의 정의를 보여주며, Fig. 11(b)는 전진 비행 모드의 받음각 -8° 조건에서 프로펠러 회전수에 따른 전기체 공력 성능의 시간 이력을 나타낸다. 전진 비행 모드에서는 15 회전 이후 유동장과 공력 성능 모두 충분히 평형 상태로 수렴한 값을 획득할 수 있음을 확인할 수 있으며, 평균 공력 성능 획득을 위해 추가 2회전 해석 후 해당 구간에 대한 시간 평균값을 획득하였다. 제자리 비행 모드에서는 수렴성 확보를 위해 총 20회전 해석을 수행하고, 마지막 2회전 구간의 평균값을 획득하여 평가를 진행하였다.
4.2.1 전진 비행 모드
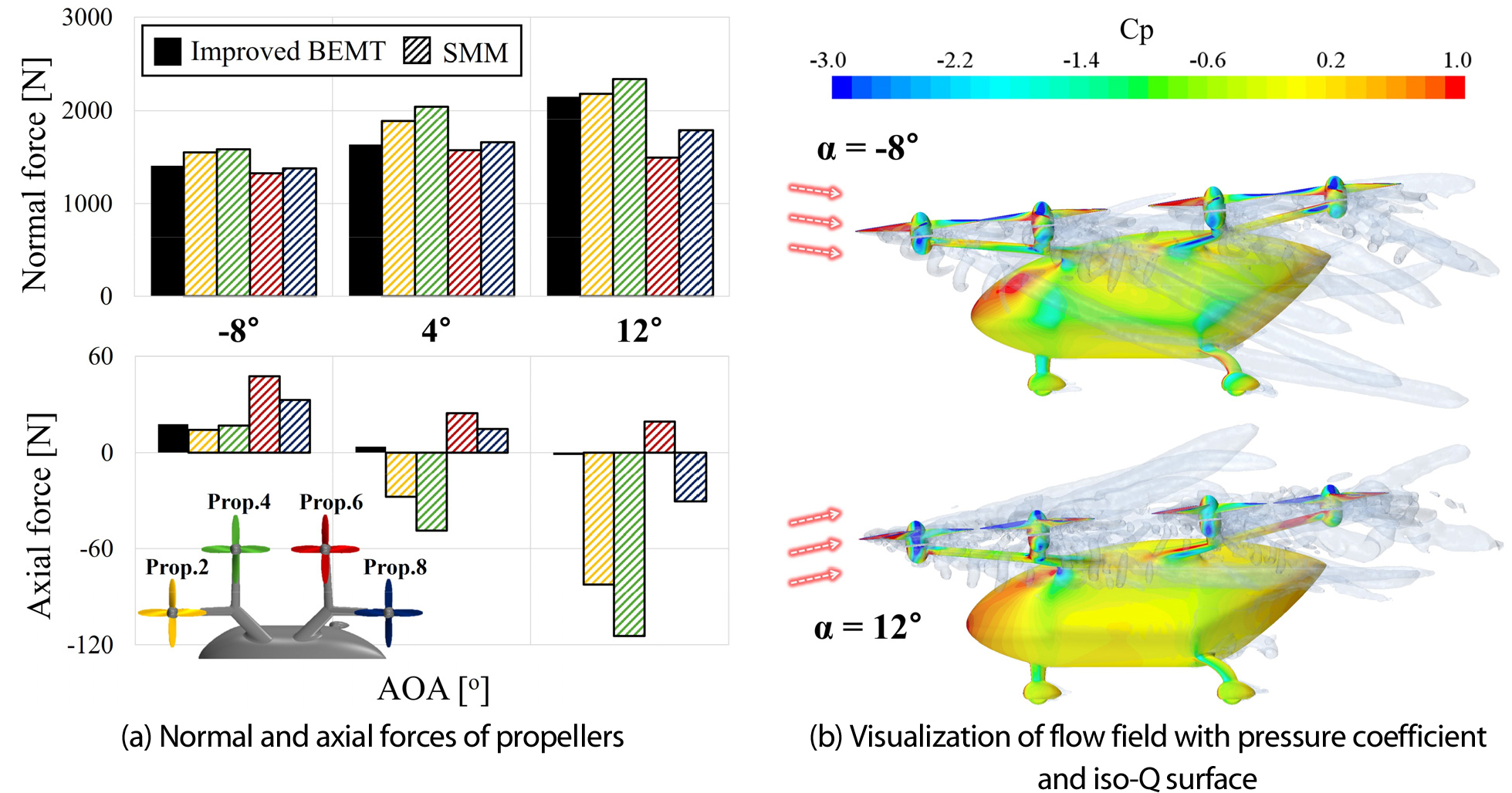
구축한 공력 DB로부터 CBM 개념을 적용하여 계산한 비행체의 공력과 SMM 기반의 전기체 해석 결과를 비교하여 Fig. 12에 제시하였다. 양력면이 없는 멀티콥터형 비행체의 형상적 특징에 의해 수직력과 피칭모멘트의 경우 기체(Airframe) 대비 프로펠러(Propeller)에서 발생하는 공력 값이 지배적이다. 그로 인해 각 기법별 전기체(Total)의 공력 성능은 전반적으로 프로펠러의 성능 변화 경향성과 거의 동일한 것을 확인할 수 있다.
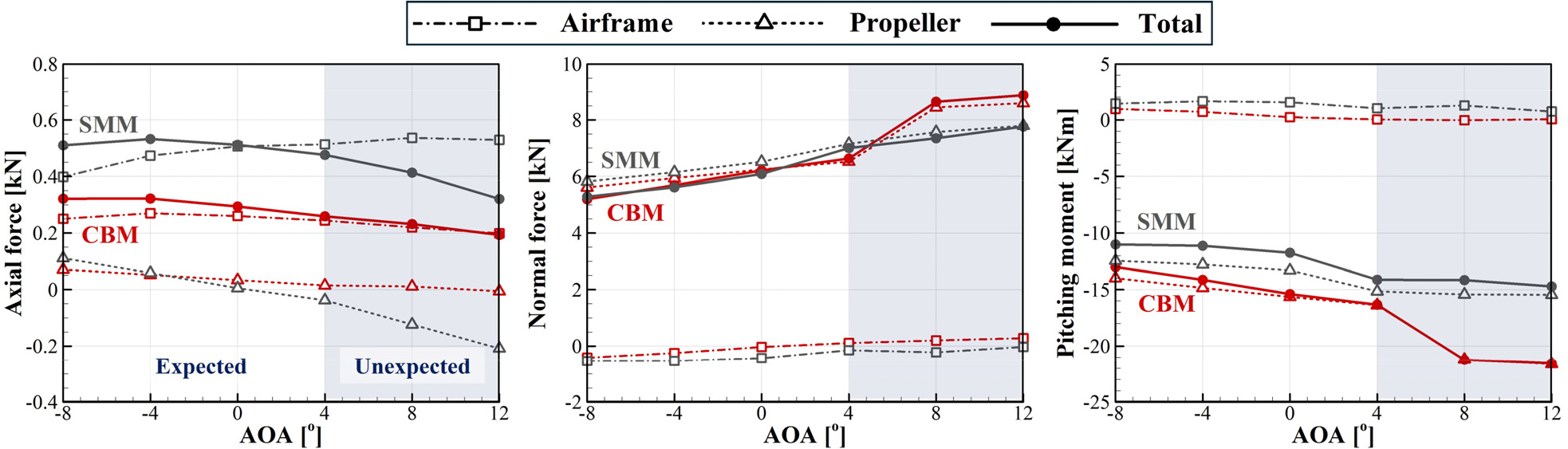
수직력의 경우 받음각 4° 이하에서 CBM과 SMM의 결과 차이가 5% 미만이지만, 4° 이후에서는 차이가 최대 27% 수준까지 증가함을 볼 수 있다. 이는 프로펠러들이 장착각 5°를 가지고 있기 때문에, 받음각 5° 이상의 조건에서는 프로펠러 디스크면에 대한 유입류의 방향인 자유류 유동이 역으로 유입되는 상황에 해당한다. 따라서 프로펠러 DB 구축에 사용한 BEMT 계산 시 수직방향 유입류가 음수가 되어, 적용된 가정과 이론들이 위배된다. 현재 사용 중인 improved BEMT에서는 하강 속도에 따른 프로펠러의 유도속도 이론식을 피팅하여 안정적인 계산이 가능하도록 구현하였으나 정확도 측면에서는 일정 수준의 오차가 발생하며, BEMT 해석자가 프로펠러 추력을 상당 수준 과예측하는 특성을 보임을 알 수 있다. 또한 피칭모멘트의 경우 CBM에서는 단독 프로펠러에 대한 결과를 적용함에 따라 같은 회전 방향과 회전속도를 갖는 모든 프로펠러에서 동일한 힘과 모멘트가 발생한다고 가정한다. 하지만 Fig. 13(a)의 요소별 결과에서 알 수 있듯이 전기체 해석에서는 프로펠러-기체 간의 간섭과 프로펠러-프로펠러 간 간섭으로 인해 단독 프로펠러 대비 네 개의 프로펠러 공력 값에 차이가 발생한다. 원인 분석을 위하여 자유류 속도로 무차원화한 표면 압력 계수와 Q-criterion을 통해 유동을 가시화하여 Fig. 13(b)에 나타내었다. 받음각이 증가할수록 전방에 위치한 프로펠러(Prop. 2&4)의 후류가 후방에 위치한 프로펠러(Prop. 6&8)에 직접적인 영향을 주게되어 프로펠러 간 공력 차이가 점차 증가하는 것을 확인할 수 있다. 이로 인하여 받음각이 증가할수록 후방 프로펠러에서 발생하는 수직력 저하로 기체 노즈점 기준 피칭모멘트가 증가하여 SMM 결과와 CBM의 차이가 증가한다. 하지만 순항 시에는 음의 받음각 조건의 자세각으로 비행하기 때문에, 4° 이상의 자세각으로 수평 비행할 가능성이 없다. Fig. 12에 음영으로 표시된 부분은 비행체가 임무형상에 따라 비행할 경우 천이 상승 및 전진비행 중에는 예상되지 않는 비행 조건 영역(Unexpected)을 나타내며, 예상 비행 영역(Expected) 내에서는 공력 DB의 적절한 신뢰성을 보여 시뮬레이터 탑재를 위한 활용성도 확보하고 있음을 확인할 수 있다. 다만 착륙을 위해 하강하면서 접근 비행하는 구간에서는 높은 받음각 조건에서 비행할 가능성이 존재하며, 이 경우에는 구축한 공력 DB의 정확도가 다소 저하될 가능성이 있을 뿐 아니라 실제 상황에서는 전방 프로펠러의 후류가 후방 프로펠러에 유입되거나 간섭이 크게 발생하여 진동이나 비행 안정성, 탑승감, 소음 등의 문제가 증가할 가능성이 높을 것으로 예상된다. 결과 비교를 통한 DB 검토로부터 기체-프로펠러 간 공력 간섭이나 전방 프로펠러 후류에 의한 후방 프로펠러 간섭에 의한 프로펠러 성능 변화를 추가적인 공력 DB의 구성요소로 추가함으로써 DB의 정확도의 향상과 고도화의 가능성을 확인하였다.
4.2.2 제자리 비행 모드
Fig. 14(a)는 CBM 개념을 적용하여 공력 DB로부터 획득한 제자리 비행 모드에서의 공력 결과와 SMM 해석 결과 비교를 보여주며, Fig. 14(b)는 프로펠러 블레이드 끝단 속도로 무차원화한 표면 압력 계수와 Q-criterion을 사용하여 유동을 가시화하여 나타내었다. 제자리 비행 조건에서는 비행 속도가 0이므로 CBM에서의 기체 공력 값은 모두 0이며, 상승 및 하강 조건에서는 낮은 동압으로 인해 프로펠러 공력 값에 비해 상대적으로 매우 작게 예측되었다. 하지만 SMM 해석 결과에서는, Fig. 14(b)와 같이 프로펠러 회전으로 인하여 프로펠러 하단에 위치한 지지대의 윗면에 고압 영역이 형성되어 음의 수직력인 다운포스가 발생함을 알 수 있다. 동일한 이유로 상승 및 하강 조건에서도 CBM 대비 SMM 결과가 더 큰 음의 수직력을 가지는 것으로 확인된다. 또한 동체 자세각은 0°인 조건이지만 프로펠러 장착각(Fig. 11(a))으로 인해 프로펠러 후류 방향의 영향으로 동체에 양의 축력이 함께 발생한다. 프로펠러 성능의 경우 프로펠러의 회전에 의해 비행체의 상승, 하강 속도 대비 빠른 속도의 강한 내리흐름(downwash)이 유도되고, 그로 인해 프로펠러의 후류가 Fig. 14(b)와 같이 프로펠러의 디스크면에 수직 아래로 강하게 형성된다. 앞선 전진 비행 평가의 경우와 비교하였을 때, 전방 프로펠러의 후류가 후방 프로펠러에 미치는 영향이 적어 SMM 결과에서도 4개의 프로펠러에서 발생하는 수직력 차이가 1% 미만으로 나타나, 동일한 성능을 갖는 것으로 가정하는 CBM과 유사한 경향성을 보인다고 판단 가능하다. 결과적으로 CBM과 SMM 결과 간의 수직력과 축력의 결과 차이는 제자리 비행과 상승 비행(climb) 조건에서는 약 25% 수준의 오차를 보였으며, 하강 비행(descent) 조건에서는 약 65% 수준으로 차이가 크게 증가함을 확인할 수 있다. 이는 앞서 논의한 바와 같이 하강 비행에서는 역방향의 유입속도 조건에 해당하여 BEMT의 예측도가 저하되어 상대적으로 더 큰 차이가 발생한 것으로 분석되며, 전진 비행 조건 대비 BEMT의 추력의 과예측 경향이 더 크게 나타나는 것으로 판단할 수 있다. 특히, 결과 비교를 통해 제자리 비행 모드에서 대부분의 차이는 프로펠러 성능에서 발생함을 알 수 있다. BEMT 해석을 기반으로 구축한 현재의 프로펠러 DB의 정확도를 높은 충실도의 해석기법을 적용하여 개선함으로써 DB의 정확도 향상과 고도화의 가능성을 확인하였다.
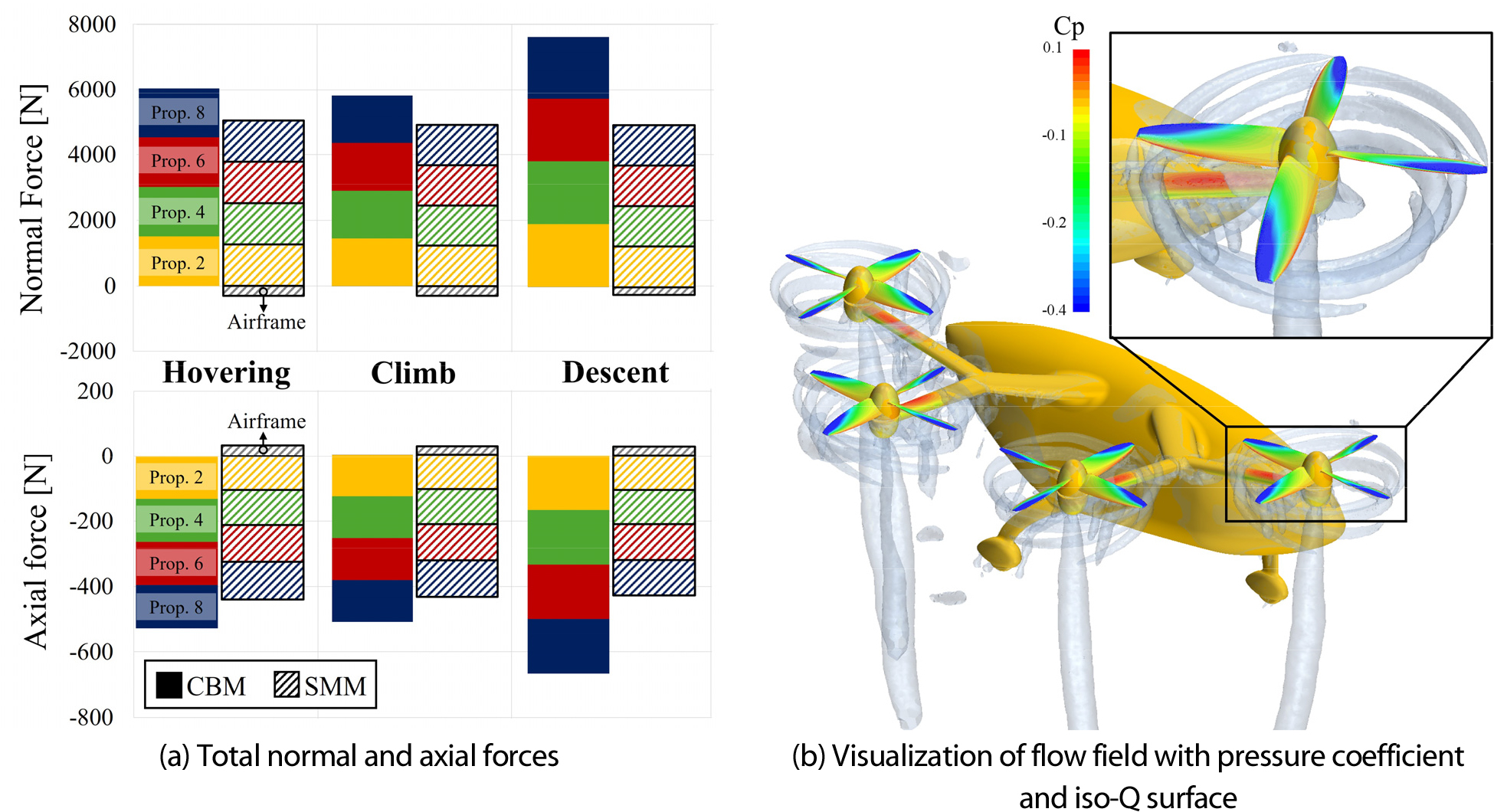
Table 8은 제자리 비행 모드 중 하강 비행 조건에 대한 해석자별 소요시간을 나타낸다. 앞선 전진 및 제자리 비행 모드의 결과 비교에서는 CBM과 SMM이 정량적인 차이를 다소 보이긴 하지만, 평가 조건들에 대해 공력 값들의 적절한 경향성과 합리적인 수준의 정확도를 제공한다고 볼 수 있다. 데이터 획득에 사용된 소요 자원 및 시간을 고려한다면 합리적인 정확도 수준에서 넓은 범위의 비행 조건들에 대해 공력 성능의 변화 경향성을 적절하게 예측하는 것이 중요한 시뮬레이터 개발 초기의 공력 DB 구축 관점에서는 CBM 기반의 공력 DB 구축이 유용하며 활용도가 충분히 높음을 확인할 수 있다.
5. 결 론
본 연구에서는 UAM 비행 시뮬레이터에 활용 가능한 CBM 기반의 공력 DB 구축 방안에 대해 제시하고, DB의 신뢰도 및 활용 가능성에 대해 평가하였다. 기체 6분력 계수 및 동미계수를 포함하는 기체 DB와 프로펠러 6분력 계수가 포함된 프로펠러 DB로 분리하여 구성하였으며, 효율적인 자료 생성과 구성을 위해 비행체 운용조건을 전진 및 제자리 비행 모드로 구분하여 구축하였다. 기체 6분력 해석과 동미계수는 RANS 기반의 전산유체역학 해석을 수행하였고, 프로펠러 DB는 전방위 유동 조건에 대한 해석이 가능하도록 개선된 깃요소 운동량 이론 기반의 신속 해석 기법인 improved BEMT를 활용하여 구축하였다.
공력 DB의 신뢰도 및 활용 가능성에 대해 평가하기 위해 특정 비행 조건들에 대해 슬라이딩 메쉬 기법을 활용한 전기체 해석을 수행하였다. 전진 비행 모드 평가에서는 프로펠러 장착각으로 인해 받음각 4° 이후부터 프로펠러 디스크 면에 자유류 유동이 역으로 유입되어 BEMT 해석자가 가지는 예측성 저하에 의해 SMM 결과와의 차이가 증가하였다. 또한, 받음각이 증가할수록 전방에 위치한 프로펠러의 후류가 후방에 위치한 프로펠러에 직접적인 영향을 미치게되어 프로펠러 간의 공력 간섭을 무시한 CBM의 예측성이 저하되었다. 하지만 순항 시 비행체가 실제 운용될 받음각 영역 내에서는 SMM와 CBM의 결과 차이가 수직력 기준 5% 미만으로 공력 DB의 적절한 신뢰성을 가짐을 확인하였다. 제자리 비행 모드 평가에서는 전진 비행 모드 대비 프로펠러의 후류가 다른 프로펠러에 미치는 영향이 적어지게 되어, 프로펠러 간의 추력 차이가 1% 미만으로 SMM와 CBM이 동일한 경향성을 보였다. 다만, CBM의 경우 프로펠러와 기체와의 공력 간섭으로 인해 야기되는 기체의 수직력과 축력의 변화를 예측하는 것에 한계를 확인하였다. 결과적으로, CBM의 경우 넓은 범위의 비행 조건들에 대해 공력 성능의 변화 경향성을 적절하게 예측하며, 데이터를 획득하는데 사용된 소요 자원 및 시간을 고려한다면 초기 비행 시뮬레이터 설계 시 높은 활용도를 보였다. 추가로, 결과 비교를 통해 기체-프로펠러 간, 프로펠러 간 공력 간섭에 대한 성능 변화를 공력 DB의 구성요소로 추가함으로 DB의 정확도 향상과 고도화 가능성을 확인하였다.
