

1. 서 론
2.수치기법
2.1 해석조건 및 격자
2.2 POD 기법
2.3 LSTM 기반 유동 추정기 설계
2.4 최적 센서 선정 기법
2.5 폐루프 제어
3. 결과 분석
3.1 유동 제어 전 결과
3.2 유동 추정기 성능 검증
3.3 폐루프 유동제어 결과
4. 결 론
1. 서 론
능동 유동 제어(active flow control)는 질량유량의 추가, 운동량 또는 운동에너지의 제공을 통해 박리와 와류 등 비정상·비선형 유동 구조를 능동적으로 조정해 필요한 유동 특성을 확보하는 기술이며, 항력을 줄이고 양력을 높이며 소음을 저감하여 항공우주 비행체의 공력 성능을 향상시키는 주요한 방법이다. 특히 항공기 표면의 박리 유동에서는 통상 압력항력이 커지고 전압 손실이 커지므로, 효과적인 제어는 운송 분야에서 탑재 하중 증가, 활주 거리 단축, 연료 소모·배출 저감 등 직접적 이익으로 이어진다[1]. 또한 박리에 의한 진동을 완화하고 비대칭 유동에 따른 불필요한 힘·롤 모멘트를 줄여 안정된 비행 상태를 유지하는 데 기여할 수 있다. 추가적인 운동량을 제공하는 능동 유동 제어 방법에는 steady blowing, suction, pulsed jet, synthetic jet 등이 있으며, 이 중 합성 제트(synthetic jet)는 압전소자의 진동으로 운동량을 생성할 수 있는 ZNMF(Zero Net Mass Flow) 특성으로 외부 유체 저장·공급 장치가 필요 없고, 구조가 단순하며 소형·경량화에 유리하다.
초기 연구에서 Schubauer 등[2]은 층류 경계층 내 진동의 존재를 실험적으로 입증하였으며, 외란의 주파수·세기에 따라 천이가 유발·지연될 수 있음을 보여 유동 제어 가능성을 처음으로 제시하였다. Seifert 등[3]은 진동식 분사(oscillatory blowing)가 유동 박리 지연에 효과적임을 입증하였다. 이들은 압전의 ZNMF 액추에이터를 공진 주파수 대역에서 구동시킬 때, 양력 증대, 항력 저감, 후류 정돈으로 이어짐을 보였다. Smith 등[4]은 2차원 합성 제트 유동의 생성 및 발달 과정을 정리하며, 주파수·위상 설정이 전단층의 코히어런트(coherent) 구조 변화에 미치는 영향을 제시하였다.
합성 제트 기반 능동 유동 제어의 성능은 구동 위치와 더불어, 구동 주파수와 유동의 자연 주파수 간의 관계에 의해 크게 좌우된다는 점이 실험과 수치 연구에서 일관되게 보고되었다. Amitay 등[5,6]은 실속 조건에서 무차원 주파수 대역 (1)이 주기적 재부착을 유도하는 반면, 대역 (10)은 이득이 제한적임을 보였다. Raju 등[7]은 자연 유동이 전단층, 분리 버블, 후류의 세 자연 주파수를 가지는 것을 확인하였다. 합성 제트 제어 결과, 분리 버블의 주파수 부근의 구동이 박리 영역을 가장 크게 줄이고 양항비를 개선하는 반면, 전단층 주파수 부근의 고주파 구동은 박리를 악화시킬 수 있음을 설명했다. Tuck 과 Soria[8] 또한 저레이놀즈수 조건의 수중 실험을 통해 NACA 0015 앞전의 합성 제트를 적용하여 특정 주파수 범위에서 유동 제어 효과가 있음을 보였다. 이러한 연구 결과는 본 연구의 합성 제트 구동 및 주파수 대역 선택에 대한 근거를 제공하였다.
초기의 대부분 연구들은 합성 제트 구동 시 유동 구조의 변화와 와류 거동에 초점을 맞추었으며, 대부분 개루프 제어(open-loop control) 조건에서 수행되었다. 개루프 제어는 유동 조건 변화에 적응하지 못하고 구동을 지속해야 하므로 에너지 소모가 크다. 이러한 한계로, 합성 제트의 효과가 확인된 이후 폐루프 제어(closed-loop control)의 필요성이 제기되었다[1].
폐루프 제어기는 동역학 모델의 활용 유무에 따라 모델 기반 제어(Model-Based Control, MBC)와 비모델 제어(Model-Free Control, MFC)로 구분된다[9,10,11]. 모델 기반 제어는 고차원의 유동 정보를 저차원 동역학으로 모델링하는 축소 차원 모델(Reduced-Order Model, ROM)을 사용한다. 특히 적합 직교 분해(Proper Orthogonal Decomposition, POD)는 유동장의 지배적인 에너지 모드를 추출하여 저차원의 동역학 모델을 구성하며, 계산 효율성과 제어 성능을 동시에 확보할 수 있다[12]. POD 모드를 추정하여 능동 유동 제어기에 결합하기 위한 다양한 접근이 보고되었다. Seidel 등[13,14]은 선형 확률 추정(Linear Stochastic Estimation, LSE) 기반의 상태추정과 비례-미분(Proportional Derivative, PD) 제어기를 결합하여 NACA0015 익형의 폐루프 제어 프레임워크를 구현하였다. 이후 원형 실린더 제어 연구에서 인공신경망(ANN) 기반 상태 추정기가 LSE 대비 추정의 정확도와 강건성에서 더 우수함을 보고하였다[15]. Pinier 등[16]은 압력 신호와 POD 모드 간의 상관행렬을 활용하는 MLSM(Modified Linear Stochastic Measurement)기법과, 비례(Proportional) 제어기를 결합하여 NACA4412 익형의 실속을 지연시켰다. 이처럼 모델 기반 제어에는 유동의 상태를 실시간으로 재구성하는 유동 추정기 설계가 필수적이다. 유동 추정기는 비정상 상태의 분리 유동과 같은 비선형 특성을 정확히 포착하는 것이 요구되며, 이에 따라 시계열 예측 문제에 특화된 LSTM(Long Short-Term Memory) 네트워크가 유체·항공 분야에 도입되고 있다[17,18]. LSTM은 Schmidhuber 등[19]에 의해 제안된 RNN의 변형 형태로, 기존 RNN에서 발생하는 기울기 소실(vanishing gradient) 문제 등을 극복한 모델이다. Mohan 등[20]은 DNS 유동장으로부터 얻은 POD모드를 사용하여 난류의 비정상 동역학을 LSTM 네트워크를 통해 ROM을 성공적으로 모델링하였다. Zhan 등[21]은 천음속 버펫(transonic buffet)의 비정상 공력 특성을 예측하기 위한 ROM을 설계하였으며, 이때 LSTM이 MLP(MultiLayer Perceptron)보다 예측 성능이 더 우수함을 입증하였다.
본 연구에서는 합성 제트에 기반한 능동 유동 제어 문제를 다루며, 이러한 구동–유동 상호작용의 강한 비선형·비정상 특성을 정확히 예측하기 위해 LSTM 네트워크를 활용하였다. 익형 표면의 압력 센서 시계열로부터 POD 모드 계수를 실시간으로 추정하는 POD-LSTM 유동 추정기를 설계하였다. 유동 추정기는 비정상 유동의 시계열 특성을 실시간으로 예측함으로써, 고차원 유동장의 복잡한 동역학을 대표하는 ROM의 역할을 수행한다. 최종적으로, 설계된 유동 추정기를 PID 제어기와 결합하여 폐루프 제어 시스템을 구성하였으며, 이를 통해 고받음각 익형의 공력 성능을 개선하는 제어 시스템 방법론을 제안한다.
2.수치기법
2.1 해석조건 및 격자
본 연구는 데이터 기반의 유동 제어 방법론 구축 및 대리모델의 성능 검증에 주된 목적이 있다. 따라서 실시간 제어 프레임워크의 유효성을 효율적으로 시연하기 위해, 유사 연구[13]와 동일하게 레이놀즈수 Re=10,000, 마하수 M=0.1 조건에서 2차원 NACA0015 익형에 대해 층류 해석을 수행하였다. 비록 해당 레이놀즈수의 고받음각 유동은 본질적으로 천이 및 3차원적 난류 특성을 내포하고 있으나, 본 연구에서는 비정상 유동 제어를 위한 알고리즘의 거동을 확인하기 위한 벤치마크 모델로서 해당 계산 조건을 채택하였다.
본 연구는 실속과 같이 공력 성능이 저하되는 현상을 억제하는 유동 제어 기법을 개발하기 위한 목적으로 선행 연구[13]에서 실속이 발생하는 것으로 보고된 받음각 12° 부근의 세 가지 받음각 9°, 11°, 13°에 대해 합성 제트의 위치와 분출 특성별 해석을 진행하였다. 유동 해석에 사용한 KFLOW[22]는 2차원 및 3차원 Navier-Stokes 방정식 해석자 in house CFD 코드이며, 지배방정식의 공간이산화 기법으로는 격자 중심 유한체적법이 사용된다. 비점성 유속에 대하여 2차 정확도의 Van Leer 제한자와 MUSCL 기법을 적용한 Roe's FDS를 사용하였고[23], 점성 유속에 대해서는 2차 정확도의 중앙차분법으로 계산하였다. 비정상 유동 해석에서 시간 전진을 위해 2차 정확도의 이중시간 전진법(dual time stepping)이 사용되었고 가상 시간에서 정상해를 수렴시키기 위해 내재적 기법 DADI(Diagonalized ADI)를 사용하였다[24]. 비정상 유동 해석은 무차원 시간 간격 t*=0.005를 주었으며 총 계산 시간은 70 무차원 시간이다. 이후 제시되는 그림 및 학습 데이터는, 과도 구간이 종료된 t*=30 이후의 데이터를 기반으로 하며, 일부 시계열 그림은 명확성을 위해 20구간(t*=30~50)을 대표로 도시한다.
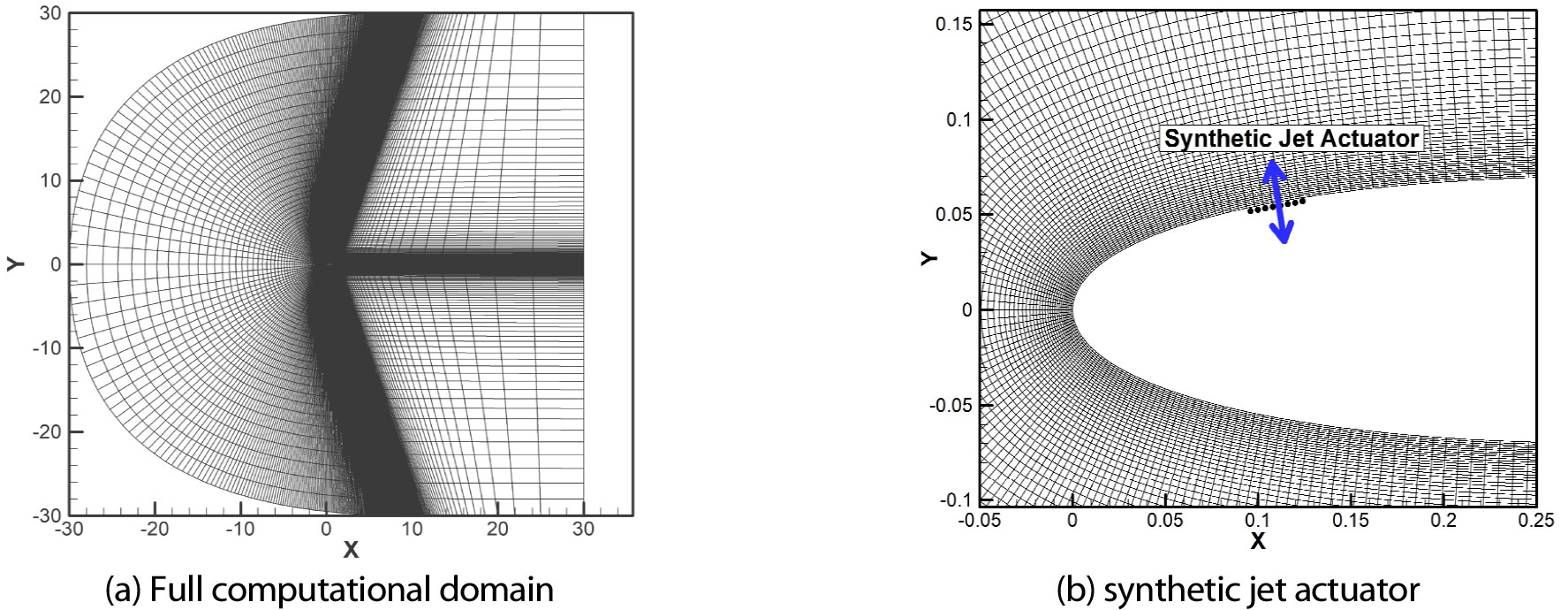
격자 수렴도 검증을 위해 501×121, 501×191, 601×121 크기의 격자에 대해 계산을 수행하였고, 501×121격자 기준 공력계수 값의 오차는 3% 이내였다. 따라서 계산 효율성을 위해 501×121크기의 격자를 사용하였으며, 격자수는 60,000개에 해당한다. 전체 격자 도메인에 대한 그림은 Fig. 1(a) 에 도시하였다. 공력계수에 대한 검증 결과는 3.1.1절에서 기술된다.
Jet의 위치는 9°, 11°, 13°에서 박리가 시작하는 지점의 평균인 x/c=0.1을 시작점으로, 시위 길이(c)의 2.5% 길이의 slot 으로 설정하였으며, Fig. 1(b)와 같다. Jet slot에서의 경계조건 속도는 식 (1)으로 설정하였고 가속도는 식 (2)으로 계산된다. 이 때 A는 자유류 속도 대비 제트의 최대 속도 의 비율을 나타낸다. 내부 에너지로는 평균 밀도에 피스톤 가속도를 곱해 압력구배를 계산하고 이를 에너지에 반영하는 방식으로 경계조건을 구성한다. (Stlrouhal number) 는 무차원 주파수로, 식 (3)와 같이 정의된다.
광범위한 합성제트 구동 조건에 대한 시스템의 동특성을 파악하기 위해, 를 0.6~3.0까지 0.2 간격으로 변화시키며 비정상 해석을 수행하였다. 이 주파수 범위는 유동이 제트 주파수에 의해 동조(lock-in)되는 구간 및 제트가 동조되지 못하는 고주파 범위까지 모두 포함한다[7,38].
합성 제트의 구동 강도는 식 (4)으로 정의되는 운동량 계수(momentum coefficient) 로 표현된다. 이는 제트가 분사되는 반주기(τ) 동안의 시간 평균 운동량(I)을 자유류의 동압(dynamic pressure)으로 무차원화한 것으로, Amitay 등[5]과 Goodfellow 등[25]의 연구에서 제시된 정의를 따른다.
본 연구에서는 받음각 9°와 11° 조건에서 제트의 최대 속도 진폭을 A=0.2로 설정하였으며, 이때 운동량 계수는 = 0.001 에 해당한다. 반면, 자연 유동의 박리 강도가 더 큰 받음각 13° 조건에서는 최대 진폭 A를 0.3으로 설정하였으며, 운동량 계수는 =0.0025이다. 이 운동량 계수는 선행 연구들[5,26]에서 제어 유효성이 입증된 (10-3) 범위 내에 존재하며, 공력 성능을 개선하기에 충분한 구동 강도라고 판단하였다.
2.2 POD 기법
POD(Proper Orthogonal Decomposition) 기법은 고차원의 복잡한 시스템에서 지배적인 구조를 추출하기 위한 수학적 기법이다. 이 기법은 Lumely 등[27]에 의해 유체역학 분야에 도입되었으며 Sirovich 가 제안한 스냅샷 방법[28]에 기반한다. 데이터의 분산이 최대가 되는 직교 기저(orthogonal basis)의 집합을 찾아내어, 원본 데이터를 저차원 공간으로 투영하여 최소한의 모드(mode)로 핵심적인 동적 특성을 재구성할 수 있다.
첫 번째 단계는 전산 유체 해석을 통해 얻은 특정 시간 간격에 따른 유동장 데이터 집합, 즉 스냅샷(snapshot)들을 열벡터로 하는 행렬 를 생성한다.
여기서 각 열벡터 는 시간 에서 유동장 데이터(속도, 밀도, 압력 등)을 나타내며, 본 연구에서는 압력장에 대한 차원 축소를 진행하였다. 는 공간 차원(격자수)를 의미하며, 은 전체 스냅샷의 개수이다. 는 시간평균된 유동장을 의미한다.
POD 모드는 공분산행렬(covariance matrix) 에 대한 고유치 문제를 풀어 얻을 수 있다. 인 경우, 계산의 효율성을 위해 크기의 스냅샷 공분산 행렬 의 고유치 문제를 푼다.
이때 는 과 공유하는 고유치(eigenvalue)이며, 는 고유벡터(eigenvector)이다. 고유치 는 유동 에너지(분산)의 기여도를 정량적으로 나타낸다. 식 (12)의 는 의 고유벡터인 를 이용하여 계산되는 공간 POD 기저(basis), 즉 POD 모드(mode)를 나타낸다. 특정 모드가 차지하는 에너지 비율은 식 (13)으로 계산된다.
추출된 POD 모드들을 선형 조합하여 원본 유동장을 근사적으로 재구성할 수 있다. 에너지가 큰 상위 P개의 모드 () 만을 사용하여 데이터를 표현하며, 재구성된 데이터는 아래 식 (14)과 같이 표현된다.
여기서 는 k번째 공간 모드이며, 는 k번째 시간계수이다. 시간계수 는 POD 모드의 정규직교성에 의해 아래 식 (15)과 같이 재구성 식 (14)의 양변에 특정 모드를 내적하여 계산된다. 시간계수는 모드에 해당하는 공간구조가 시간에 따라 어떻게 변하는지에 대한 정보를 포함한다.
2.3 LSTM 기반 유동 추정기 설계
비정상 유동에서의 폐루프 제어를 구현하기 위해서는 제어입력에 대한 시스템 응답을 신뢰성 있게 예측할 수 있는 동특성 모델, 즉 유동 추정기(Flow Estimator)가 필요하다. 본 연구에서는 이를 위해 시스템의 과거 출력값과 외부 제어 입력을 동시에 고려하는 비선형 자기회귀 외생 입력(NARX, Nonlinear AutoRegressive with eXogenous Inputs) 구조의 유동 추정기 모델을 설계하였다[29]. 이 모델의 네트워크로는 장단기 기억 신경망(Long Short-Term Memory, LSTM)을 사용하였다. LSTM은 기존 순환 신경망(RNN)의 기울기 소실(vanishing gradient) 문제를 극복한 모델로[19], 복잡한 시계열 동역학을 효과적으로 모델링하는 데 강점이 있다. 모델의 입력 벡터는 시스템의 상태를 표현하는 POD 모드 시간계수 , 압력 센서 신호 및 외생 입력(exogenous input) 인 제어 신호 로 구성된다.
모델의 출력 벡터(output vector) 는 제어 입력을 제외한 시스템 응답 성분으로 구성되며, 와 로 구성하였다.
모델은 현재 시점 k의 출력을 예측하기 위해 과거 L 스텝의 데이터를 입력으로 사용한다. 시계열 입력 은 식 (18)과 같이 과거 L개의 상태 벡터들의 집합으로 정의된다.
이처럼 구성된 입력 시퀀스 를 통해 모델은 시간에 따른 변수들의 비선형적 의존성을 학습하며, 이를 바탕으로 다음 시점의 예측 출력 를 계산한다.
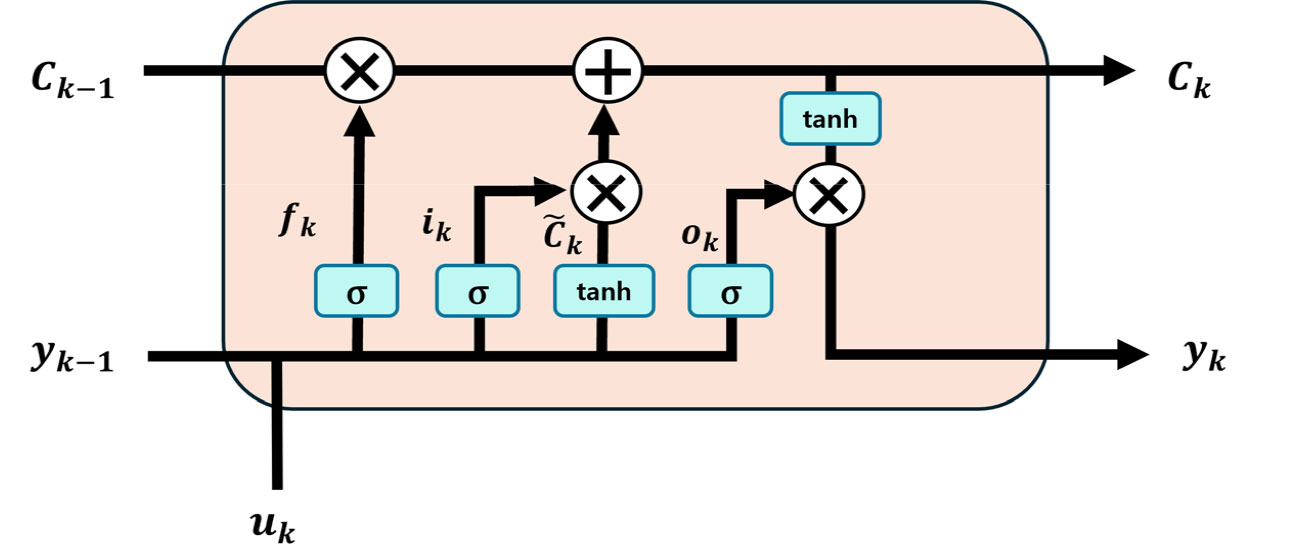
LSTM 내부에서는 입력 게이트, 망각 게이트, 출력게이트로 구성된 게이트 연산(𝜎, gating mechanism) 이 존재한다. 이 게이트들은 현재 시점의 외생 입력 와 이전 시점의 출력 을 기반으로 작동한다. 입력 게이트 와 망각 게이트 는 현재 시점의 입력과 이전 시점의 은닉 상태를 기반으로, 어떤 정보를 셀 상태(cell state)에 유지하고 얼마나 폐기할지를 결정하며, 더 이상 유효하지 않은 과거 정보를 효율적으로 제거한다. 는 가중치 행렬(weight matrices), 는 편향 벡터(bias vectors)를 나타낸다.
는 현재 시점의 입력과 이전 상태 정보를 바탕으로 생성된 새로운 상태 후보 벡터이다. tanh 활성 함수를 통해, 새로운 상태 벡터 가 계산된 후, 출력게이트 에서 활성 함수를 통해 필터링되어 최종 출력을 결정한다. LSTM의 게이트 연산 구조는 Fig. 2에 도시하였다.
본 연구의 모델은 Python을 기반으로 TensorFlow 및 Keras 프레임워크를 사용하여 구현하였다. 학습 과정은 Adam 최적화 알고리즘[30]과 평균제곱오차(MSE) 손실함수를 기반으로 수행하였으며, 배치 크기 64와 최대 200 epochs를 설정하였다. 이 모델은 다음 절에서 기술되는 센서 위치 최적화 과정의 기준 모델로 활용되며, 이후 센서 입력 신호를 이용하여 작동하는 최종 유동 추정기의 기반이 된다.
2.4 최적 센서 선정 기법
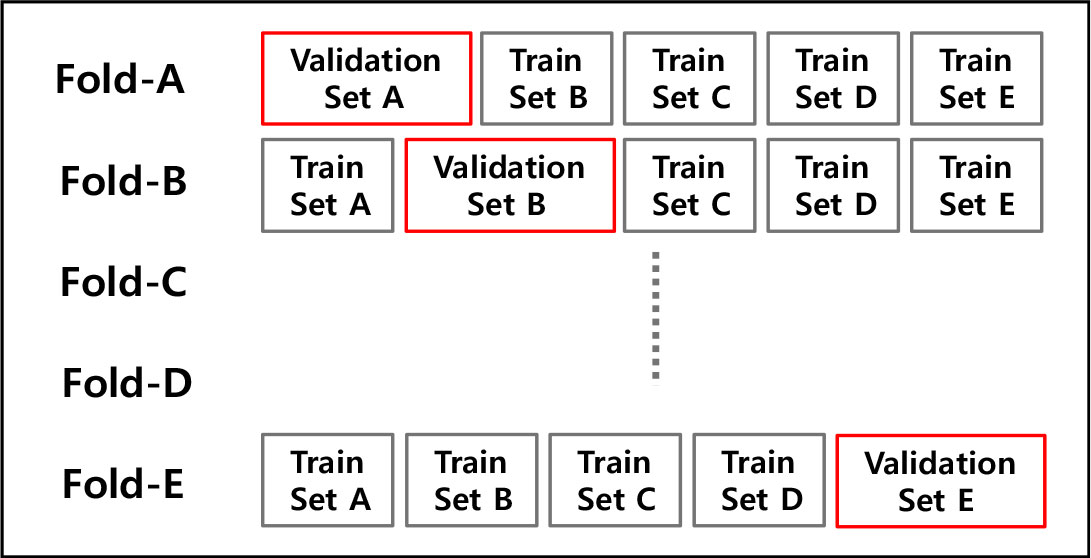
유동 예측 모델은 2.3절의 장단기 기억 신경망(LSTM)을 사용하였으며, 과거 시계열을 입력으로 받아 다음 시간 스텝의 모드와 압력센서 정보를 예측한다. 모델의 일반화 성능은 5-fold 교차 검증(5-fold cross-validation)으로 평가하였다. 교차 검증의 절차와 타당성은 Arlot 과 Celisse[31]의 과정을 따른다. 개략도는 Fig. 3과 같고, 전체 데이터 케이스를 5개의 그룹(group)으로 무작위 분할하여 각 그룹이 전체 데이터의 약 20%를 차지하도록 구성하였다. 총 5번의 독립적인 학습과 평가를 수행하였으며, 각 단계에서는 하나의 그룹을 테스트용으로 미리 분리하여 학습 과정에서 완전히 제외하고, 나머지 4개의 그룹만을 사용하여 모델을 학습시켰다.
학습된 모델은 분리해 두었던 테스트 그룹으로 성능을 평가했으며, 예측된 모드의 정규화 평균제곱오차(NMSE)를 주 성능 지표로 사용하였으며 정의는 식 (27)과 같다.
이때 는 POD를 통해 계산된 실제 시간계수, 는 모델이 예측한 시간계수, 는 실제 시간 계수의 평균이다. NMSE는 예측값과 실제값 사이의 평균 제곱 오차(MSE)를 실제 값의 분산으로 나눈 값이며, 값이 0에 가까울수록 예측 성능이 우수함을 의미한다[32].
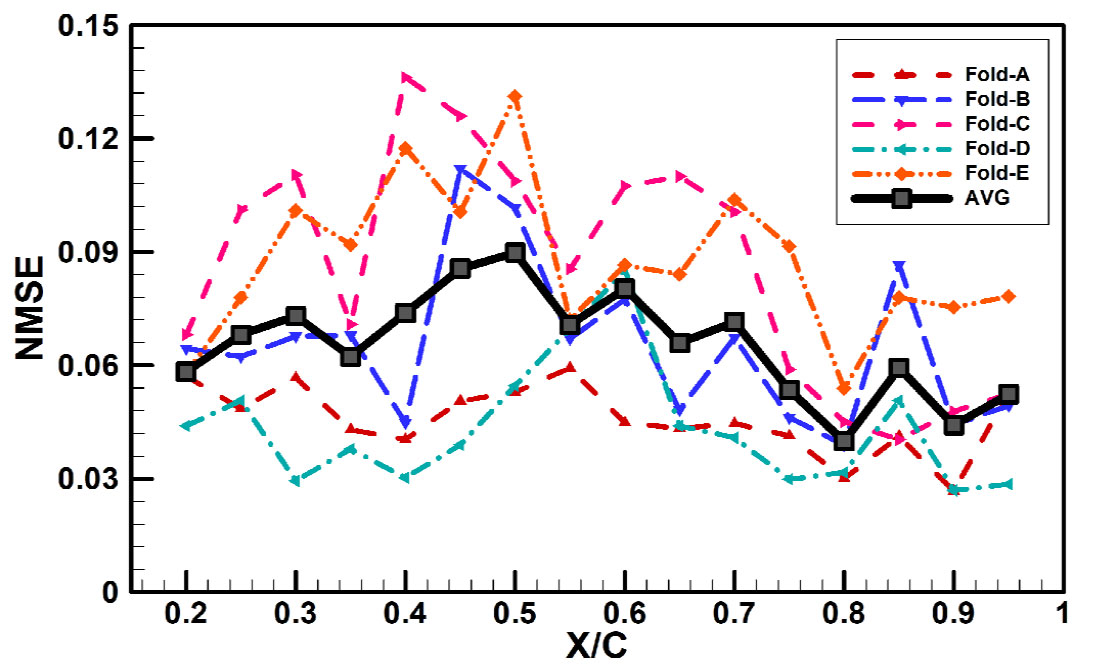
센서 선정은 2단계로 수행된다. 첫 번째 단계에서는 0.20에서 0.95까지 0.05 간격의 모든 단일 센서 후보에 대해 전수 조사를 수행하여 성능이 우수한 상위 후보군을 식별하였다. Fig. 4는 첫 번째 단계에서 수행한 5-fold 교차 검증의 결과를 보여준다. 단일 센서의 각 위치(x/c)에 따른 NMSE를 도시한 것으로, 5개 fold의 평균값(average, AVG)이 모델의 일반화 성능을 나타낸다. 이때 x/c=0.80 위치에서 평균 NMSE가 가장 낮았다. 또한 이 지점에서 5개 fold의 개별 결괏값이 비교적 밀집되어 있어, 데이터 분할에 따른 변동성이 낮고 강건한 성능을 제공하는 위치임을 확인하였다.
두 번째 단계에서는 이 상위 후보군들로 구성된 2개의 센서 조합에 대해 동일한 평가를 진행하여, 센서 추가에 따른 성능 변화를 분석하였다. 2개 센서 조합의 경우, 단일 센서 구성에 비해 모드 예측 성능이 비슷하거나 일부 저하되는 결과가 나타났다. 이는 모델이 예측해야 할 출력 변수가 증가함에 따라 학습의 복잡도가 상승한 결과로 분석된다. 따라서 본 연구에서는 x=0.80 위치의 단일 센서를 사용하는 것이 모드 예측에 있어 가장 효율적인 구성으로 판단하였다.
2.5 폐루프 제어
본 연구에서 구현된 제어 시스템은 단일 입력, 단일 출력(SISO, Single-Input, Single-Output) 구조를 따른다. 제어기(Controller)는 단일 제어 입력(합성 제트 구동 신호, )을 통해 단일 출력 변수(모드 계수, )를 목표값 으로 수렴시키는 것을 목표로 한다. 이때 제어 대상인 플랜트(Plant)는 익형 주위의 실제 물리적 유동 현상을 의미하며, 앞서 설계한 압력센서 기반 POD-LSTM 유동 추정기를 대리 모델(surrogate model)로 활용한다. 이 대리 모델은 제어 루프 내에서 플랜트의 역할을 수행하며, 제어 입력 에 대한 시스템의 동적 반응(모드 계수 및 표면 압력)을 실시간으로 예측하는 가상 환경을 제공한다.
제어기는 강건성이 뛰어난 비례-적분-미분(PID) 제어기를 채택하였다. 제어기는 목표 모드 계수()와 플랜트로부터 예측된 현재 모드 계수()와의 오차 를 입력으로 받아, 이를 최소화하는 제어 신호, 즉 합성 제트 구동 신호 를 계산한다. 본 연구에서 목표 모드 계수는 유동이 제트의 주파수에 동조(lock-in)되는 영역에 해당하는 모드 계수이다.
여기서 , , 는 각각 비례, 적분, 미분 이득(gain)을 나타내는 제어 파라미터이다. 튜닝은 Ziegler-Nichols 공식[33]을 통해 초깃값을 설정하고, 이후 과도 응답(transient response) 특성을 고려하여 미세 조정하였다. 본 연구에 사용된 최종 이득 값은 3.3절에 제시된다. 폐루프 제어 알고리즘은 각 시간 스텝 k에서 다음과 같이 진행된다.
(a) 유동 추정기의 가장 최근 출력인 를 관측한다.
(b) 오차 e(k)를 계산하고, PID 제어기를 통해 제어 입력 u(k)를 산출한다.
(c) 과거 L 스텝의 상태 이력과 새로운 제어 입력u(k) 를 유동 추정기에 입력하여, 다음 스텝 와 를 예측한다.
(d) 상태 이력을 한 스텝 전진시킨 후, (a) 단계로 복귀하여 과정을 반복한다.
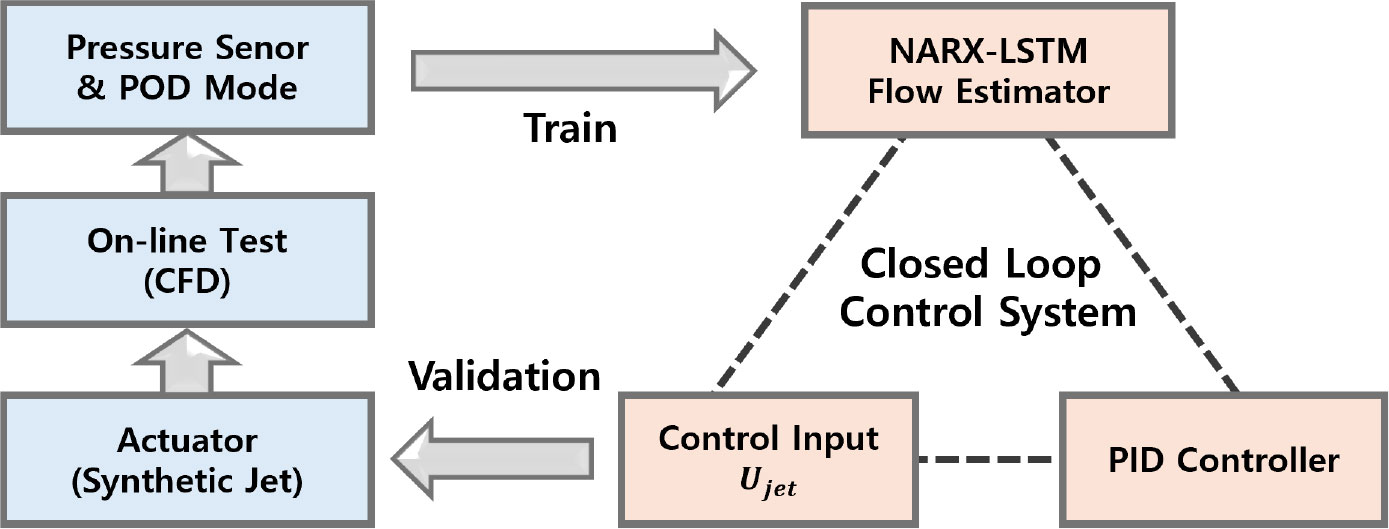
Fig. 5에는 2.2절부터 2.5절의 방법론에 대한 최종 제어 프레임워크를 도시하였다. 파란색 블록은 CFD 솔버인KFLOW를 통해 처리되는 과정이며, 붉은색 블록은 학습된 대리모델을 기반으로 실시간 피드백이 이루어지는 폐루프 제어 구조이다.
3. 결과 분석
3.1 유동 제어 전 결과
3.1.1 제어 전 CFD 결과 해석
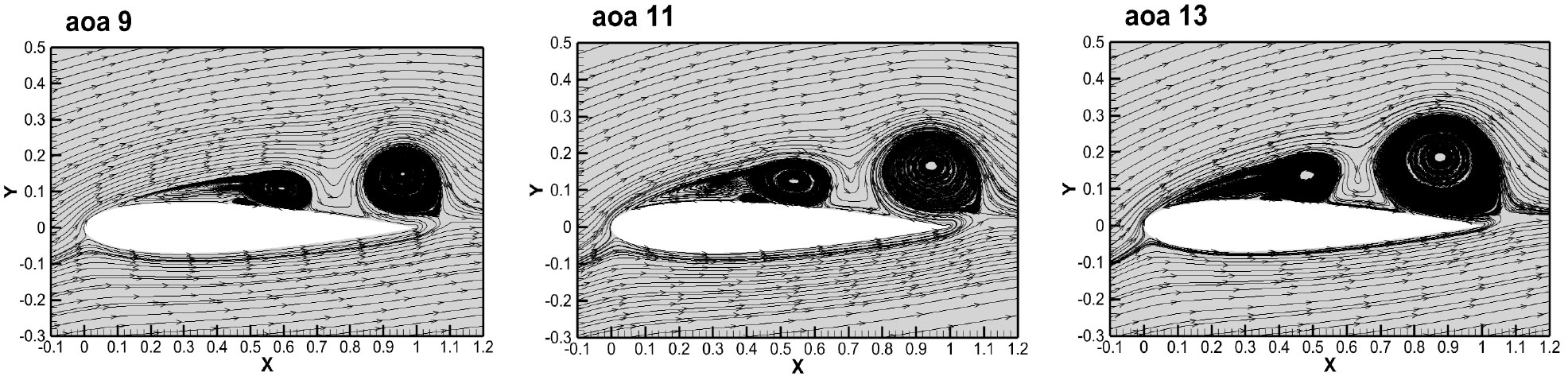
제어기를 설계하기 전, 제어 전 유동장에 대한 분석이 수행되었다. 유동 조건은 마하수 M=0.1, 레이놀즈수 Re=10,000을 사용하였으며, 층류모델로 해석을 수행하였다. Fig. 6은 CFD 해석으로 얻은 받음각(angle-of-attack, aoa) 9°, 11°, 13° 조건에서의 유선(streamline) 분포를 나타내며, 저레이놀즈수 영역에서 관찰되는 전형적인 층류 박리 특성을 보인다. 이 영역의 층류 경계층은 운동에너지가 낮고, 역압력 구배에 민감하여 쉽게 박리된다[34]. 박리된 전단층(shear layer)은 자유류로부터 운동량을 공급받아 표면에 재부착하며, 층류 박리 거품(laminar separation bubble, LSB)이 형성되어 압력 항력을 증가시키는 주요 원인이 된다.
제어 전 상태에서 양력계수() 와 항력계수()는 Fig. 7에 도시하였다. 수치해석 모델의 타당성을 검증하기 위해 계산 조건이 동일한 선행연구[13]에 제시된 양력계수에 대해 비교 검증을 수행하였다. 평균 양력계수는 약 3.8%의 오차를 보였으며, 주기적으로 진동하는 양상이 유사함을 확인하였다. 구체적인 수치 비교는 Table 1과 같다.
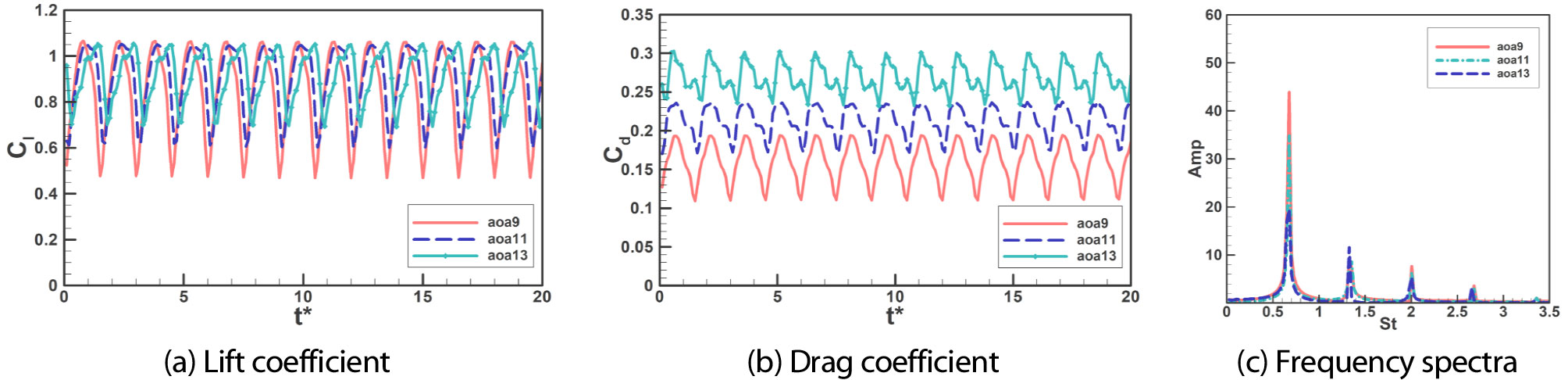
Table 1.
Comparison of lift coefficient with previous research at aoa = 11°
| avg | max | min | St | |
| Seidel et al.[13] | 0.866 | 1.106 | 0.618 | 0.645 |
| Present study | 0.899 | 1.044 | 0.625 | 0.685 |
양력계수와 항력계수의 주기적인 변동은 전단층 박리(shear layer separation)와 와류 방출(vortex shedding)의 반복적인 발생을 의미한다. 과 에 대한 FFT(Fast Fourier Transform) 분석 결과, 받음각 9°, 11°, 13°의 모든 조건에서 St=0.685의 동일한 지배 주파수가 나타났다, 이는 전단층 불안정성에 의해 결정되는 자연 와류 방출 주파수(natural vortex shedding frequency, )에 해당한다. 추가로 유동의 비선형적 특성을 나타내는 고조파(harmonic)성분이 존재하며, 지배 주파수의 정수배(2×, 3×)에 해당하는 St=1.370, St=2.055의 값을 지닌다. 이러한 주파수 특성은 선행연구들[7,35,36,37]과 동일하며, 합성 제트의 구동 주파수 결정에 중요한 기준으로 적용된다. Wu 등[37]은 합성 제트의 구동 주파수가 자연 방출 주파수 와 정수배 관계일 때, 와류 방출과의 조화 공진(harmonic resonance) 및 완전한 주파수 동조(lock-in)가 유도되어, 대규모 박리가 작은 와류 구조로 조직화되어 양항비가 향상됨을 보고하였다.
3.1.2 제어 전 POD 결과 해석
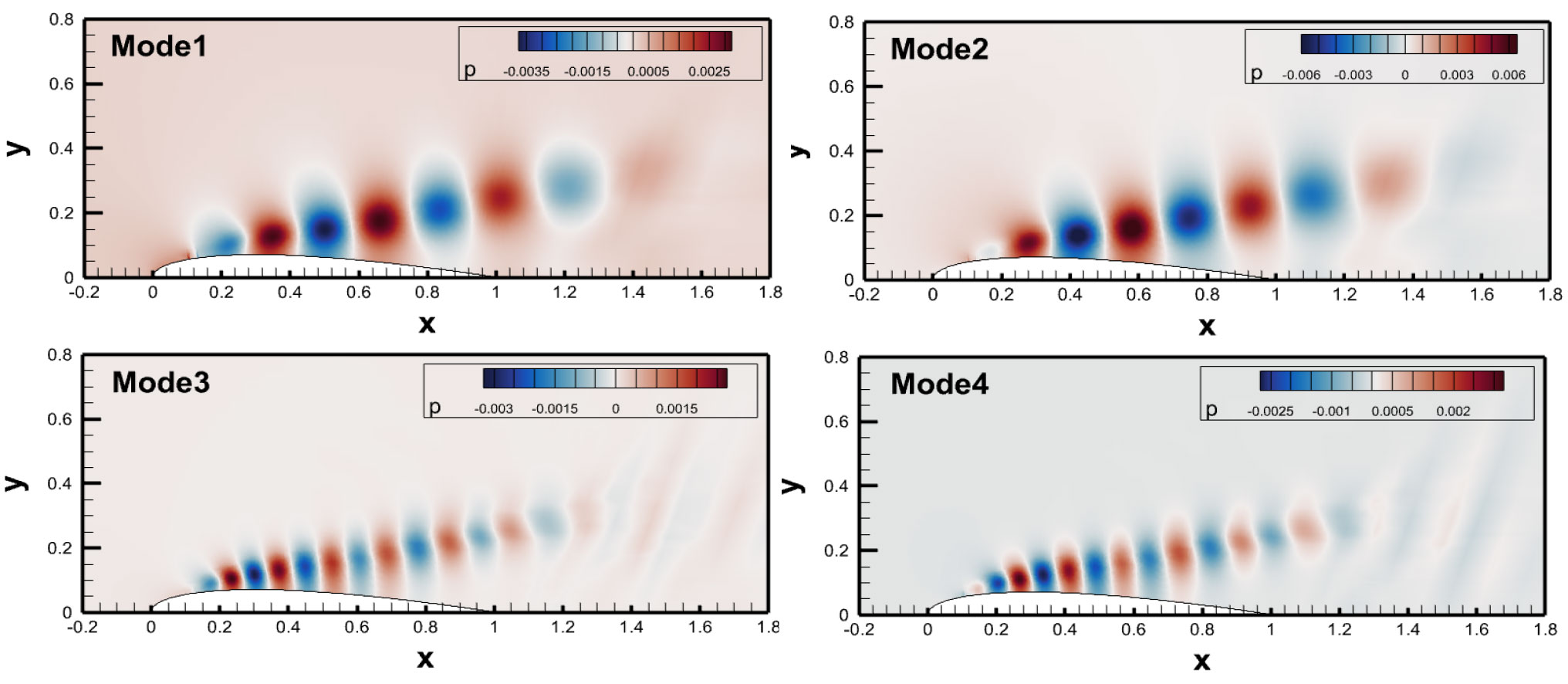
Fig. 8은 받음각 13°에서 압력장의 POD 모드 분해를 통해 얻은, 에너지가 가장 높은 상위 4개 모드(Mode1-Mode4) 에 대한 공간구조를 나타낸다. Fig. 9은 각 모드의 시간계수와 그에 따른 FFT 스펙트럼을 보여준다. Mode1과 Mode2 는 동일한 주파수(St=0.685)로 진동하고 공간 분포가 유사하여 페어링(pairing)모드로 해석된다. 이 주파수는 자연 와류 방출 주파수() 및 앙력·항력계수의 지배 주파수와 일치한다. Mode3과 Mode4 는 Mode1·2 의 2배에 해당하는 주파수(St=1.370)로 진동하며, 의 고조파(harmonic)로서 비선형 상호작용에 의해 형성된 후류 구조를 반영한다. 이러한 POD 모드의 전반적인 공간 구조는 받음각 9°, 11°에서도 유사하게 관찰되었다. 에너지가 가장 큰 Mode 1의 시간 계수가 유동장의 주요 동적 특성을 대표하므로, 이를 제어 대상으로 선정하는 것이 타당하다고 판단하였다.
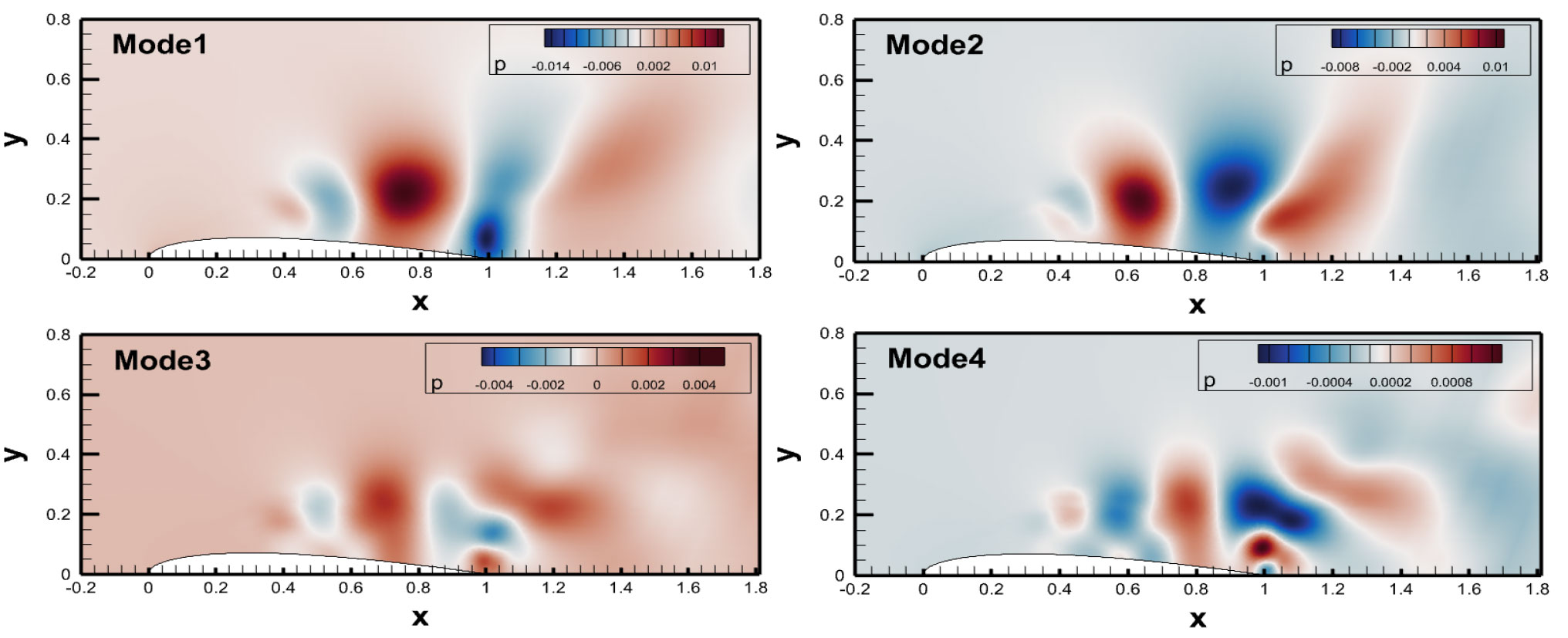
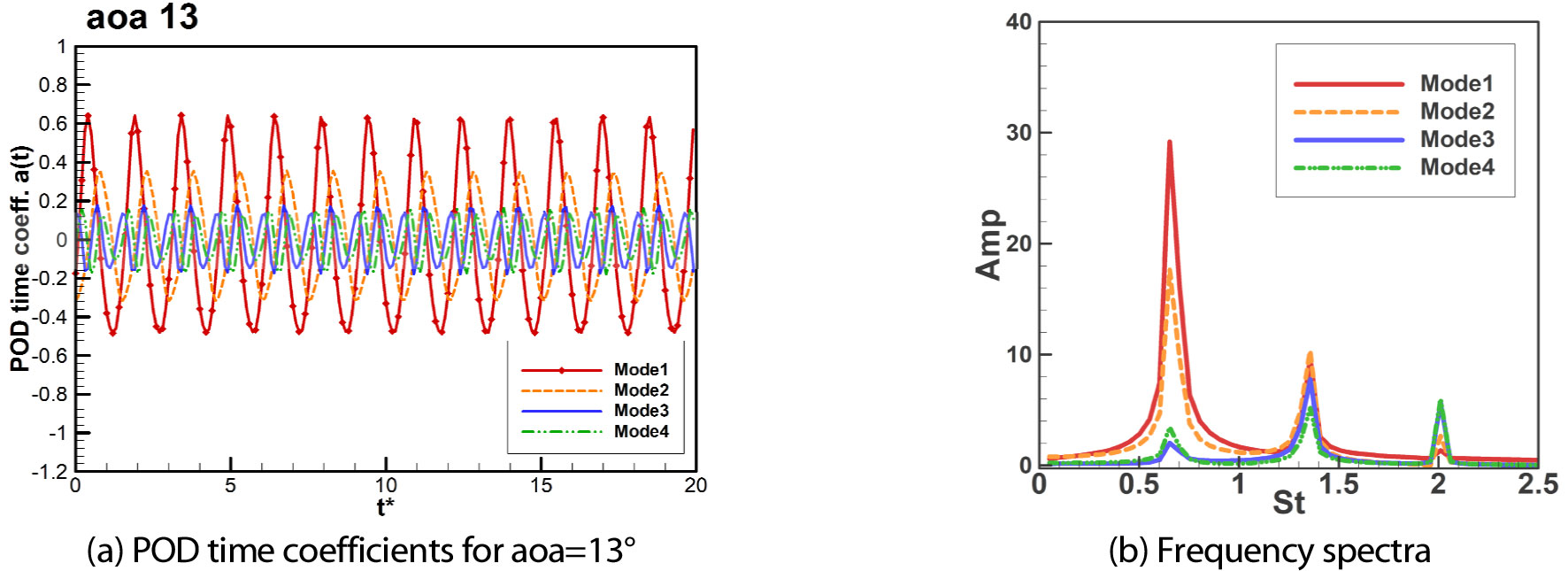
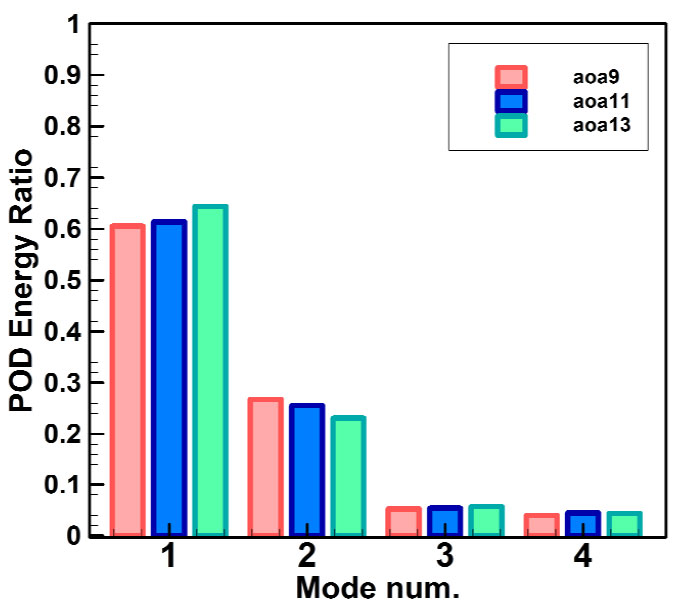
Fig. 10은 받음각 9°, 11°, 13°에서 각 모드의 POD 에너지 비율을 도시한다. Mode 1의 에너지는 박리 크기에 비례하는 경향을 보이며, Mode 1부터 Mode 4까지의 누적 에너지 비율은 0.95 이상으로 나타났다. 이는 상위 4개 모드의 선형 조합만으로도 원본 유동장을 95% 이상 재구성할 수 있음을 의미한다.
3.2 유동 추정기 성능 검증
2.3절에서 설계되고 2.4절에서 선정된 최적 센서 위치(x/c=0.80)를 이용하는 NARX-LSTM 기반 유동 추정기의 성능을 검증하였다. 본 추정기는 이후 설계될 폐루프 제어 시스템의 플랜트 모델(plant model)로 활용되며, 다양한 유동 조건에서 제어 입력에 따른 시스템의 응답을 신뢰성 있게 예측하는 것이 필수적이다.
이를 위해, 3개의 받음각 9°, 11°, 13° 및 Strouhal 수(St) 0.6~3.0(간격 0.2) 범위의 총 39개 유동 조건과, 제어 하지 않은 각 받음각에서 자연 유동의 상태를 학습시켰다. 여기서 자연 유동(baseline) 데이터는 모델이 외부 제어입력이 없는 상태의 유동 특성을 학습함으로써, 이후 모델이 능동 제어에 의한 유동 변화량을 정확히 인지하고 예측하기 위한 기준점 역할을 수행한다. 학습에 사용되지 않은 9개의 케이스(전체 데이터의 약 21%) 를 별도의 검증 데이터셋(validation dataset)으로 분리하여, 추정기의 예측 정확도를 평가하였다.
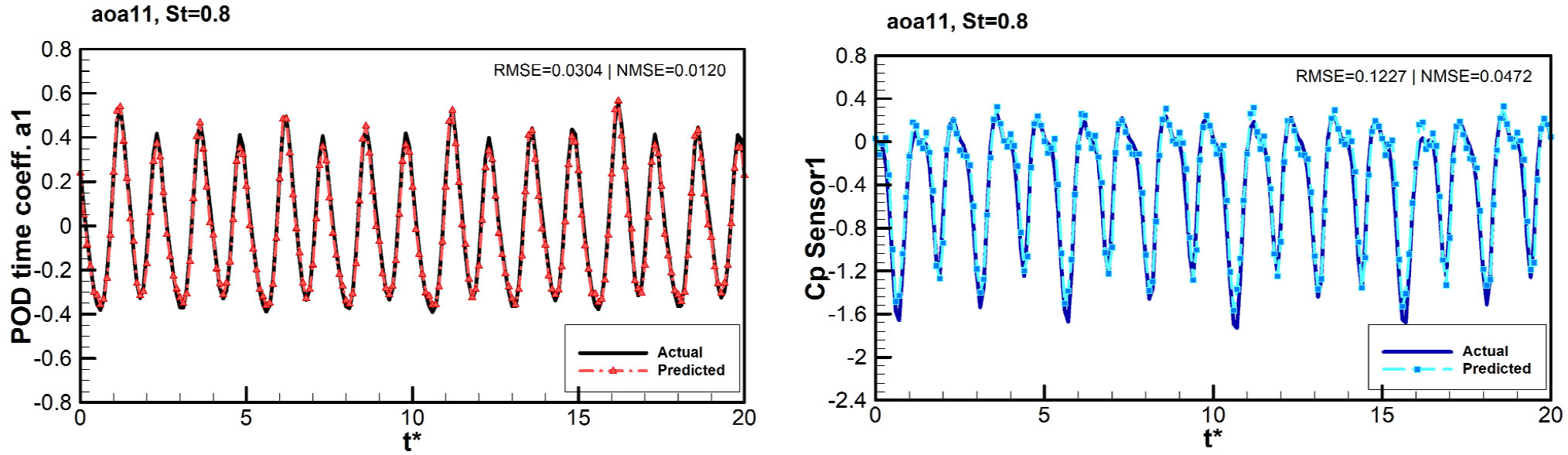
Fig. 11, 12, 13은 추정기가 예측한 POD 시간 계수()와 센서 위치(x/c=0.80)에서의 압력 계수(Cp)를 실제 CFD 값(Actual)과 비교하여 도시한 것이다. 모든 케이스에서 모델의 예측값(Predicted)이 실제 데이터(Actual)의 진폭과 위상을 성공적으로 재현하는 것을 확인할 수 있다. 특히 Fig. 12 의 경우, St=3.0의 상대적으로 높은 주파수로 제어가 입력되었음에도 유동장은 이에 동조(lock-in)되지 않고 저주파의 복잡한 동특성을 보인다. 개발된 모델은 이러한 고주파의 제어 입력에서도 실제 유동의 저주파 응답을 성공적으로 재현하였으며, 이는 모델이 제어 입력과 유동 응답 간의 비선형적 관계를 정확히 학습했음을 보여준다.
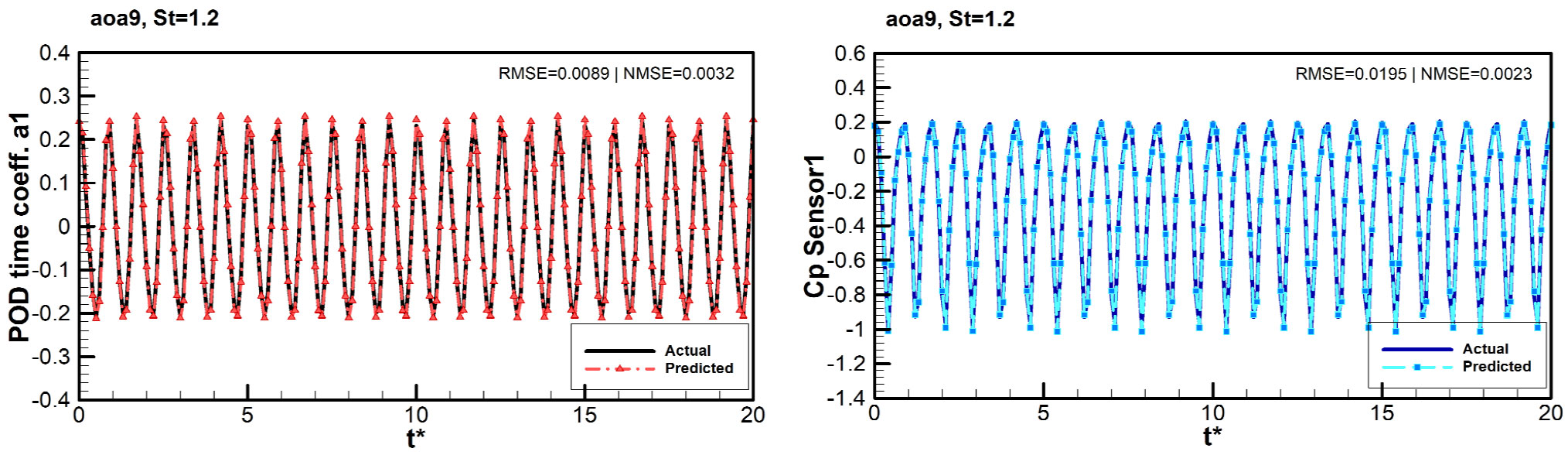
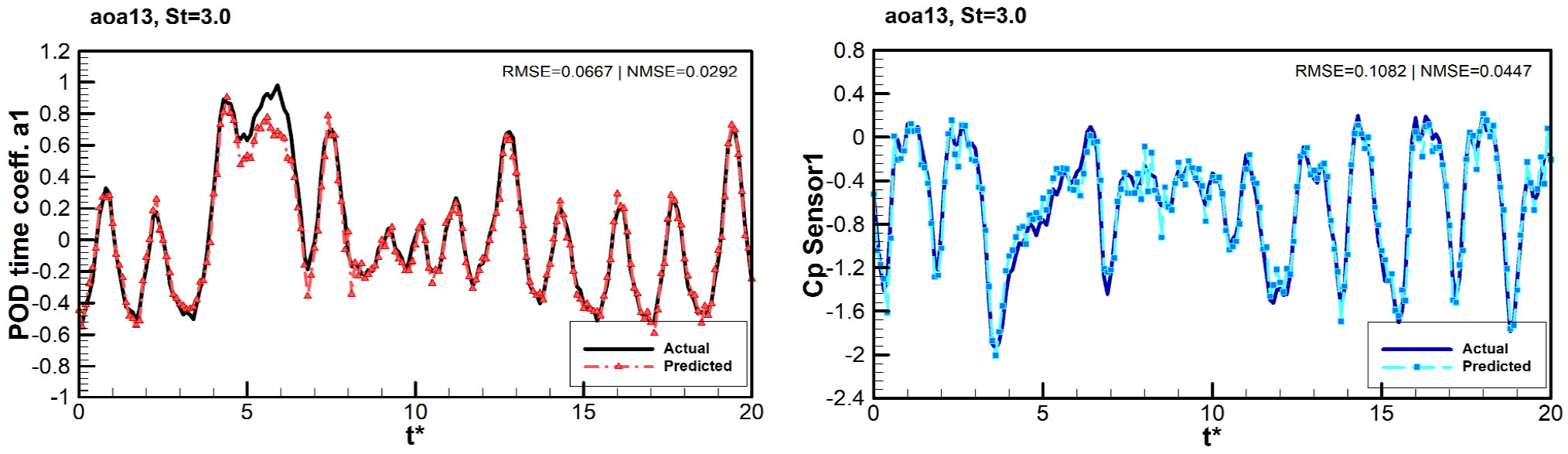
예측 성능을 정량적으로 평가하기 위해, 모든 검증 케이스에 대한 평균 제곱근 오차(RMSE)와 정규화 평균 제곱 오차(NMSE)를 계산하였다.
학습에 사용되지 않은 9개의 검증(validation) 케이스에 대해 모델의 일반화 성능을 평가한 결과, 첫 번째 모드의 시간 계수(a1) 예측에 대한 평균 NMSE는 0.0159, 압력 계수(Cp)에 대한 평균 NMSE는 0.0338로 계산되었다. 이를 통해 제안된 모델이 학습 데이터 이외의 조건에서도 우수한 예측 안정성과 일반화 성능을 확인하였다. 따라서 본 모델은 폐루프 제어기 설계를 위한 플랜트 모델(plant model)로 사용하기에 충분한 정확도와 신뢰성을 확보하였다고 판단하였다.
3.3 폐루프 유동제어 결과
3.3.1 제어 결과 분석
앞서 3.2절에서 검증된 유동 추정기(NARX-LSTM)와 2.5절의 PID 제어기를 결합하여 폐루프 제어 시스템을 구축하였다. 본 제어 시스템의 목표값(target signal)은 POD 시간계수 의 진동을 완전히 억제하는 것이 아닌, 특정 주파수의 응답으로 설정하였다. 이는 개루프(open-loop) 해석 결과, 유동이 구동 주파수에 동조(lock-in)되는 범위 내에서 세 받음각(9°, 11°, 13°)의 평균 양항비가 가장 높게 나타난 주파수 =1.4(≈2×)로 선택한 것이다. 본 절에서는 이 목표 주파수를 추종하도록 설계된 제어기 응답을 경계조건을 통해 CFD 해석 과정에 직접 적용하여, 실제 유동 제어 성능을 검증하였다.
각 받음각 조건에서 제어기의 안정적인 작동을 보장하기 위한 PID gain 탐색을 수행하였다. 받음각 증가에 따라 비례이득(Kp)도 점진적으로 증가하였으며, 적분(Ki)과 미분(Kd) 이득은 유사한 수준을 유지하였다. 이러한 비례이득(Kp)의 경향은 제어 대상인 POD 시간계수 의 초기 특성과 연관된다. 제어 전 상태에서 의 진폭은 받음각이 9°에서 13°로 증가할수록 크게 나타났으며, 이는 제어기가 극복해야 하는 초기 오차(initial error)가 받음각이 높을수록 커짐을 의미한다. 따라서, 초기 오차가 클수록 이를 효과적으로 감쇠시키기 위해 더 높은 비례 이득(Kp)이 요구되는 것으로 해석된다. Fig. 14은 각 받음각(9°, 11°, 13°)에 대해 효과적인 PID 이득 범위를 나타낸 것으로, 이 영역 내에서 시스템의 응답이 안정적으로 유지되고 과도한 진동이나 발산 현상이 발생하지 않음을 확인하였다. 이 결과를 바탕으로, 이후의 제어 해석에서는 받음각별로 해당 범위 내의 대푯값을 선정하여 폐루프 제어기에 적용하였다.
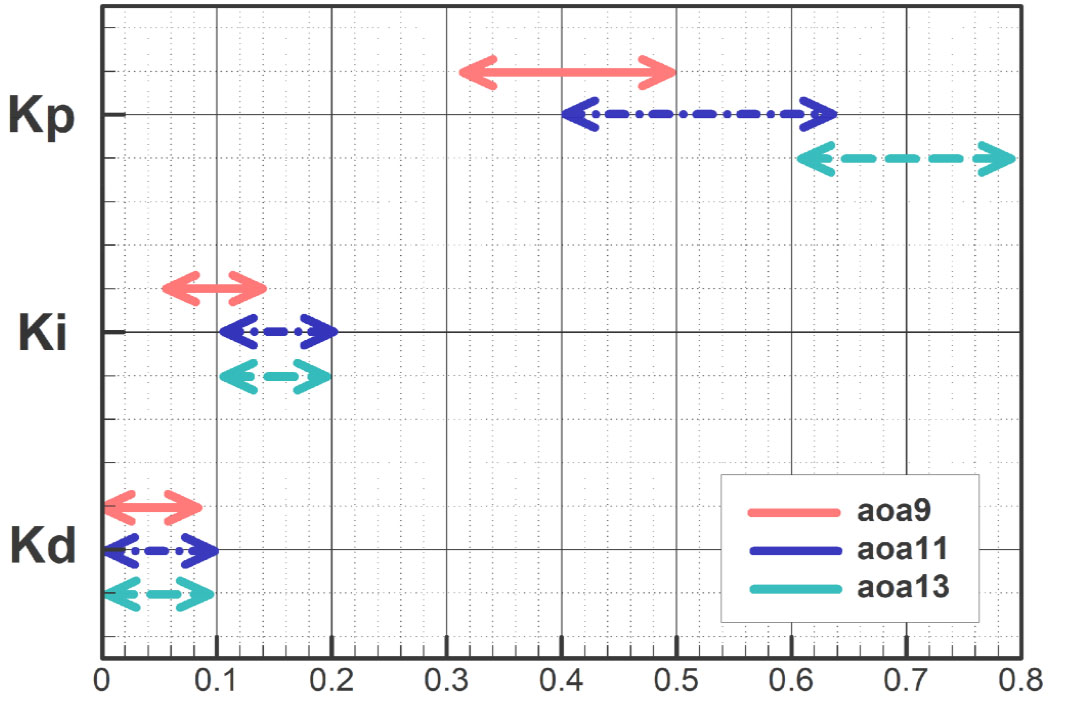
Fig. 15부터 Fig. 17은 각 받음각(9°, 11°, 13°) 조건에서의 폐루프 제어 결과를 나타낸다. 모든 케이스는 초기 구간 t*=0~10 동안 제어가 작동되지 않은 자연 유동(uncontrolled flow) 상태로 시작하며, t*=10 시점에서 폐루프 제어기가 작동된다. 각 그림의 왼쪽 (a)는 제어 시스템의 응답을 나타낸 것으로, t*= 10 이전에는 제어 입력이 0이며, POD 시간계수 와 센서 신호 (x/c=0.8)가 큰 진폭으로 진동하는 것을 확인할 수 있다. 제어기가 작동된 이후 무차원 시간 5의 과도 구간(transient phase)을 거치며 제어 입력이 즉각적으로 계산되어 시스템에 반영된다. 이 때 제어 입력 는 PID 제어기로 계산되어 산출되는 blowing/suction 신호임을 확인할 수 있다. 이러한 신호에 따라 은 목표 주파수 St=1.4의 안정적인 진동 상태로 빠르게 수렴한다.
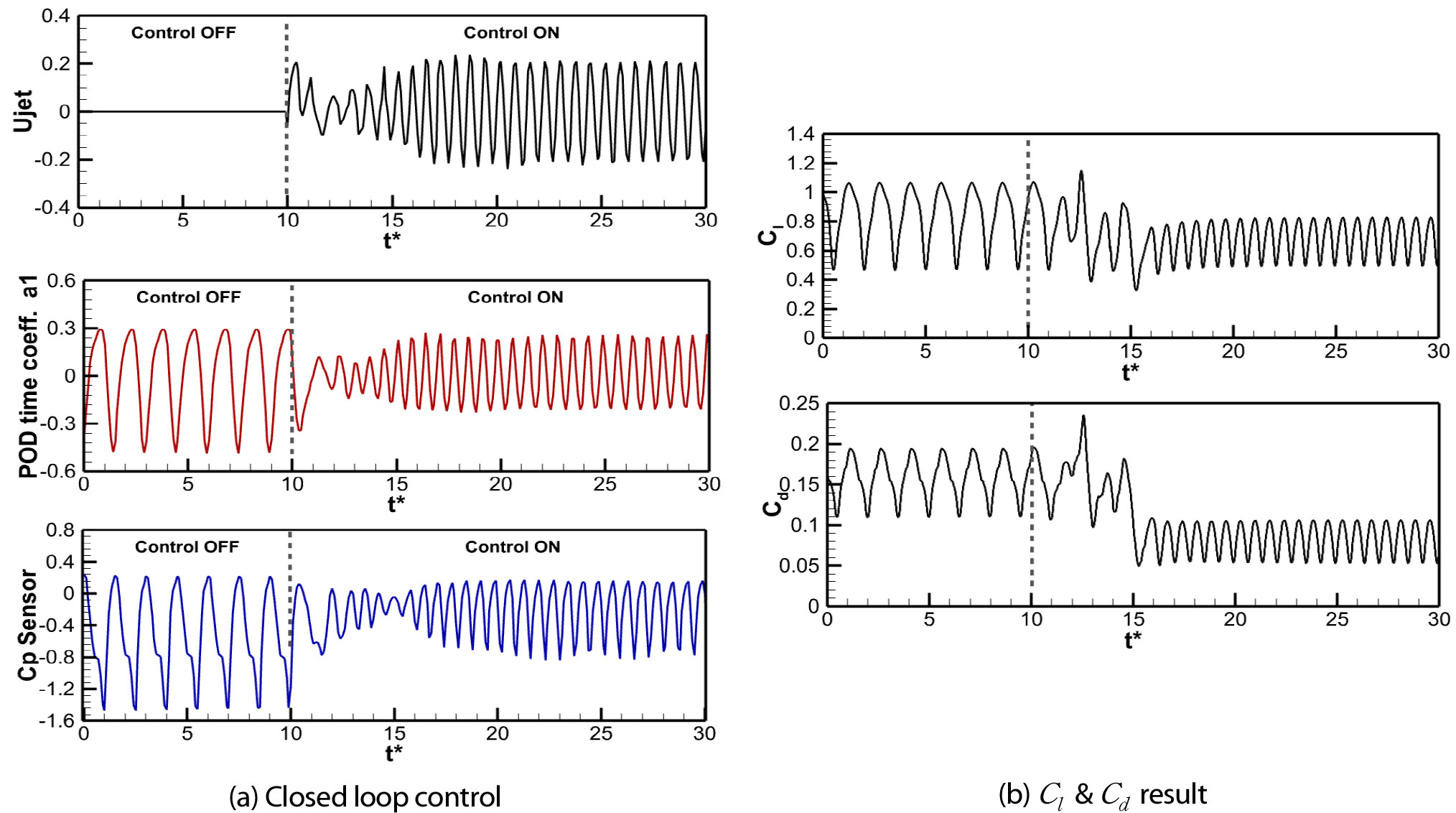
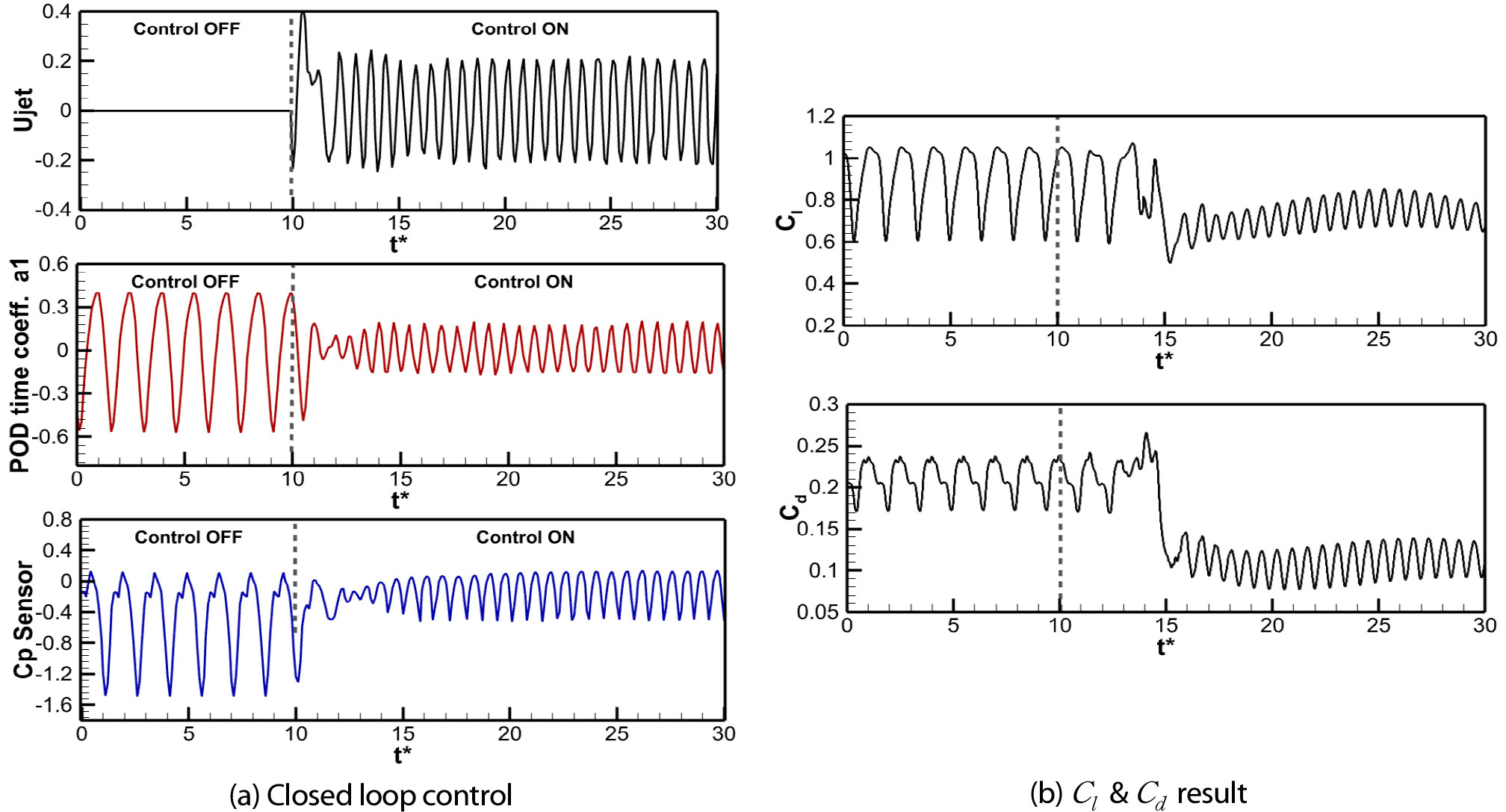
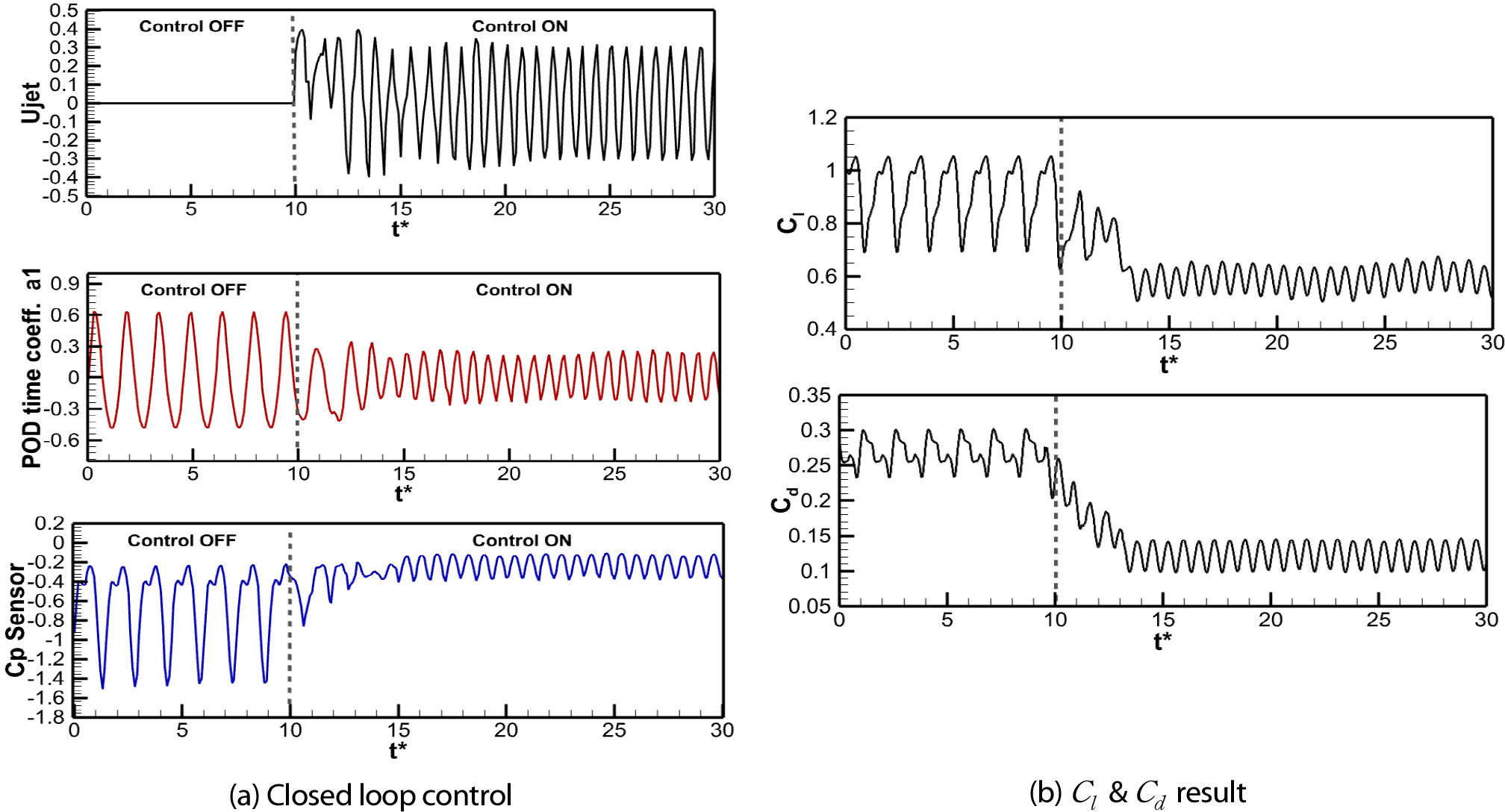
각 그림의 오른쪽 (b)는 제어 시스템이 적용된 CFD의 실제 공력계수(, ) 응답을 나타낸다. 모든 받음각 조건에서 제어기가 작동한 이후 양력 및 항력계수의 진폭이 현저히 감소하였다. 이는 구동 주파수에 유동이 동조되며 제어 전 존재하던 대규모 박리가 작은 규모의 규칙적인 와류 구조로 재배열되었음을 나타낸다. 이러한 유동 구조의 변화는 익형 표면 전반의 과도한 압력 변동 현상을 효과적으로 완화하며, 결과적으로 공력계수의 진폭이 감소하는 제어 효과를 확인하였다.
Fig. 18과 Table 2는 세 가지 받음각 조건에서 제어 전후의 시간 평균 공력계수를 비교한 결과를 나타낸다. 제어 후, 모든 조건에서 평균 항력계수는 현저히 감소하였으며, 평균 양력계수는 소폭 감소하였다. 이러한 양력 감소는 제어에 의해 대규모 박리와 와류 진동이 억제되면서, 익형 상부의 저압 영역이 완화된 결과로 해석된다. 결과적으로 평균 양력계수는 감소하였지만, 항력 저감의 영향이 더 컸으며, 전체적으로 양항비가 향상되었다. 그 결과, 세 받음각 조건 모두에서 양항비는 각각 54.13%, 54.85%, 38.85% 증가하였다.
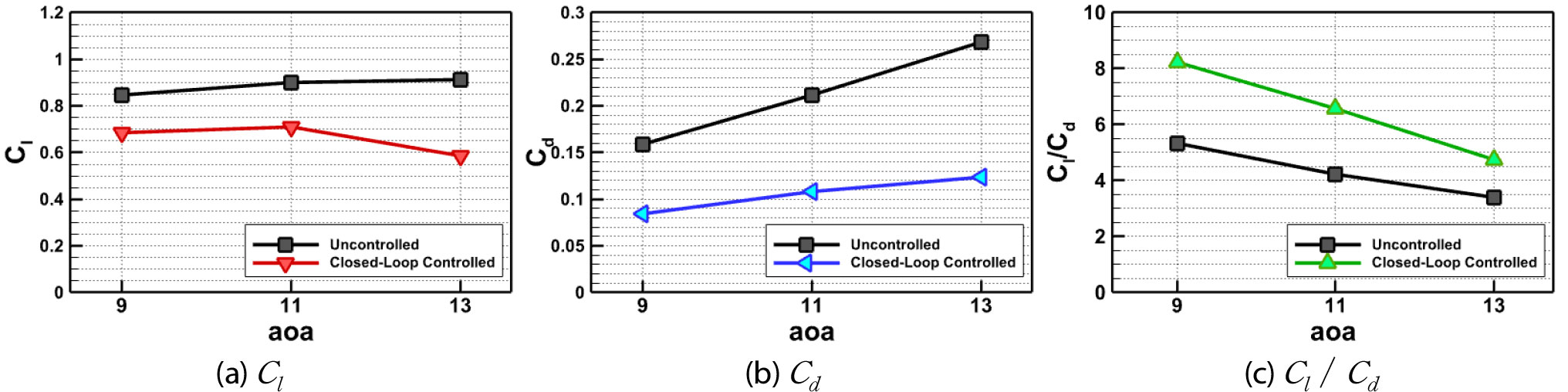
Table 2.
Comparison of aerodynamic coefficients between uncontrolled & closed-loop controlled cases
3.3.2 유동 제어 후 유동장 분석 결과
폐루프 제어의 효과를 확인하기 위해 받음각 13°에서 제어 후 순간 유동장을 Fig. 19에 도시하였다. 제어 전 유동장(Fig. 6)에서는 익형 표면에서 발생한 대규모 박리 와류가 광범위한 영역을 차지하는 것을 확인할 수 있다. 반면, 제어가 적용된 경우(St=1.4)에는 합성 제트 구동으로 생성된 소규모 와류가 박리된 전단층에 운동량을 공급하여, 에너지를 얻은 전단층이 익형에 재부착된다. 이에 따라 박리 지점이 뒤로 이동하고, 대규모 와류 구조가 분리되어 효과적으로 억제되었음을 확인하였다.
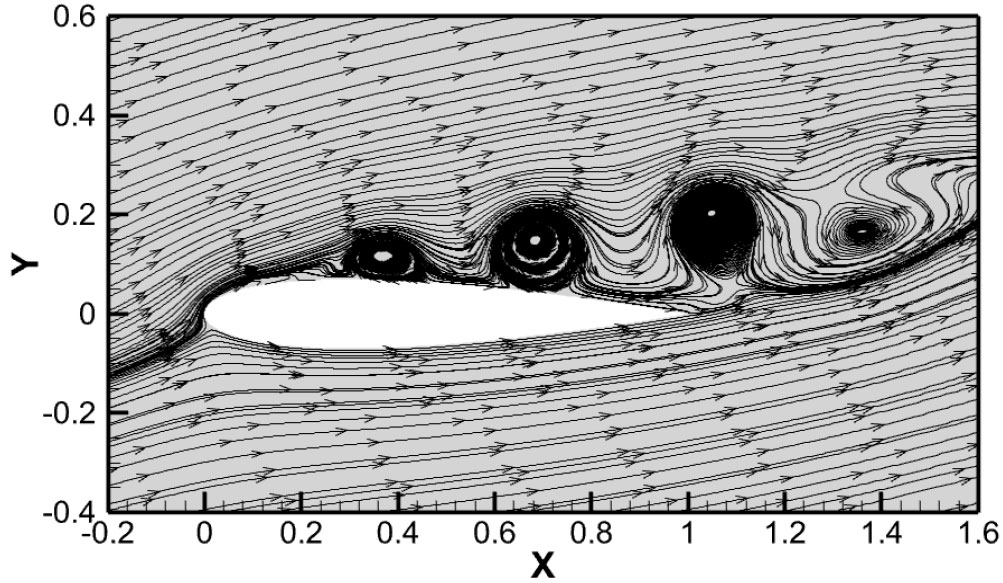
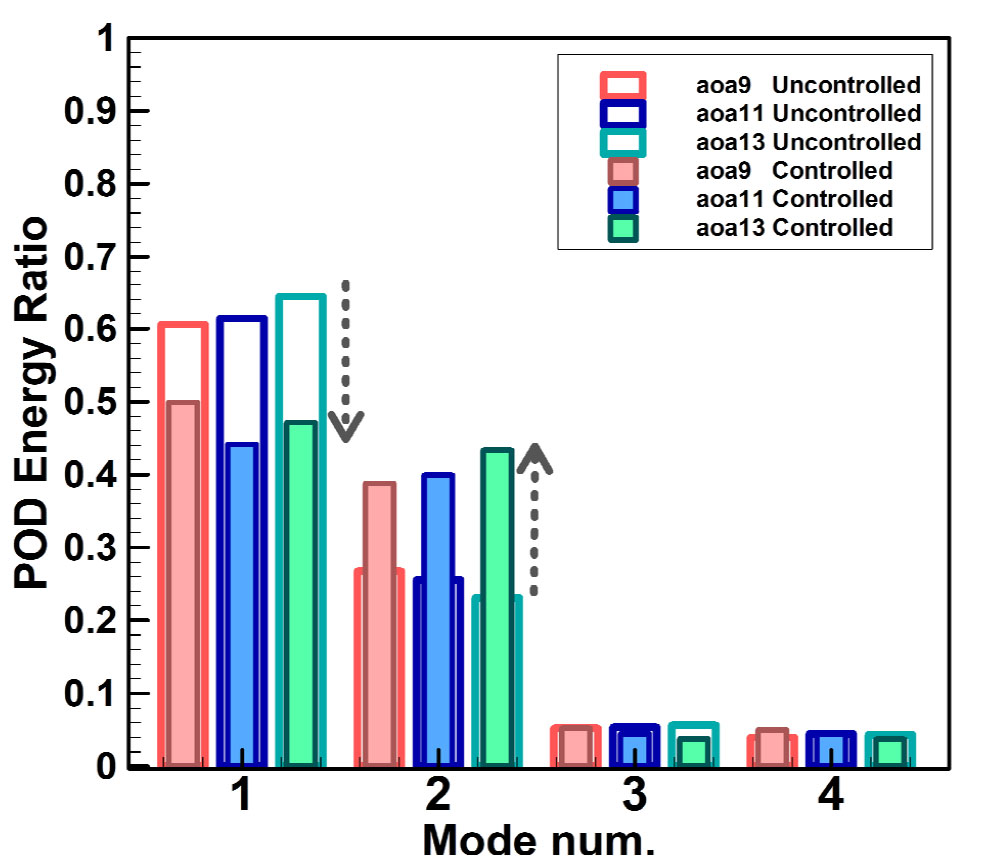
Fig. 20는 동일한 받음각 조건에서 제어가 적용된 후의 POD Mode 1–4의 공간 구조를 나타낸다. 이는 제어 전 상태의 POD 모드(Fig. 8)와 뚜렷한 대비를 보인다. 제어 후에는 상위 4개 모드 내에서 복잡하고 비선형적인 유동 구조가 거의 관찰되지 않았으며, 주요 와류 구조가 단순하고 주기적인 형태로 정리되었다. 이는 제어를 통해 비선형 유동 성분이 효과적으로 억제되고, 전체 유동이 저차 모드에 의해 지배됨을 의미한다[38]. Fig. 21은 제어 전후의 POD 모드 별 에너지 분포를 비교한 결과이다. 제어 전 가장 큰 박리 구조를 나타내던 Mode 1의 에너지 비율은 감소한 반면, Mode 2의 비율은 증가하여 두 모드의 에너지 비율이 유사해졌다. 이는 제어에 의해 유동 에너지가 저차 모드로 재분배되고 선형화되어, 유동이 주기적이고 안정된 상태가 되었음을 의미한다. 이러한 에너지 구조의 변화는 비선형적인 유동을 완화하고 공력 특성 개선으로 이어진 제어 효과를 보여준다.
4. 결 론
본 연구에서는 고받음각 익형에서 발생하는 박리 유동을 효과적으로 억제하고 공력 성능을 향상시키기 위한 능동 유동 제어 기법을 제안하였다. 이를 위해 2차원 NACA0015 익형(Re = 10,000, M = 0.1)의 고받음각 조건(9°, 11°, 13°)에 대해 합성 제트 구동 주파수(St = 0.6–3.0)를 변수로 하는 CFD 데이터베이스를 구축하였다. 구축된 데이터셋을 기반으로, 비선형 유동의 시계열 특성을 실시간으로 예측할 수 있는 NARX-LSTM 기반 유동 추정기(flow estimator)를 개발하였으며, 센서 최적화 결과 익형 윗면 x/c = 0.80 위치의 단일 압력 센서가 모델 예측 성능과 제어 안정성을 모두 만족하는 최적의 피드백 위치로 확인되었다.
개발된 유동 추정기는 폐루프 제어 시스템의 플랜트 대리 모델(surrogate model)로 활용되어, 학습에 포함되지 않은 9개의 검증 케이스에 대해 POD 모드의 시간계수 예측에서 평균 NMSE 0.0159, 압력계수 예측에서 0.0338의 높은 정확도를 달성하였다. 구동 주파수에 유동이 동조되지 못하는 주파수 범위에서도 유동을 효과적으로 재현함을 확인하여 제안한 유동 추정기의 높은 신뢰도를 확보하였다. 최종적으로 NARX-LSTM 기반 유동 추정기와 PID 제어기를 결합한 폐루프 제어 시스템을 구축하였으며, CFD 해석을 통해 제어 성능을 평가하였다. 그 결과, 모든 받음각에서 항력계수가 유의미하게 감소하고 양항비(Cl/Cd)가 고받음각에서 약 40% 이상 향상되어 제안된 제어기의 우수성을 확인하였다.
본 연구는 데이터 기반 대리모델(surrogate model)이 CFD 수준의 예측 정확도를 유지하면서도 실시간 제어가 가능한 프레임워크를 제시하였다는 점에서 의의를 가진다. 특히 구동 주파수 외의 주파수 성분을 가지는 유동을 효과적으로 재현할 수 있다는 점은 추후 주파수 특성이 복잡한 유동에 대해서도 현재의 유동 추정 방법이 적용될 수 있음을 시사한다. 다만, 본 연구는 2차원 익형의 세 가지 받음각 조건에 대해 프레임워크의 유효성을 검증한 초기 단계로서, 향후 모델의 확장성을 위해 다양한 비행 조건에서의 검증이 요구된다. 따라서 실제 운용 환경에서 안정적인 성능을 유지할 수 있도록 강건성 시험을 수행하고, 3차원 유동으로 일반화함으로써 고효율 항공기와 비행체의 능동 제어기 설계에 기여할 것으로 기대된다.
